วิธีกราฟิกในการแสดงกระแสสลับ
ข้อเท็จจริงพื้นฐานของตรีโกณมิติ
 การเรียนรู้ AC นั้นยากมากหากนักเรียนยังไม่เข้าใจข้อมูลพื้นฐานของตรีโกณมิติ ดังนั้นข้อกำหนดพื้นฐานของตรีโกณมิติซึ่งอาจจำเป็นในอนาคตเราได้ให้ไว้ในตอนต้นของบทความนี้
การเรียนรู้ AC นั้นยากมากหากนักเรียนยังไม่เข้าใจข้อมูลพื้นฐานของตรีโกณมิติ ดังนั้นข้อกำหนดพื้นฐานของตรีโกณมิติซึ่งอาจจำเป็นในอนาคตเราได้ให้ไว้ในตอนต้นของบทความนี้
เป็นที่ทราบกันดีอยู่แล้วว่าในทางเรขาคณิต เป็นเรื่องปกติที่จะเรียกด้านที่อยู่ตรงข้ามมุมฉากว่าด้านตรงข้ามมุมฉากเมื่อพิจารณารูปสามเหลี่ยมมุมฉาก ด้านที่อยู่ติดกันเป็นมุมฉากเรียกว่าขา มุมฉากคือ 90° ดังนั้นในรูป 1 ด้านตรงข้ามมุมฉากคือด้านที่ระบุด้วยตัวอักษร O ขาคือด้าน ab และ aO
ในรูปสังเกตว่ามุมฉากคือ 90 ° ส่วนอีกสองมุมของสามเหลี่ยมเป็นแบบเฉียบพลันและระบุด้วยตัวอักษร α (alpha) และ β (beta)
หากคุณวัดด้านของสามเหลี่ยมในระดับหนึ่งและใช้อัตราส่วนของขนาดของขาตรงข้ามมุม α กับค่าของด้านตรงข้ามมุมฉาก อัตราส่วนนี้เรียกว่าไซน์ของมุม α ไซน์ของมุมมักจะเขียนแทนด้วย sin α ดังนั้น เรากำลังพิจารณาในรูปสามเหลี่ยมมุมฉาก ไซน์ของมุมคือ:

หากคุณสร้างอัตราส่วนโดยใช้ค่าของขา aO ซึ่งอยู่ติดกับมุมแหลม α กับด้านตรงข้ามมุมฉาก อัตราส่วนนี้เรียกว่าโคไซน์ของมุม α โคไซน์ของมุมมักจะแสดงดังนี้: cos α . ดังนั้น โคไซน์ของมุม a เท่ากับ:

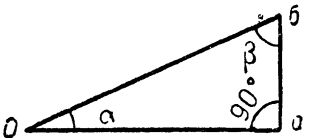
ข้าว. 1. สามเหลี่ยมมุมฉาก
เมื่อทราบไซน์และโคไซน์ของมุม α คุณสามารถกำหนดขนาดของขาได้ ถ้าเราคูณค่าของด้านตรงข้ามมุมฉาก O ด้วย sin α เราจะได้ leg ab คูณด้านตรงข้ามมุมฉากด้วย cos α เราจะได้ขา Oa
สมมติว่ามุมอัลฟาไม่คงที่ แต่ค่อย ๆ เปลี่ยนแปลงเพิ่มขึ้น เมื่อมุมเป็นศูนย์ ไซน์ของมันก็เป็นศูนย์เช่นกัน เนื่องจากพื้นที่ตรงข้ามมุมขาเป็นศูนย์
เมื่อมุม a เพิ่มขึ้น ไซน์ของมันจะเริ่มเพิ่มขึ้นด้วย ค่าไซน์ที่ใหญ่ที่สุดจะได้รับเมื่อมุมอัลฟ่ากลายเป็นเส้นตรง นั่นคือจะเท่ากับ 90 ° ในกรณีนี้ ไซน์เท่ากับเอกภาพ ดังนั้น ไซน์ของมุมสามารถมีค่าน้อยที่สุดได้ — 0 และค่ามากที่สุด — 1 สำหรับค่ากลางทั้งหมดของมุม ไซน์เป็นเศษส่วนที่เหมาะสม
โคไซน์ของมุมจะมากที่สุดเมื่อมุมเป็นศูนย์ ในกรณีนี้โคไซน์เท่ากับเอกภาพเนื่องจากขาที่อยู่ติดกับมุมและด้านตรงข้ามมุมฉากในกรณีนี้จะตรงกันและส่วนที่แสดงโดยพวกมันจะเท่ากัน เมื่อมุม 90 ° โคไซน์ของมันคือศูนย์
วิธีกราฟิกในการแสดงกระแสสลับ
กระแสสลับไซน์ หรือแรงเคลื่อนไฟฟ้าแปรผันตามเวลาสามารถลงจุดเป็นคลื่นไซน์ได้ การเป็นตัวแทนประเภทนี้มักใช้ในวิศวกรรมไฟฟ้า นอกจากการแสดงกระแสสลับในรูปของคลื่นไซน์แล้ว การแสดงกระแสในรูปของเวกเตอร์ยังใช้กันอย่างแพร่หลายอีกด้วย
