Anti-aliasing filters และตัวปรับแรงดันไฟฟ้า
 ตัวกรองการปรับให้เรียบได้รับการออกแบบมาเพื่อลดการกระเพื่อมของแรงดันไฟฟ้าที่ถูกแก้ไข การปรับระลอกคลื่นให้เรียบนั้นประเมินโดยปัจจัยการปรับให้เรียบ q
ตัวกรองการปรับให้เรียบได้รับการออกแบบมาเพื่อลดการกระเพื่อมของแรงดันไฟฟ้าที่ถูกแก้ไข การปรับระลอกคลื่นให้เรียบนั้นประเมินโดยปัจจัยการปรับให้เรียบ q
องค์ประกอบหลักของตัวกรองการปรับให้เรียบคือตัวเก็บประจุ ตัวเหนี่ยวนำ และทรานซิสเตอร์ที่มีความต้านทานต่างกันสำหรับกระแสตรงและกระแสสลับ
ขึ้นอยู่กับประเภทของไส้กรอง ความแตกต่างระหว่างตัวกรองแบบคาปาซิทีฟ อุปนัย และอิเล็กทรอนิกส์ ตามจำนวนลิงก์การกรอง ตัวกรองจะแบ่งออกเป็นลิงก์เดียวและหลายลิงก์
ตัวกรองแบบ capacitive เป็นตัวเก็บประจุที่มีความจุสูงซึ่งเชื่อมต่อแบบขนานกับตัวต้านทานโหลด Rn ตัวเก็บประจุมีความต้านทานไฟฟ้ากระแสตรงสูงและความต้านทานไฟฟ้ากระแสสลับต่ำ พิจารณาการทำงานของตัวกรองในตัวอย่างวงจรเรียงกระแสครึ่งคลื่น (รูปที่ 1, a)
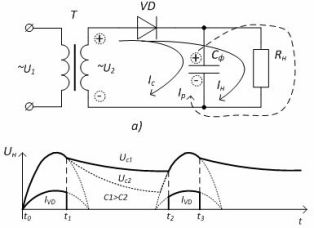
รูปที่ 1-วงจรเรียงกระแสครึ่งคลื่นเฟสเดียวพร้อมตัวกรองแบบคาปาซิทีฟ: ก) วงจร ข) ไดอะแกรมเวลาของการทำงาน
เมื่อครึ่งคลื่นบวกไหลในช่วงเวลา t0 — t1 (รูปที่ 2.63, b) กระแสโหลด (กระแสไดโอด) และกระแสประจุตัวเก็บประจุตัวเก็บประจุถูกชาร์จและ ณ เวลา t1 แรงดันไฟฟ้าในตัวเก็บประจุเกินแรงดันตกของขดลวดทุติยภูมิ — ไดโอดจะปิดและในช่วงเวลา t1 — t2 กระแสในโหลดจะถูกจัดเตรียมโดยการคายประจุของตัวเก็บประจุ เช. กระแสในโหลดไหลอย่างต่อเนื่องซึ่งช่วยลดการกระเพื่อมของแรงดันไฟฟ้าที่แก้ไขได้อย่างมาก
ยิ่งความจุของตัวเก็บประจุ Cf มากเท่าใด แรงกระตุ้นก็จะยิ่งน้อยลงเท่านั้น สิ่งนี้ถูกกำหนดโดยเวลาคายประจุของตัวเก็บประจุ - ค่าคงที่ของเวลาคายประจุ τ = СfRн ที่ τ> 10 ค่าสัมประสิทธิ์การปรับให้เรียบถูกกำหนดโดยสูตร q = 2π fc m Cf Rn โดยที่ fc คือความถี่ของเครือข่าย m คือจำนวนครึ่งคาบของแรงดันไฟฟ้าที่แก้ไข
ขอแนะนำให้ใช้ตัวกรองแบบ capacitive ที่มีตัวต้านทานโหลด RH ที่มีความต้านทานสูงที่กำลังโหลดต่ำ
