ระบบไมโครโปรเซสเซอร์
 การใช้ระบบไมโครโปรเซสเซอร์ในอุปกรณ์ไฟฟ้าเกือบทั้งหมดเป็นคุณสมบัติที่สำคัญที่สุดของโครงสร้างพื้นฐานทางเทคนิคของสังคมยุคใหม่ ระบบไฟฟ้า อุตสาหกรรม การขนส่ง การสื่อสาร ต้องอาศัยระบบควบคุมด้วยคอมพิวเตอร์เป็นอย่างมาก ระบบไมโครโปรเซสเซอร์ถูกฝังอยู่ในเครื่องมือวัด อุปกรณ์ไฟฟ้า การติดตั้งไฟ ฯลฯ
การใช้ระบบไมโครโปรเซสเซอร์ในอุปกรณ์ไฟฟ้าเกือบทั้งหมดเป็นคุณสมบัติที่สำคัญที่สุดของโครงสร้างพื้นฐานทางเทคนิคของสังคมยุคใหม่ ระบบไฟฟ้า อุตสาหกรรม การขนส่ง การสื่อสาร ต้องอาศัยระบบควบคุมด้วยคอมพิวเตอร์เป็นอย่างมาก ระบบไมโครโปรเซสเซอร์ถูกฝังอยู่ในเครื่องมือวัด อุปกรณ์ไฟฟ้า การติดตั้งไฟ ฯลฯ
ทั้งหมดนี้ทำให้วิศวกรไฟฟ้าต้องรู้พื้นฐานของเทคโนโลยีไมโครโปรเซสเซอร์เป็นอย่างน้อย
ระบบไมโครโปรเซสเซอร์ได้รับการออกแบบให้ประมวลผลข้อมูลโดยอัตโนมัติและควบคุมกระบวนการต่างๆ
คำว่า "ระบบไมโครโปรเซสเซอร์" นั้นกว้างมากและรวมถึงแนวคิดเช่น "เครื่องคอมพิวเตอร์อิเล็กทรอนิกส์ (ECM)", "คอมพิวเตอร์ควบคุม", "คอมพิวเตอร์" และอื่นๆ
ระบบไมโครโปรเซสเซอร์ประกอบด้วยฮาร์ดแวร์หรือในภาษาอังกฤษ — ฮาร์ดแวร์และซอฟต์แวร์ (ซอฟต์แวร์) — ซอฟต์แวร์
ข้อมูลดิจิทัล
ระบบไมโครโปรเซสเซอร์ทำงานร่วมกับข้อมูลดิจิทัลซึ่งเป็นรหัสตัวเลขชุดหนึ่ง
ที่แกนหลักของระบบไมโครโปรเซสเซอร์คือไมโครโปรเซสเซอร์ที่สามารถรับได้เฉพาะเลขฐานสอง (ประกอบด้วย 0 และ 1)เลขฐานสองเขียนโดยใช้ระบบเลขฐานสอง ตัวอย่างเช่นในชีวิตประจำวันเราใช้ระบบเลขฐานสิบที่ใช้อักขระหรือตัวเลขสิบตัวในการเขียนตัวเลข 0,1,2,3,4,5,6,7,8,9 ดังนั้นในระบบเลขฐานสองจึงมีเพียงสองสัญลักษณ์ (หรือตัวเลข) ดังกล่าว — 0 และ 1
จำเป็นต้องเข้าใจว่าระบบตัวเลขเป็นเพียงกฎสำหรับการเขียนตัวเลขและการเลือกประเภทของระบบจะพิจารณาจากความสะดวกในการใช้งาน ทางเลือกของระบบเลขฐานสองเกิดจากความเรียบง่าย ซึ่งหมายถึงความน่าเชื่อถือของอุปกรณ์ดิจิทัลและความสะดวกในการใช้งานทางเทคนิค
พิจารณาหน่วยการวัดข้อมูลดิจิทัล:
บิต (จากภาษาอังกฤษ «Binary digiT» — เลขฐานสอง) ใช้เพียงสองค่า: 0 หรือ 1 คุณสามารถเข้ารหัสค่าตรรกะ «ใช่» หรือ «ไม่» สถานะ «เปิด» หรือ «ปิด» สถานะ « เปิด» «หรือ» ปิด «เป็นต้น
กลุ่มของแปดบิตเรียกว่าหนึ่งไบต์ เช่น 10010111 หนึ่งไบต์ช่วยให้คุณเข้ารหัสค่าได้ 256 ค่า: 00000000 — 0, 11111111 — 255
บิตเป็นหน่วยข้อมูลที่เล็กที่สุด
Byte — หน่วยที่เล็กที่สุดของการประมวลผลข้อมูลที่เล็กที่สุด ไบต์ - ส่วนหนึ่งของคำเครื่อง โดยปกติประกอบด้วย 8 บิตและใช้เป็นหน่วยสำหรับจำนวนข้อมูลระหว่างการจัดเก็บ การส่ง และการประมวลผลบนคอมพิวเตอร์ ไบต์ทำหน้าที่แทนตัวอักษร พยางค์ และอักขระพิเศษ (ปกติใช้ทั้งหมด 8 บิต) หรือเลขฐานสิบ (แต่ละ 2 หลักใน 1 ไบต์)
สองไบต์ที่อยู่ติดกันเรียกว่าคำ 4 ไบต์ต่อคำคู่ 8 ไบต์ต่อคำสี่คำ
ข้อมูลเกือบทั้งหมดที่อยู่รอบตัวเราเป็นอะนาล็อก ดังนั้น ก่อนที่ข้อมูลจะเข้าสู่โปรเซสเซอร์เพื่อประมวลผล ข้อมูลจะถูกแปลงโดยใช้ ADC (ตัวแปลงแอนะล็อกเป็นดิจิทัล)นอกจากนี้ ข้อมูลจะถูกเข้ารหัสในรูปแบบเฉพาะและสามารถเป็นดิจิทัล ลอจิคัล ข้อความ (สัญลักษณ์) กราฟิก วิดีโอ ฯลฯ
ตัวอย่างเช่น ตารางของรหัส ASCII (จากรหัสมาตรฐานอังกฤษอเมริกันสำหรับการแลกเปลี่ยนข้อมูล) ใช้เพื่อเข้ารหัสข้อมูลข้อความ อักขระหนึ่งตัวเขียนในหนึ่งไบต์ซึ่งสามารถรับค่าได้ 256 ค่า ข้อมูลกราฟิกแบ่งออกเป็นจุด (พิกเซล) และสีและตำแหน่งของแต่ละจุดจะถูกเข้ารหัสในแนวนอนและแนวตั้ง
นอกเหนือจากระบบเลขฐานสองและทศนิยมแล้ว MS ยังใช้ระบบเลขฐานสิบหกซึ่งใช้สัญลักษณ์ 0 ... 9 และ A ... F ในการเขียนตัวเลข การใช้งานนี้เกิดจากการที่หนึ่งไบต์อธิบายโดยสอง - เลขฐานสิบหกซึ่งช่วยลดการบันทึกรหัสตัวเลขและทำให้อ่านได้ง่ายขึ้น (11111111 — FF)
ตารางที่ 1 — การเขียนตัวเลขในระบบจำนวนต่างๆ
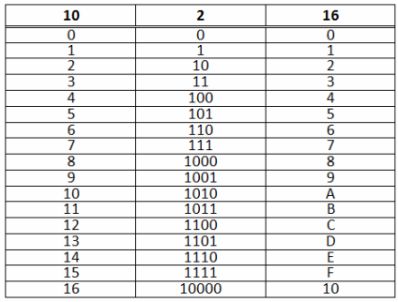
