อุปกรณ์ดิจิทัล: ฟลิปฟล็อป เครื่องเปรียบเทียบ และรีจิสเตอร์
 อุปกรณ์ดิจิทัลสร้างขึ้นจากองค์ประกอบเชิงตรรกะ ดังนั้นจึงเป็นไปตามกฎของพีชคณิตเชิงตรรกะ อุปกรณ์พื้นฐานของเทคโนโลยีดิจิทัลพร้อมกับอุปกรณ์ลอจิกคือฟลิปฟล็อป
อุปกรณ์ดิจิทัลสร้างขึ้นจากองค์ประกอบเชิงตรรกะ ดังนั้นจึงเป็นไปตามกฎของพีชคณิตเชิงตรรกะ อุปกรณ์พื้นฐานของเทคโนโลยีดิจิทัลพร้อมกับอุปกรณ์ลอจิกคือฟลิปฟล็อป
ทริกเกอร์ (ทริกเกอร์ภาษาอังกฤษ - ทริกเกอร์) - อุปกรณ์อิเล็กทรอนิกส์ที่มีสถานะเสถียรสองสถานะและสามารถข้ามจากสถานะหนึ่งไปอีกสถานะหนึ่งภายใต้อิทธิพลของแรงกระตุ้นภายนอก
ทริกเกอร์หรือระบบทริกเกอร์ที่แม่นยำกว่านั้นเรียกว่าอุปกรณ์อิเล็กทรอนิกส์ขนาดใหญ่ที่มีความสามารถในการคงอยู่ในหนึ่งในสองสถานะที่เสถียรเป็นเวลานานและสลับไปมาภายใต้อิทธิพลของสัญญาณภายนอก เงื่อนไขการทริกเกอร์แต่ละอย่างสามารถรับรู้ได้ง่ายจากค่าแรงดันเอาต์พุต
สถานะทริกเกอร์แต่ละสถานะสอดคล้องกับระดับแรงดันเอาต์พุต (สูงหรือต่ำ):
1) ทริกเกอร์ถูกตั้งค่าเป็นสถานะเดียว — ระดับ «1»
2) ฟลิปฟล็อปถูกรีเซ็ต — ระดับ «0» ที่เอาต์พุต
สถานะคงที่จะคงอยู่ตราบเท่าที่ต้องการและสามารถเปลี่ยนแปลงได้โดยพัลส์ภายนอกหรือโดยการปิดแรงดันไฟฟ้า เช.flip-flop เป็นองค์ประกอบหน่วยความจำพื้นฐานที่สามารถจัดเก็บหน่วยข้อมูลที่เล็กที่สุด (หนึ่งบิต) «0» หรือ «1»
ฟลิปฟล็อปสามารถสร้างขึ้นจากองค์ประกอบแยก องค์ประกอบลอจิก บนวงจรรวม หรือเป็นส่วนหนึ่งของวงจรรวม
รองเท้าแตะประเภทหลัก ได้แก่ RS-, D-, T- และ JK-รองเท้าแตะ... นอกจากนี้ รองเท้าแตะยังแบ่งออกเป็นอะซิงโครนัสและซิงโครนัส ในการกระตุ้นแบบอะซิงโครนัส การเปลี่ยนจากสถานะหนึ่งไปยังอีกสถานะหนึ่งทำได้โดยตรงเมื่อสัญญาณมาถึงอินพุตข้อมูล นอกจากอินพุตข้อมูลแล้ว ฟลิปฟล็อปที่ซิงโครไนซ์ยังมีอินพุตนาฬิกาอีกด้วย การสลับเกิดขึ้นเฉพาะเมื่อมีสัญญาณนาฬิกาที่เปิดใช้งานเท่านั้น
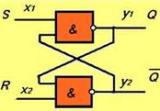
ทริกเกอร์ RS มีอินพุตอย่างน้อยสองตัว: S (set — set) — ทริกเกอร์ถูกตั้งค่าเป็นสถานะระดับ «1» และ R (รีเซ็ต) — ทริกเกอร์ถูกรีเซ็ตเป็นสถานะระดับ «0» (รูปที่ 1)