ตัวกรองอุปนัย (สำลัก) ต่ออนุกรมกับ Rn (รูปที่ 3, a) ตัวเหนี่ยวนำมีความต้านทานไฟฟ้ากระแสตรงต่ำและความต้านทานไฟฟ้ากระแสสลับสูง การทำให้ระลอกคลื่นเรียบขึ้นอยู่กับปรากฏการณ์ของการเหนี่ยวนำตัวเอง ซึ่งในขั้นต้นจะป้องกันไม่ให้กระแสเพิ่มขึ้น จากนั้นจึงรองรับด้วยการลดลง (รูปที่ 2, b)
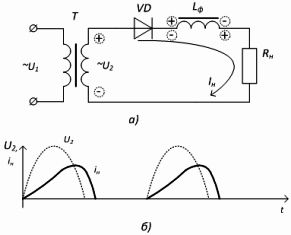
รูปที่ 2 วงจรเรียงกระแสครึ่งคลื่นเฟสเดียวพร้อมตัวกรองอุปนัย: ก) วงจร ข) ไดอะแกรมเวลาของการทำงาน
ตัวกรองแบบเหนี่ยวนำใช้ในวงจรเรียงกระแสที่มีกำลังปานกลางและสูง กล่าวคือ ในวงจรเรียงกระแสที่ทำงานด้วยกระแสโหลดสูง
ค่าสัมประสิทธิ์การปรับให้เรียบถูกกำหนดโดยสูตร: q = 2π fs m Lf / Rn
การทำงานของตัวกรอง capacitive และ inductive นั้นขึ้นอยู่กับข้อเท็จจริงที่ว่าในระหว่างการไหลของกระแสที่ใช้โดยเครือข่ายตัวเก็บประจุและตัวเหนี่ยวนำจะเก็บพลังงานและเมื่อไม่มีกระแสจากเครือข่ายหรือลดลง องค์ประกอบจะให้ การปิดพลังงานที่เก็บไว้ รักษากระแส (แรงดันไฟฟ้า) ในโหลด
ตัวกรองหลายทางแยกใช้คุณสมบัติการปรับให้เรียบของทั้งตัวเก็บประจุและตัวเหนี่ยวนำ ในวงจรเรียงกระแสพลังงานต่ำซึ่งความต้านทานของตัวต้านทานโหลดมีค่าหลาย kOhm แทนที่จะเป็นตัวทำให้หายใจไม่ออก Lf จะรวมตัวต้านทาน Rf ซึ่งช่วยลดมวลและขนาดของตัวกรองได้อย่างมาก
รูปที่ 3 แสดงประเภทของตัวกรองแลดเดอร์ LC และ RC
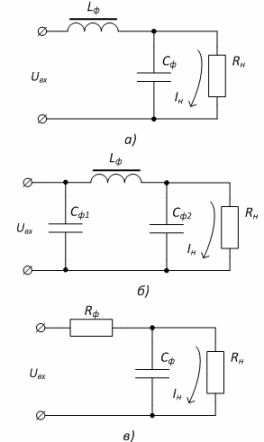
รูปที่ 3-ตัวกรองหลายทางแยก: a) LC รูปตัว L, b) LC รูปตัว U, c) ตัวกรอง RC
ตัวปรับเสถียรภาพได้รับการออกแบบมาเพื่อรักษาแรงดันคงที่ (กระแส) ของโหลดระหว่างความผันผวนของแรงดันไฟหลักและการเปลี่ยนแปลงของกระแสไฟฟ้าที่โหลดใช้
ตัวปรับความคงตัวแบ่งออกเป็นตัวปรับแรงดันและกระแสรวมถึงตัวปรับพารามิเตอร์และการชดเชย ความเสถียรของแรงดันเอาต์พุตถูกประเมินโดยปัจจัยความเสถียร Kst
ตัวปรับความคงตัวแบบพาราเมตริกขึ้นอยู่กับการใช้องค์ประกอบที่มีลักษณะไม่เป็นเชิงเส้น - ไดโอดซีเนอร์เซมิคอนดักเตอร์ แรงดันไฟฟ้าของ zener diode นั้นเกือบจะคงที่โดยมีการเปลี่ยนแปลงที่สำคัญในกระแสย้อนกลับผ่านอุปกรณ์
วงจรความคงตัวแบบพาราเมตริกแสดงในรูปที่ 4 แรงดันอินพุต UBX ถูกกระจายระหว่างตัวต้านทานจำกัด Rlim และไดโอดซีเนอร์ที่เชื่อมต่อแบบขนาน VD และตัวต้านทานโหลด Rn
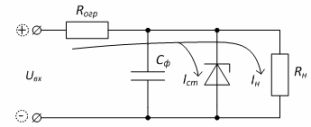
รูปที่ 4 — ตัวปรับเสถียรภาพพาราเมตริก