เพื่อกำหนดค่าของตัวเลข (ตัวอย่างเช่น ค่าของตัวเลข 100 สำหรับระบบตัวเลขที่แตกต่างกันสามารถเป็น 42, 10010, 25616) ที่ส่วนท้ายของตัวเลขให้เพิ่มตัวอักษรละตินที่ระบุระบบตัวเลข: สำหรับเลขฐานสอง ตัวอักษร b สำหรับเลขฐานสิบหก — h สำหรับเลขฐานสิบ — d จำนวนที่ไม่มีการกำหนดเพิ่มเติมถือเป็นทศนิยม
การแปลงตัวเลขจากระบบหนึ่งไปยังอีกระบบหนึ่งและการดำเนินการทางคณิตศาสตร์และตรรกะพื้นฐานด้วยตัวเลขช่วยให้คุณสร้างเครื่องคิดเลขทางวิศวกรรมได้ (แอปพลิเคชันมาตรฐานของระบบปฏิบัติการ Windows)
โครงสร้างของระบบไมโครโปรเซสเซอร์
ระบบไมโครโปรเซสเซอร์ขึ้นอยู่กับไมโครโปรเซสเซอร์ (โปรเซสเซอร์) ที่ทำหน้าที่ประมวลผลและควบคุมข้อมูล อุปกรณ์ที่เหลือซึ่งประกอบกันเป็นระบบไมโครโปรเซสเซอร์จะให้บริการโปรเซสเซอร์โดยช่วยในการทำงาน
อุปกรณ์บังคับสำหรับการสร้างระบบไมโครโปรเซสเซอร์คือพอร์ตอินพุต / เอาต์พุตและหน่วยความจำบางส่วน... พอร์ตอินพุต - เอาต์พุตเชื่อมต่อโปรเซสเซอร์กับโลกภายนอกโดยให้ข้อมูลสำหรับการประมวลผลและส่งออกผลลัพธ์ของการประมวลผลหรือการดำเนินการควบคุม ปุ่ม (แป้นพิมพ์) เซ็นเซอร์ต่าง ๆ เชื่อมต่อกับพอร์ตอินพุต ไปยังพอร์ตเอาต์พุต — อุปกรณ์ที่ช่วยให้สามารถควบคุมไฟฟ้าได้: ไฟแสดงสถานะ จอแสดงผล คอนแทคเตอร์ โซลินอยด์วาล์ว มอเตอร์ไฟฟ้า ฯลฯ
หน่วยความจำจำเป็นเป็นหลักในการจัดเก็บโปรแกรม (หรือชุดโปรแกรม) ที่จำเป็นสำหรับการทำงานของโปรเซสเซอร์ โปรแกรมคือลำดับของคำสั่งที่โปรเซสเซอร์เข้าใจ เขียนโดยมนุษย์ (โดยปกติคือโปรแกรมเมอร์)
โครงสร้างของระบบไมโครโปรเซสเซอร์แสดงในรูปที่ 1 ในรูปแบบง่าย โปรเซสเซอร์ประกอบด้วยหน่วยคำนวณทางตรรกะ (ALU) ที่ประมวลผลข้อมูลดิจิทัล และหน่วยควบคุม (CU)
หน่วยความจำโดยทั่วไปประกอบด้วยหน่วยความจำแบบอ่านอย่างเดียว (ROM) ซึ่งไม่ลบเลือนและมีไว้สำหรับจัดเก็บข้อมูลระยะยาว (เช่น โปรแกรม) และหน่วยความจำเข้าถึงโดยสุ่ม (RAM) ซึ่งมีไว้สำหรับจัดเก็บข้อมูลชั่วคราว

รูปที่ 1 — โครงสร้างของระบบไมโครโปรเซสเซอร์
โปรเซสเซอร์ พอร์ต และหน่วยความจำสื่อสารระหว่างกันผ่านบัส บัสคือชุดของสายไฟที่รวมกันตามหน้าที่ ซิสเต็มบัสชุดเดียวเรียกว่า อินทราซิสเต็มบัส ซึ่งมี:
-
บัสข้อมูล DB (Data Bus) ซึ่งมีการแลกเปลี่ยนข้อมูลระหว่างโปรเซสเซอร์ หน่วยความจำ และพอร์ต
-
แอดเดรสบัส AB (Address Bus) ใช้เพื่อระบุตำแหน่งเซลล์หน่วยความจำและพอร์ตของโปรเซสเซอร์
-
บัสควบคุม CB (Control Bus) ชุดของสายที่ส่งสัญญาณควบคุมต่างๆ จากโปรเซสเซอร์ไปยังอุปกรณ์ภายนอกและในทางกลับกัน
ไมโครโปรเซสเซอร์
ไมโครโปรเซสเซอร์ — อุปกรณ์ที่ควบคุมด้วยซอฟต์แวร์ที่ออกแบบมาเพื่อประมวลผลข้อมูลดิจิทัลและควบคุมกระบวนการของการประมวลผลนี้ ซึ่งทำในรูปแบบของวงจรรวมหนึ่ง (หรือหลายวงจร) ที่มีการรวมองค์ประกอบอิเล็กทรอนิกส์ในระดับสูง
ไมโครโปรเซสเซอร์มีลักษณะเป็นพารามิเตอร์จำนวนมาก เนื่องจากเป็นทั้งอุปกรณ์ที่ควบคุมด้วยซอฟต์แวร์ที่ซับซ้อนและอุปกรณ์อิเล็กทรอนิกส์ (ไมโครวงจร) ดังนั้น สำหรับไมโครโปรเซสเซอร์ ทั้งประเภทเคสและชุดคำสั่งสำหรับโปรเซสเซอร์… ความสามารถของไมโครโปรเซสเซอร์ถูกกำหนดโดยแนวคิดของสถาปัตยกรรมไมโครโปรเซสเซอร์
คำนำหน้า «micro» ในชื่อของโปรเซสเซอร์หมายความว่ามีการใช้งานโดยใช้เทคโนโลยีไมครอน

รูปที่ 2 — มุมมองภายนอกของไมโครโปรเซสเซอร์ Intel Pentium 4
ระหว่างการทำงาน ไมโครโปรเซสเซอร์จะอ่านคำสั่งโปรแกรมจากหน่วยความจำหรือพอร์ตอินพุตและดำเนินการ ความหมายของแต่ละคำสั่งถูกกำหนดโดยชุดคำสั่งของโปรเซสเซอร์ชุดคำสั่งถูกสร้างขึ้นในสถาปัตยกรรมของไมโครโปรเซสเซอร์และการดำเนินการของรหัสคำสั่งจะแสดงในการดำเนินการของไมโครปฏิบัติการบางอย่างโดยองค์ประกอบภายในของโปรเซสเซอร์
สถาปัตยกรรมไมโครโปรเซสเซอร์ — นี่คือองค์กรเชิงตรรกะ มันกำหนดความสามารถของไมโครโปรเซสเซอร์ในแง่ของการใช้งานฮาร์ดแวร์และซอฟต์แวร์ของฟังก์ชั่นที่จำเป็นในการสร้างระบบไมโครโปรเซสเซอร์
ลักษณะสำคัญของไมโครโปรเซสเซอร์:
1) ความถี่สัญญาณนาฬิกา (หน่วยการวัด MHz หรือ GHz) — จำนวนสัญญาณนาฬิกาใน 1 วินาทีพัลส์สัญญาณนาฬิกาถูกสร้างขึ้นโดยตัวสร้างสัญญาณนาฬิกา ซึ่งโดยปกติจะอยู่ภายในโปรเซสเซอร์ เนื่องจากการดำเนินการทั้งหมด (คำแนะนำ) ดำเนินการเป็นรอบสัญญาณนาฬิกา ประสิทธิภาพการทำงาน (จำนวนการดำเนินการต่อหน่วยเวลา) จึงขึ้นอยู่กับความถี่สัญญาณนาฬิกา ความถี่ของโปรเซสเซอร์อาจแตกต่างกันไปภายในขอบเขตที่กำหนด