เมื่อมีอินพุต C ฟลิปฟล็อปจะซิงโครนัส — การสลับฟลิปฟล็อป (การเปลี่ยนสถานะของเอาต์พุต) สามารถเกิดขึ้นได้เฉพาะในช่วงเวลาที่พัลส์ซิงโครไนซ์ (ซิงโครไนซ์) มาถึงที่อินพุต C เท่านั้น

รูปที่ 1 — การแสดงกราฟิกทั่วไปของฟลิปฟล็อป RS และจุดประสงค์ของข้อสรุป ก) อะซิงโครนัส ข) ซิงโครนัส
นอกเหนือจากเอาต์พุตโดยตรง flip-flop ยังสามารถมีเอาต์พุตผกผันซึ่งสัญญาณจะตรงกันข้าม
ตารางที่ 1 แสดงสถานะที่ flip-flop สามารถสันนิษฐานได้ระหว่างการทำงาน ตารางแสดงค่าของสัญญาณอินพุต S และ R ณ ช่วงเวลาหนึ่ง tn และสถานะของ flip-flop (ของเอาต์พุตโดยตรง) ในช่วงเวลาถัดไป tn + 1 หลังจากการมาถึงของเวลาถัดไป พั สถานะทริกเกอร์ใหม่ได้รับผลกระทบจากสถานะก่อนหน้าของ Q n
เช.หากจำเป็นต้องเขียนถึงทริกเกอร์ «1» — เราจะส่งพัลส์ไปยังอินพุต S ถ้า «0» — เราจะส่งพัลส์ไปยังอินพุต R
ชุดค่าผสม S = 1, R = 1 เป็นชุดค่าผสมที่ต้องห้าม เนื่องจากเป็นไปไม่ได้ที่จะคาดเดาว่าสถานะใดจะเกิดขึ้นที่เอาต์พุต
ตารางที่ 1 - ตารางสถานะ flip-flop RS แบบซิงโครนัส

การทำงานของ flip-flop สามารถดูได้โดยใช้แผนภาพเวลา (รูปที่ 2)
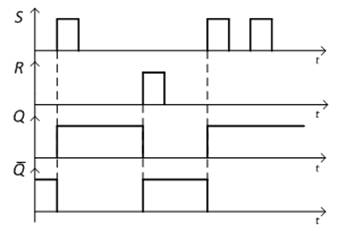
รูปที่ 2 — ไทม์ไดอะแกรมของฟลิปฟล็อป RS แบบอะซิงโครนัส
D-ทริกเกอร์ (จากภาษาอังกฤษ ดีเลย์ — ดีเลย์) มีอินพุตข้อมูลเดียวและอินพุตนาฬิกา (ซิงโครไนซ์) (รูปที่ 3)
D-flip-flop จัดเก็บและจัดเก็บที่เอาต์พุต Q สัญญาณที่อยู่ที่อินพุตข้อมูล D ณ เวลาที่พัลส์นาฬิกามาถึง C. ฟลิปฟล็อปเก็บข้อมูลที่เขียนเมื่อ C = 1
ตารางที่ 2-ตารางสถานะของ D-flip-flop

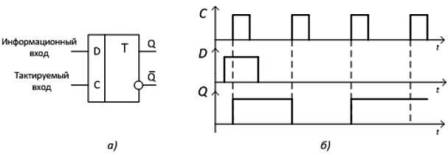
รูปที่ 3 — D -trigger: a) การแสดงภาพแบบธรรมดา b) ไดอะแกรมเวลาของการทำงาน
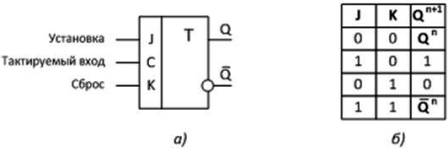
ทริกเกอร์ T (จากภาษาอังกฤษ เกลือกกลิ้ง - คว่ำ, ตีลังกา) เรียกอีกอย่างว่าฟลิปฟล็อปนับ มีข้อมูลหนึ่งอินพุต T แต่ละพัลส์ (การสลายพัลส์) ของอินพุต T (อินพุตการนับ) จะเปลี่ยนทริกเกอร์เป็นสถานะตรงกันข้าม
รูปที่ 4 แสดงสัญลักษณ์ T-ทริกเกอร์ (a) และไดอะแกรมเวลาของการทำงาน (b)
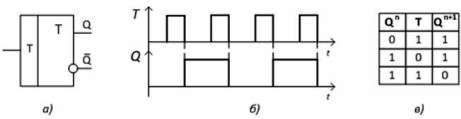
รูปที่ 4-T-flip-flop a) สัญลักษณ์กราฟิกทั่วไป b) แผนภาพเวลาของการทำงาน c) ตารางสถานะ
