Buck Converter — การปรับขนาดส่วนประกอบ
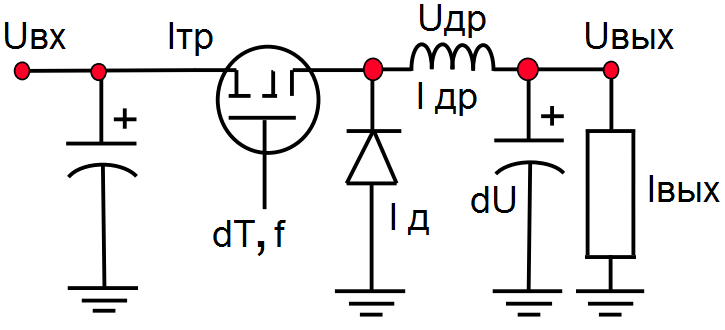
บทความนี้จะให้ขั้นตอนในการคำนวณและเลือกส่วนประกอบที่จำเป็นในการออกแบบส่วนพลังงานของตัวแปลง DC แบบ step-down ที่แยกด้วยไฟฟ้า โทโพโลยีของตัวแปลงบั๊ก คอนเวอร์เตอร์ของโทโพโลยีนี้เหมาะสำหรับแรงดันไฟฟ้ากระแสตรงแบบสเต็ปดาวน์ภายใน 50 โวลต์ที่อินพุตและที่กำลังโหลดไม่เกิน 100 วัตต์
ทุกอย่างที่เกี่ยวข้องกับการเลือกคอนโทรลเลอร์และวงจรไดรเวอร์รวมถึงประเภทของทรานซิสเตอร์ฟิลด์เอฟเฟกต์จะไม่อยู่ในขอบเขตของบทความนี้ แต่เราจะวิเคราะห์รายละเอียดวงจรและลักษณะของโหมดการทำงานของแต่ละโหมด ส่วนประกอบหลักของส่วนพลังงานของตัวแปลงประเภทนี้

เริ่มการพัฒนา ตัวแปลงพัลส์คำนึงถึงข้อมูลเริ่มต้นต่อไปนี้: ค่าแรงดันอินพุตและเอาต์พุต, กระแสโหลดคงที่สูงสุด, ความถี่สวิตชิ่งของทรานซิสเตอร์กำลัง (ความถี่การทำงานของคอนเวอร์เตอร์) รวมถึงคลื่นกระแสผ่านโช้ค นอกจากนี้ขึ้นอยู่กับ ข้อมูลเหล่านี้มาคำนวณ ตัวเหนี่ยวนำสำลักซึ่งจะให้พารามิเตอร์ที่จำเป็นความจุของตัวเก็บประจุเอาต์พุตรวมถึงคุณสมบัติของไดโอดย้อนกลับ
-
แรงดันไฟฟ้าขาเข้า — Uin, V
-
แรงดันขาออก — Uout, V
-
กระแสโหลดสูงสุด — Iout, A
-
ช่วงของกระแสกระเพื่อมผ่านโช้ค — Idr, A
-
ความถี่การสลับของทรานซิสเตอร์ — f, kHz
ตัวแปลงทำงานดังนี้ ในช่วงแรกของช่วงเวลาที่ทรานซิสเตอร์ปิด กระแสจะถูกจ่ายจากแหล่งพลังงานหลักผ่านตัวเหนี่ยวนำไปยังโหลดในขณะที่กำลังชาร์จตัวเก็บประจุตัวกรองเอาต์พุต เมื่อทรานซิสเตอร์เปิด กระแสโหลดจะถูกรักษาโดยประจุของตัวเก็บประจุและกระแสเหนี่ยวนำ ซึ่งไม่สามารถถูกขัดจังหวะได้ทันที และถูกปิดโดยไดโอดย้อนกลับ ซึ่งขณะนี้เปิดอยู่ในช่วงที่สองของช่วง
ตัวอย่างเช่น สมมติว่าเราจำเป็นต้องพัฒนาโทโพโลยีของตัวแปลงบั๊กที่ขับเคลื่อนด้วยแรงดันคงที่ 24 โวลต์ และที่เอาต์พุตเราต้องได้รับ 12 โวลต์ด้วยกระแสโหลดพิกัด 1 แอมป์ และเพื่อให้แรงดันไฟฟ้ากระเพื่อมที่ เอาต์พุตไม่เกิน 50 mV ให้ความถี่ในการทำงานของตัวแปลงเป็น 450 kHz และกระแสกระเพื่อมผ่านตัวเหนี่ยวนำไม่เกิน 30% ของกระแสโหลดสูงสุด
ข้อมูลเริ่มต้น:
-
อุ้ย = 24 V
-
ยูเอาท์ = 12V
-
ฉันออก = 1 A
-
ฉัน dr = 0.3 * 1 A = 0.3 A
-
f = 450 กิโลเฮิรตซ์
เนื่องจากเรากำลังพูดถึงตัวแปลงพัลส์ในระหว่างการใช้งานแรงดันไฟฟ้าจะไม่ถูกนำไปใช้กับโช้คอย่างต่อเนื่องโดยพัลส์จะถูกนำไปใช้อย่างแม่นยำระยะเวลาของส่วนบวกที่สามารถคำนวณ dT ตามความถี่การทำงานของ ตัวแปลงและอัตราส่วนของแรงดันขาเข้าและขาออกตามสูตรต่อไปนี้:
dT = Uout / (Uin * f),
โดยที่ Uout / Uin = DC คือรอบการทำงานของพัลส์ควบคุมทรานซิสเตอร์
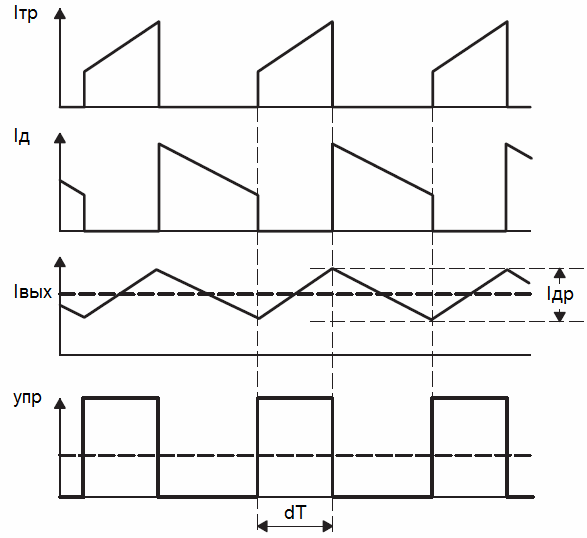
ระหว่างส่วนที่เป็นบวกของพัลส์สวิตชิ่ง แหล่งกำเนิดจ่ายพลังงานให้กับวงจรคอนเวอร์เตอร์ ในระหว่างส่วนที่เป็นลบของพัลส์ พลังงานที่ตัวเหนี่ยวนำเก็บไว้จะถูกถ่ายโอนไปยังวงจรเอาท์พุต
สำหรับตัวอย่างของเรา ปรากฎว่า dT = 1.11 μs - เวลาที่แรงดันไฟฟ้าอินพุตทำหน้าที่กับตัวเหนี่ยวนำกับตัวเก็บประจุและโหลดที่เชื่อมต่อระหว่างส่วนบวกของพัลส์
ตาม ด้วยกฎการเหนี่ยวนำแม่เหล็กไฟฟ้า, การเปลี่ยนแปลงของ Idr ปัจจุบันผ่านตัวเหนี่ยวนำ L (ซึ่งเป็นโช้ค) จะเป็นสัดส่วนกับแรงดันไฟฟ้า Udr ที่ใช้กับขั้วของขดลวดและเวลาของการใช้งาน dT (ระยะเวลาของส่วนบวกของพัลส์):
Udr = L * Idr / dT
แรงดันสำลัก Udr — ในกรณีนี้ไม่มีอะไรมากไปกว่าความแตกต่างระหว่างแรงดันอินพุตและเอาต์พุตในช่วงเวลานั้นเมื่อทรานซิสเตอร์อยู่ในสถานะนำไฟฟ้า:
Udr = Uin-Uout
และสำหรับตัวอย่างของเรา ปรากฎว่า Udr = 24 — 12 = 12 V — แอมพลิจูดของแรงดันไฟฟ้าที่ใช้กับโช้คในช่วงที่เป็นบวกของพัลส์การทำงาน
คันเร่ง