2) ตัวประมวลผลบิต (8, 16, 32, 64 บิต ฯลฯ) — ระบุจำนวนไบต์ของข้อมูลที่ประมวลผลในหนึ่งรอบสัญญาณนาฬิกา ความกว้างบิตของโปรเซสเซอร์ถูกกำหนดโดยความกว้างบิตของรีจิสเตอร์ภายใน โปรเซสเซอร์สามารถเป็น 8 บิต 16 บิต 32 บิต 64 บิต ฯลฯ เช่น ข้อมูลถูกประมวลผลเป็นกลุ่มขนาด 1, 2, 4, 8 ไบต์ เป็นที่ชัดเจนว่ายิ่งความลึกของบิตมากเท่าใด ประสิทธิภาพการทำงานก็จะยิ่งสูงขึ้นเท่านั้น
สถาปัตยกรรมภายในของไมโครโปรเซสเซอร์
สถาปัตยกรรมภายในที่เรียบง่ายของไมโครโปรเซสเซอร์ 8 บิตทั่วไปแสดงในรูปที่ 3 โครงสร้างของไมโครโปรเซสเซอร์สามารถแบ่งออกเป็นสามส่วนหลัก:
1) ลงทะเบียนเพื่อจัดเก็บคำสั่ง ข้อมูล และที่อยู่ชั่วคราว
2) หน่วยคำนวณและตรรกะ (ALU) ซึ่งดำเนินการทางคณิตศาสตร์และตรรกะ
3) วงจรควบคุมและจับเวลา — ให้การเลือกคำสั่ง จัดระเบียบการทำงานของ ALU ให้การเข้าถึงรีจิสเตอร์ไมโครโปรเซสเซอร์ทั้งหมด รับรู้และสร้างสัญญาณควบคุมภายนอก
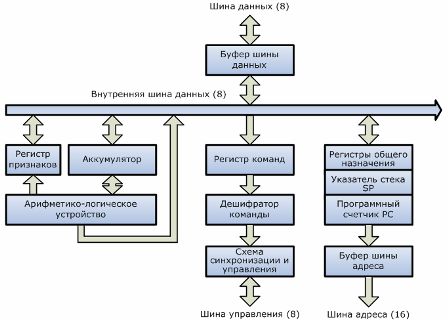
รูปที่ 3 — สถาปัตยกรรมภายในที่เรียบง่ายของไมโครโปรเซสเซอร์ 8 บิต
ดังที่คุณเห็นจากแผนภาพ ตัวประมวลผลจะขึ้นอยู่กับการลงทะเบียนซึ่งแบ่งออกเป็นการลงทะเบียนพิเศษ (โดยมีวัตถุประสงค์เฉพาะ) และการลงทะเบียนวัตถุประสงค์ทั่วไป
ตัวนับโปรแกรม (คอมพิวเตอร์) — รีจิสเตอร์ที่มีแอดเดรสของไบต์คำสั่งถัดไป โปรเซสเซอร์จำเป็นต้องรู้ว่าคำสั่งใดที่จะดำเนินการต่อไป
แบตเตอรี่ — รีจิสเตอร์ที่ใช้ในคำสั่งส่วนใหญ่สำหรับการประมวลผลตรรกะและเลขคณิต เป็นทั้งแหล่งที่มาของหนึ่งในไบต์ของข้อมูลที่จำเป็นสำหรับการดำเนินการ ALU และตำแหน่งที่วางผลลัพธ์ของการดำเนินการ ALU
การลงทะเบียนฟังก์ชัน (หรือการลงทะเบียนแฟล็ก) มีข้อมูลเกี่ยวกับสถานะภายในของไมโครโปรเซสเซอร์ โดยเฉพาะผลลัพธ์ของการดำเนินการ ALU ครั้งล่าสุด แฟล็กรีจิสเตอร์ไม่ใช่รีจิสเตอร์ในความหมายปกติ แต่เป็นเพียงชุดของฟลิปฟลอป (แฟล็กขึ้นหรือลง โดยปกติจะมีแฟล็กเป็นศูนย์ โอเวอร์โฟลว์ เนกาทีฟ และแครี่)