ทริกเกอร์ JK (จากภาษาอังกฤษ jump — jump, keer — hold) มีสองอินพุตข้อมูล J และ K และอินพุตนาฬิกา C การกำหนดพิน J และ K คล้ายกับการกำหนดพิน R และ S แต่ทริกเกอร์มี ไม่มีชุดค่าผสมที่ต้องห้าม ถ้า J = K = 1 สถานะจะเปลี่ยนเป็นตรงกันข้าม (รูปที่ 5)
ด้วยการเชื่อมต่ออินพุตที่เหมาะสม ทริกเกอร์สามารถทำหน้าที่ของทริกเกอร์ RS-, D-, T เช่น เป็นทริกเกอร์สากล
รูปที่ 5 -JK -flip-flop a) สัญลักษณ์กราฟิกแบบธรรมดา b) ตารางสถานะแบบย่อ
ตัวเปรียบเทียบ (เปรียบเทียบ — เปรียบเทียบ) — อุปกรณ์ที่เปรียบเทียบสองแรงดัน — อินพุต Uin กับ Uref อ้างอิง แรงดันอ้างอิงคือแรงดันคงที่ที่มีขั้วบวกหรือขั้วลบ แรงดันอินพุตจะเปลี่ยนแปลงตลอดเวลา วงจรเปรียบเทียบที่ง่ายที่สุดที่ใช้แอมพลิฟายเออร์ในการดำเนินงานแสดงในรูปที่ 6, a. ถ้า Uin Uop ที่เอาต์พุต U — us (รูปที่ 6, b)
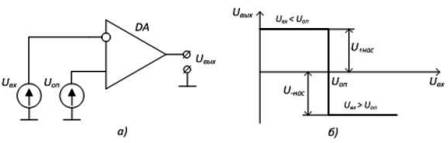
รูปที่ 6 — ตัวเปรียบเทียบออปแอมป์: a) รูปแบบที่ง่ายที่สุด b) ลักษณะการทำงาน
ตัวเปรียบเทียบผลตอบรับเชิงบวกเรียกว่า Schmitt trigger หากตัวเปรียบเทียบเปลี่ยนจาก «1» เป็น «0» และในทางกลับกันที่แรงดันไฟฟ้าเดียวกัน Schmitt trigger - ที่แรงดันไฟฟ้าต่างกัน แรงดันอ้างอิงสร้างวงจร PIC R1R2 สัญญาณอินพุตจะถูกส่งไปยังอินพุตกลับของออปแอมป์ รูปที่ 7, b, แสดงลักษณะการถ่ายโอนของทริกเกอร์ Schmitt
ที่แรงดันลบที่อินพุตสินค้าคงคลังของ OS Uout = U + sat ซึ่งหมายความว่าแรงดันไฟฟ้าบวกจะกระทำกับอินพุตที่ไม่กลับด้าน เมื่อแรงดันอินพุตเพิ่มขึ้น Uin ปัจจุบัน > Uneinv (Uav — ทริกเกอร์) ตัวเปรียบเทียบไปที่สถานะ Uout = U -sat แรงดันลบถูกนำไปใช้กับอินพุตที่ไม่กลับด้าน ดังนั้นเมื่อแรงดันไฟฟ้าอินพุตลดลงในขณะ Uin <Uneinv. (Uav — ทริกเกอร์) ตัวเปรียบเทียบจะเข้าสู่สถานะ Uout = U + sat
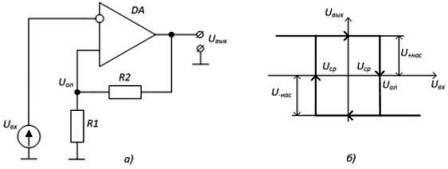
รูปที่ 7 — การทำงานของ Schmitt ของ op-amp: a) รูปแบบที่ง่ายที่สุด b) ลักษณะการทำงาน
ตัวอย่าง. รูปที่ 8 แสดงแผนผังของรีเลย์คอนแทคเตอร์สำหรับควบคุมมอเตอร์ไฟฟ้า ทำให้สตาร์ท หยุด และถอยหลังได้
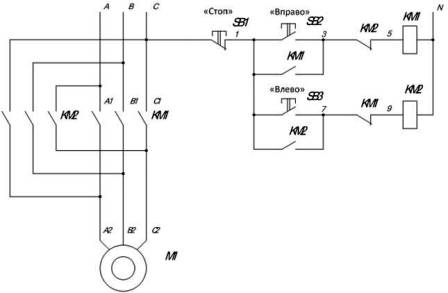
รูปที่ 8 — รูปแบบการควบคุมมอเตอร์คอนแทครีเลย์