เมื่อแรงดันอินพุตเพิ่มขึ้น กระแสผ่านซีเนอร์ไดโอดจะเพิ่มขึ้น ซึ่งหมายความว่ากระแสผ่านตัวต้านทานจำกัดจะเพิ่มขึ้นและแรงดันตกคร่อมที่มากขึ้นจะเกิดขึ้น และแรงดันโหลดจะไม่เปลี่ยนแปลง
ตัวปรับความคงตัวแบบพาราเมตริกมีค่า Kst อยู่ที่ 20-50 ข้อเสียของความคงตัวประเภทนี้คือกระแสความเสถียรต่ำและมีประสิทธิภาพต่ำ
ตัวปรับความคงตัวแบบพาราเมตริกใช้เป็นแหล่งจ่ายแรงดันเสริม เช่นเดียวกับเมื่อกระแสโหลดมีขนาดเล็ก — ไม่เกินร้อยมิลลิแอมป์
ตัวปรับเสถียรภาพชดเชยใช้ความต้านทานผันแปรของทรานซิสเตอร์เป็นตัวต้านทานจำกัด เมื่อแรงดันอินพุตเพิ่มขึ้น ความต้านทานของทรานซิสเตอร์ก็จะเพิ่มขึ้นตามไปด้วย เมื่อแรงดันลดลง ความต้านทานก็จะลดลง ในกรณีนี้ แรงดันไฟฟ้าในโหลดจะไม่เปลี่ยนแปลง
วงจรความคงตัวของทรานซิสเตอร์แสดงในรูปที่ 5 หลักการของการควบคุมแรงดันเอาต์พุต URn ขึ้นอยู่กับการเปลี่ยนแปลงค่าการนำไฟฟ้าของทรานซิสเตอร์ควบคุม VT1
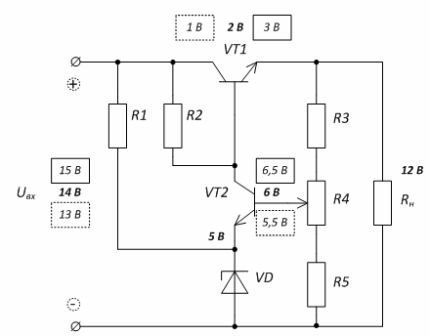
รูปที่ 5 — แผนผังของตัวควบคุมแรงดันไฟฟ้าชดเชย
วงจรเปรียบเทียบแรงดันไฟฟ้าและแอมพลิฟายเออร์ DC ประกอบบนทรานซิสเตอร์ VT2 วงจรการวัด R3, R4, R5 รวมอยู่ในวงจรฐาน และแหล่งจ่ายแรงดันอ้างอิง R1VD รวมอยู่ในวงจรอิมิตเตอร์
ตัวอย่างเช่น เมื่อแรงดันอินพุตเพิ่มขึ้น เอาต์พุตก็จะเพิ่มขึ้นเช่นกัน ซึ่งจะนำไปสู่การเพิ่มขึ้นของแรงดันไฟฟ้าที่ฐานของทรานซิสเตอร์ VT2 ในขณะเดียวกัน ศักยภาพของอีซีแอล VT2 จะยังคงเท่าเดิมสิ่งนี้จะนำไปสู่การเพิ่มขึ้นของกระแสฐานและด้วยเหตุนี้กระแสสะสมของทรานซิสเตอร์ VT2 - ศักยภาพฐานของทรานซิสเตอร์ VT1 จะลดลง ทรานซิสเตอร์จะปิดและแรงดันตกที่มากขึ้นจะเกิดขึ้นและแรงดันเอาต์พุตจะ ยังคงไม่เปลี่ยนแปลง
วันนี้มีการผลิตความคงตัวในรูปแบบของวงจรรวม รูปแบบทั่วไปสำหรับการเปิดโคลงในตัวแสดงในรูปที่ 6
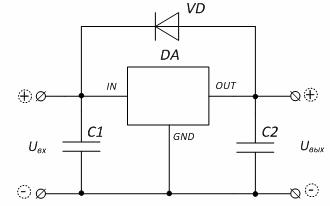
รูปที่ 6 — แผนผังทั่วไปสำหรับการเปิดเครื่องปรับแรงดันไฟฟ้าในตัว
การกำหนดเอาต์พุตของไมโครเซอร์กิตโคลง: «IN» — อินพุต, «OUT» — เอาต์พุต, «GND» — ทั่วไป (เคส) หากปรับโคลงได้ แสดงว่ามีเอาต์พุต «ADJ» — การปรับ
การเลือกโคลงจะขึ้นอยู่กับค่าของแรงดันขาออก กระแสโหลดสูงสุด และช่วงของการเปลี่ยนแปลงของแรงดันขาเข้า