Stack Pointer (SP) — ติดตามตำแหน่งของสแต็ก นั่นคือ มีที่อยู่ของเซลล์ที่ใช้ล่าสุด Stack — วิธีการจัดระเบียบการจัดเก็บข้อมูล
การลงทะเบียนคำสั่งประกอบด้วยไบต์คำสั่งปัจจุบันที่ถูกถอดรหัสโดยตัวถอดรหัสคำสั่ง
สายบัสภายนอกถูกแยกออกจากสายบัสภายในด้วยบัฟเฟอร์ และองค์ประกอบหลักภายในเชื่อมต่อด้วยบัสข้อมูลภายในความเร็วสูง
เพื่อปรับปรุงประสิทธิภาพของระบบมัลติโปรเซสเซอร์ ฟังก์ชันของโปรเซสเซอร์กลางสามารถกระจายไปยังโปรเซสเซอร์หลายตัว เพื่อช่วยตัวประมวลผลกลาง คอมพิวเตอร์มักจะแนะนำตัวประมวลผลร่วม โดยมุ่งเน้นที่การดำเนินการอย่างมีประสิทธิภาพของฟังก์ชันเฉพาะใดๆ ตัวประมวลผลร่วมทางคณิตศาสตร์และกราฟิกที่แพร่หลาย อินพุตและเอาต์พุตลดภาระตัวประมวลผลกลางจากการทำงานง่ายๆ แต่มีปฏิสัมพันธ์กับอุปกรณ์ภายนอกมากมาย
ในขั้นตอนปัจจุบัน ทิศทางหลักของการเพิ่มผลผลิตคือการพัฒนาโปรเซสเซอร์แบบมัลติคอร์ เช่น การรวมโปรเซสเซอร์ตั้งแต่สองตัวขึ้นไปในกรณีเดียวเพื่อดำเนินการหลายอย่างพร้อมกัน (พร้อมกัน)
Intel และ AMD เป็นบริษัทชั้นนำสำหรับการออกแบบและผลิตโปรเซสเซอร์
อัลกอริทึมของระบบไมโครโปรเซสเซอร์
อัลกอริทึม — ใบสั่งยาที่แม่นยำซึ่งกำหนดกระบวนการเฉพาะในการแปลงข้อมูลเริ่มต้นเป็นลำดับของการดำเนินการที่ช่วยให้แก้ปัญหาชุดของงานในระดับหนึ่งและได้ผลลัพธ์ที่ต้องการ
องค์ประกอบการควบคุมหลักของระบบไมโครโปรเซสเซอร์ทั้งหมดคือ โปรเซสเซอร์... ยกเว้นกรณีพิเศษบางประการที่จะควบคุมอุปกรณ์อื่น ๆ ทั้งหมด อุปกรณ์ที่เหลือเช่น RAM, ROM และพอร์ต I/O เป็นรองลงมา
ทันทีที่เปิดใช้งาน โปรเซสเซอร์จะเริ่มอ่านรหัสดิจิทัลจากพื้นที่หน่วยความจำที่สงวนไว้สำหรับจัดเก็บโปรแกรม การอ่านจะทำตามลำดับเซลล์โดยเริ่มจากเซลล์แรก เซลล์ประกอบด้วยข้อมูล ที่อยู่ และคำสั่ง คำสั่งเป็นหนึ่งในการกระทำพื้นฐานที่ไมโครโปรเซสเซอร์สามารถทำได้ การทำงานทั้งหมดของไมโครโปรเซสเซอร์จะลดลงเป็นการอ่านและดำเนินการคำสั่งตามลำดับ