การเปลี่ยนมอเตอร์ไฟฟ้าดำเนินการโดยสตาร์ทแม่เหล็ก KM1, KM2 หน้าสัมผัสแบบปิดอย่างอิสระ KM1, KM2 ป้องกันการทำงานพร้อมกันของแม่เหล็กสตาร์ทเตอร์ เปิดหน้าสัมผัสได้อย่างอิสระ KM1, KM2 ให้การล็อคปุ่ม SB2 และ SB3 ด้วยตนเอง
เพื่อปรับปรุงความน่าเชื่อถือของการทำงานจำเป็นต้องเปลี่ยนวงจรควบคุมรีเลย์คอนแทคเตอร์และวงจรไฟฟ้าด้วยระบบแบบไม่สัมผัสโดยใช้อุปกรณ์และอุปกรณ์เซมิคอนดักเตอร์
รูปที่ 9 แสดงวงจรควบคุมมอเตอร์แบบไร้สัมผัส
หน้าสัมผัสพลังงานของสตาร์ตเตอร์แม่เหล็กถูกแทนที่ด้วยออปโตซิมิสเตอร์: KM1-VS1-VS3, KM2-VS4-VS6 การใช้ออปโตซิมิสเตอร์ทำให้สามารถแยกวงจรควบคุมกระแสต่ำออกจากวงจรจ่ายกำลังสูงได้
ทริกเกอร์ให้ปุ่มล็อคตัวเอง SB2, SB3 องค์ประกอบลอจิก และ ให้แน่ใจว่ามีการเปิดใช้งานแม่เหล็กสตาร์ทเตอร์เพียงตัวเดียวพร้อมกัน
เมื่อทรานซิสเตอร์ VT1 เปิดขึ้น กระแสจะไหลผ่าน LED ของออปโตซิมิสเตอร์กลุ่มแรก VS1-VS3 ดังนั้นจึงมั่นใจได้ว่ากระแสจะไหลผ่านขดลวดมอเตอร์ การเปิดทรานซิสเตอร์ VT2 ให้ออปโตซิมิสเตอร์ VS4 กลุ่มที่สอง -VS6 เพื่อให้มั่นใจว่าการหมุนของมอเตอร์ไฟฟ้าไปในทิศทางอื่น
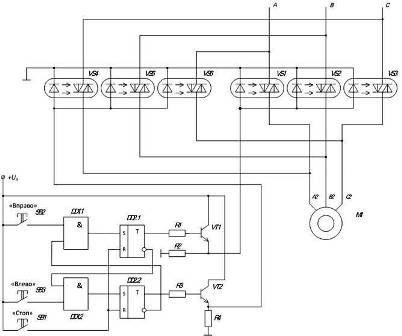
รูปที่ 9 — วงจรควบคุมมอเตอร์แบบไร้สัมผัส
ลงทะเบียน - อุปกรณ์อิเล็กทรอนิกส์ที่ออกแบบมาสำหรับการจัดเก็บระยะสั้นและการแปลงเลขฐานสองหลายหลัก รีจิสเตอร์ประกอบด้วยฟลิปฟลอป จำนวนที่กำหนดจำนวนบิตของเลขฐานสองที่รีจิสเตอร์สามารถจัดเก็บได้ — ขนาดของรีจิสเตอร์ (รูปที่ 10, a) สามารถใช้องค์ประกอบลอจิกเพื่อจัดระเบียบการทำงานของทริกเกอร์
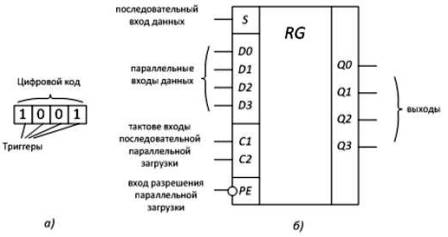
รูปที่ 10 — Register: a) การแสดงทั่วไป b) สัญลักษณ์กราฟิกทั่วไป
ตามวิธีการอินพุตและเอาต์พุตของข้อมูล รีจิสเตอร์จะแบ่งออกเป็นแบบขนานและแบบอนุกรม
ในการลงทะเบียนแบบลำดับ ฟลิปฟล็อปจะเชื่อมต่อเป็นอนุกรม นั่นคือ เอาต์พุตของฟลิปฟล็อปก่อนหน้าจะส่งผ่านข้อมูลไปยังอินพุตของฟลิปฟล็อปถัดไป อินพุตนาฬิกาฟลิปฟล็อป C เชื่อมต่อแบบขนาน รีจิสเตอร์ดังกล่าวมีอินพุตข้อมูลหนึ่งอินพุตและอินพุตควบคุม - อินพุตนาฬิกา C
รีจิสเตอร์แบบขนานเขียนไปยังฟลิปฟลอปพร้อมๆ กันซึ่งมีอินพุตข้อมูลสี่อินพุต
รูปที่ 10 แสดง UGO และการจัดสรรพินของรีจิสเตอร์อนุกรมแบบขนานสี่บิต