ตอนนี้เมื่อทราบขนาดของแรงดันไฟฟ้าที่ใช้กับโช้คอัพ Udr การตั้งเวลาของพัลส์การทำงาน dT บนโช้คเช่นเดียวกับค่าของกระแสกระเพื่อมสูงสุดที่อนุญาตของโช้ค Idr เราสามารถคำนวณค่าเหนี่ยวนำโช้คที่ต้องการได้ L :
L = Udr * dT / Idr
สำหรับตัวอย่างของเรา ปรากฎว่า L = 44.4 μH — ค่าความเหนี่ยวนำขั้นต่ำของโช้คทำงาน ซึ่งในช่วงเวลาที่กำหนดของส่วนบวกของพัลส์ควบคุม dT การแกว่งของคลื่นจะไม่เกิน Idr
คอนเดนเซอร์
เมื่อกำหนดค่าความเหนี่ยวนำของโช้คให้ดำเนินการเลือกความจุของตัวเก็บประจุเอาต์พุตของตัวกรอง กระแสกระเพื่อมผ่านตัวเก็บประจุจะเท่ากับกระแสกระเพื่อมผ่านตัวเหนี่ยวนำ ดังนั้น การละเลยความต้านทานของตัวนำอุปนัยและความเหนี่ยวนำของตัวเก็บประจุ เราจึงใช้สูตรต่อไปนี้เพื่อค้นหาความจุขั้นต่ำที่ต้องการของตัวเก็บประจุ:
C = dT * Idr / dU
โดยที่ dU คือระลอกของแรงดันไฟฟ้าทั่วตัวเก็บประจุ
รับค่าของคลื่นแรงดันไฟฟ้าในตัวเก็บประจุเท่ากับ dU = 0.050 V สำหรับตัวอย่างของเรา เราจะได้ C = 6.66 μF ซึ่งเป็นความจุขั้นต่ำของตัวเก็บประจุเอาต์พุตของตัวกรอง
ไดโอด

ในที่สุดก็ยังคงกำหนดพารามิเตอร์ของไดโอดทำงาน กระแสไหลผ่านไดโอดเมื่อแรงดันไฟฟ้าอินพุตถูกตัดการเชื่อมต่อจากตัวเหนี่ยวนำ นั่นคือ ในส่วนที่สองของพัลส์ปฏิบัติการ:
Id = (1 -DC) * Iout — กระแสเฉลี่ยผ่านไดโอดเมื่อเปิดและนำไฟฟ้า
สำหรับตัวอย่างของเรา Id = (1 -Uout / Uin) * Iout = 0.5 A — คุณสามารถเลือก Schottky diode สำหรับกระแส 1 A ที่มีแรงดันย้อนกลับสูงสุดที่มากกว่าอินพุตนั่นคือประมาณ 30 โวลต์