พิจารณาลำดับการทำงานของไมโครโปรเซสเซอร์ระหว่างการดำเนินการคำสั่งโปรแกรม:
1) ก่อนดำเนินการคำสั่งถัดไป ไมโครโปรเซสเซอร์จะเก็บที่อยู่ของมันไว้ในตัวนับโปรแกรมคอมพิวเตอร์
2) MP เข้าถึงหน่วยความจำตามที่อยู่ที่มีอยู่ในคอมพิวเตอร์และอ่านไบต์แรกของคำสั่งถัดไปจากหน่วยความจำในรีจิสเตอร์คำสั่ง
3) ตัวถอดรหัสคำสั่งถอดรหัส (ถอดรหัส) รหัสคำสั่ง
4) ตามข้อมูลที่ได้รับจากตัวถอดรหัส ชุดควบคุมจะสร้างลำดับเวลาของการทำงานแบบไมโครที่ดำเนินการตามคำสั่งคำสั่ง รวมถึง:
— ดึงตัวถูกดำเนินการจากรีจิสเตอร์และหน่วยความจำ
— ดำเนินการทางคณิตศาสตร์ ตรรกะ หรือการดำเนินการอื่น ๆ ตามที่กำหนดโดยรหัสคำสั่ง
— ขึ้นอยู่กับความยาวของคำสั่ง เปลี่ยนเนื้อหาของคอมพิวเตอร์
— ถ่ายโอนการควบคุมไปยังคำสั่งถัดไปซึ่งมีที่อยู่อีกครั้งในตัวนับโปรแกรมคอมพิวเตอร์
ชุดคำสั่งสำหรับไมโครโปรเซสเซอร์สามารถแบ่งออกเป็นสามกลุ่ม:
1) คำสั่งย้ายข้อมูล
การถ่ายโอนเกิดขึ้นระหว่างหน่วยความจำ โปรเซสเซอร์ พอร์ต I / O (แต่ละพอร์ตมีที่อยู่ของตัวเอง) ระหว่างการลงทะเบียนโปรเซสเซอร์
2) คำสั่งการแปลงข้อมูล
ข้อมูลทั้งหมด (ข้อความ รูปภาพ วิดีโอ ฯลฯ) เป็นตัวเลข และเฉพาะการดำเนินการทางคณิตศาสตร์และตรรกะเท่านั้นที่สามารถดำเนินการกับตัวเลขได้ ดังนั้นคำสั่งในกลุ่มนี้จึงได้แก่ การบวก การลบ การเปรียบเทียบ การดำเนินการทางตรรกะ เป็นต้น
3) การถ่ายโอนคำสั่งควบคุม
เป็นเรื่องยากมากที่โปรแกรมจะประกอบด้วยคำสั่งแบบลำดับเดียว อัลกอริทึมส่วนใหญ่ต้องการการแตกแขนงของโปรแกรม เพื่อให้โปรแกรมเปลี่ยนอัลกอริทึมของการทำงานขึ้นอยู่กับเงื่อนไขใด ๆ จะใช้คำสั่งถ่ายโอนการควบคุม คำสั่งเหล่านี้ช่วยให้แน่ใจว่าการไหลของโปรแกรมดำเนินไปตามเส้นทางต่างๆ และจัดระเบียบการวนซ้ำ
อุปกรณ์ภายนอก
อุปกรณ์ภายนอกรวมถึงอุปกรณ์ทั้งหมดที่อยู่ภายนอกโปรเซสเซอร์ (ยกเว้น RAM) และเชื่อมต่อผ่านพอร์ต I / O อุปกรณ์ภายนอกสามารถแบ่งออกได้เป็นสามกลุ่ม:
1) อุปกรณ์สื่อสารระหว่างมนุษย์กับคอมพิวเตอร์ (แป้นพิมพ์ จอภาพ เครื่องพิมพ์ ฯลฯ)
2) อุปกรณ์สำหรับการสื่อสารกับวัตถุควบคุม (เซ็นเซอร์, แอคชูเอเตอร์, ADC และ DAC)
3) อุปกรณ์จัดเก็บข้อมูลภายนอกที่มีความจุสูง (ฮาร์ดดิสก์ ฟล็อปปี้ดิสก์)
อุปกรณ์ภายนอกเชื่อมต่อกับระบบไมโครโปรเซสเซอร์ทางกายภาพ — ผ่านตัวเชื่อมต่อและทางตรรกะ — ผ่านพอร์ต (ตัวควบคุม)
ระบบขัดจังหวะ (กลไก) ใช้เพื่อเชื่อมต่อระหว่างโปรเซสเซอร์และอุปกรณ์ภายนอก
ระบบอินเตอร์รัปต์
นี่เป็นกลไกพิเศษที่อนุญาตเมื่อใดก็ได้ผ่านสัญญาณภายนอก เพื่อบังคับให้โปรเซสเซอร์หยุดการทำงานของโปรแกรมหลัก ดำเนินการที่เกี่ยวข้องกับเหตุการณ์ที่ทำให้เกิดการหยุดชะงัก จากนั้นกลับสู่การดำเนินการของโปรแกรมหลัก .
ไมโครโปรเซสเซอร์ทุกตัวมีอินพุตคำขอขัดจังหวะอย่างน้อยหนึ่งรายการ INT (จากคำว่า Interrupt)
ลองพิจารณาตัวอย่างการโต้ตอบของโปรเซสเซอร์คอมพิวเตอร์ส่วนบุคคลกับแป้นพิมพ์ (รูปที่ 4)
แป้นพิมพ์ — อุปกรณ์สำหรับป้อนข้อมูลสัญลักษณ์และคำสั่งควบคุม ในการเชื่อมต่อแป้นพิมพ์ คอมพิวเตอร์มีพอร์ตแป้นพิมพ์พิเศษ (ชิป)
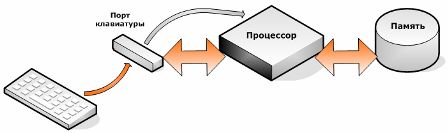
รูปที่ 4 — การทำงานของ CPU กับแป้นพิมพ์
อัลกอริทึมการทำงาน:
1) เมื่อกดปุ่ม ตัวควบคุมแป้นพิมพ์จะสร้างรหัสตัวเลข สัญญาณนี้ไปที่ชิปพอร์ตของแป้นพิมพ์
2) พอร์ตแป้นพิมพ์ส่งสัญญาณขัดจังหวะไปยัง CPU อุปกรณ์ภายนอกแต่ละเครื่องมีหมายเลขการขัดจังหวะของตัวเองซึ่งโปรเซสเซอร์รู้จัก
3) หลังจากได้รับการขัดจังหวะจากแป้นพิมพ์ โปรเซสเซอร์จะขัดจังหวะการทำงานของโปรแกรม (เช่น โปรแกรมแก้ไข Microsoft Office Word) และโหลดโปรแกรมสำหรับประมวลผลรหัสแป้นพิมพ์จากหน่วยความจำ โปรแกรมดังกล่าวเรียกว่าไดรเวอร์
4) โปรแกรมนี้นำโปรเซสเซอร์ไปยังพอร์ตแป้นพิมพ์และรหัสตัวเลขจะถูกโหลดลงในการลงทะเบียนโปรเซสเซอร์
5) รหัสดิจิทัลถูกจัดเก็บไว้ในหน่วยความจำและโปรเซสเซอร์ยังคงทำงานอื่นต่อไป
เนื่องจากการทำงานความเร็วสูง โปรเซสเซอร์จึงดำเนินการกระบวนการจำนวนมากพร้อมกัน