เวกเตอร์เป็นปริมาณที่มีความหมายและทิศทางเฉพาะ ค่านี้จะแสดงเป็นส่วนของเส้นตรงโดยมีลูกศรอยู่ที่ส่วนท้าย ลูกศรควรระบุทิศทางของเวกเตอร์ และส่วนที่วัดในระดับที่กำหนดจะให้ขนาดของเวกเตอร์
เฟสทั้งหมดของกระแสสลับไซน์ในหนึ่งช่วงเวลาสามารถแสดงโดยใช้เวกเตอร์ที่แสดงดังต่อไปนี้ สมมติว่าจุดกำเนิดของเวกเตอร์อยู่ที่ศูนย์กลางของวงกลม และจุดสิ้นสุดอยู่ที่วงกลมนั้น เวกเตอร์ที่หมุนทวนเข็มนาฬิกานี้ทำการปฏิวัติอย่างสมบูรณ์ในเวลาที่สอดคล้องกับช่วงหนึ่งของการเปลี่ยนแปลงในปัจจุบัน
ให้เราวาดจากจุดที่กำหนดจุดกำเนิดของเวกเตอร์ นั่นคือจากจุดศูนย์กลางของวงกลม O เส้นสองเส้น: เส้นหนึ่งแนวนอนและอีกเส้นหนึ่งแนวตั้ง ดังแสดงในรูป
หากแต่ละตำแหน่งของเวกเตอร์หมุนจากจุดสิ้นสุดซึ่งแสดงด้วยตัวอักษร A เราลดเส้นตั้งฉากลงเป็นเส้นแนวตั้ง จากนั้นส่วนของเส้นนี้จากจุด O ถึงฐานของเส้นตั้งฉาก a จะให้ค่าทันที ของกระแสสลับไซน์และเวกเตอร์ OA เองในระดับหนึ่งแสดงถึงแอมพลิจูดของกระแสนี้นั่นคือค่าสูงสุดของมัน ส่วน Oa ตามแกนตั้งเรียกว่าเส้นโครงของเวกเตอร์ OA บนแกน y
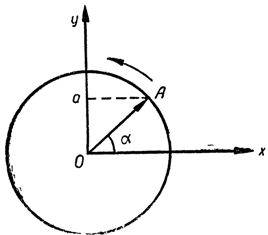
ข้าว. 2. ภาพการเปลี่ยนแปลงของกระแสไซน์โดยใช้เวกเตอร์
การตรวจสอบความถูกต้องของสิ่งข้างต้นไม่ใช่เรื่องยากโดยดำเนินการก่อสร้างดังต่อไปนี้ ใกล้วงกลมในรูป คุณจะได้คลื่นไซน์ที่สอดคล้องกับการเปลี่ยนแปลงในตัวแปร emf ในช่วงหนึ่งหากวาดองศาตามเส้นแนวนอนที่กำหนดเฟสของการเปลี่ยนแปลงใน EMF และในทิศทางแนวตั้งให้สร้างส่วนที่เท่ากับขนาดของเส้นโครงของเวกเตอร์ OA บนแกนตั้งหลังจากดำเนินการก่อสร้างดังกล่าวสำหรับทุกจุดของวงกลมซึ่งจุดสิ้นสุดของสไลด์เวกเตอร์ OA เราได้รูปที่ 3.
ระยะเวลาเต็มของการเปลี่ยนแปลงปัจจุบันและตามด้วยการหมุนของเวกเตอร์ที่แสดงถึงการเปลี่ยนแปลงนั้นสามารถแสดงได้ไม่เพียง แต่ในองศาของวงกลมเท่านั้น แต่ยังรวมถึงเรเดียนด้วย
มุมหนึ่งองศาสอดคล้องกับ 1/360 ของวงกลมที่อธิบายโดยจุดยอดของมัน การวัดมุมนี้หรือมุมนั้นเป็นองศาหมายถึงการหาจำนวนมุมพื้นฐานที่มีอยู่ในมุมที่วัดได้
อย่างไรก็ตาม เมื่อทำการวัดมุม คุณสามารถใช้เรเดียนแทนองศาได้ ในกรณีนี้ หน่วยที่ใช้เปรียบเทียบมุมหนึ่งหรืออีกมุมหนึ่งคือมุมที่ส่วนโค้งสอดคล้องกัน โดยมีความยาวเท่ากับรัศมีของวงกลมแต่ละวงที่อธิบายโดยจุดยอดของมุมที่วัดได้
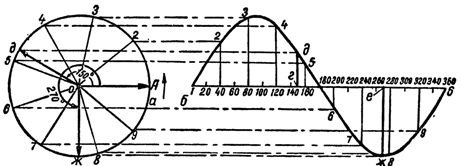
ข้าว. 3. การสร้างไซน์ไซด์ EMF ที่เปลี่ยนแปลงตามกฎฮาร์มอนิก
ดังนั้น มุมรวมที่สอดคล้องกับวงกลมแต่ละวงซึ่งวัดเป็นองศาคือ 360 ° มุมนี้วัดเป็นเรเดียน เท่ากับ 2 π — 6.28 เรเดียน
ตำแหน่งของเวกเตอร์ ณ ช่วงเวลาหนึ่งสามารถประมาณได้จากความเร็วเชิงมุมของการหมุนและตามเวลาที่ผ่านไปตั้งแต่จุดเริ่มต้นของการหมุน นั่นคือตั้งแต่ต้นช่วงเวลา ถ้าเราระบุความเร็วเชิงมุมของเวกเตอร์ด้วยตัวอักษร ω (โอเมก้า) และเวลาตั้งแต่ต้นช่วงเวลาด้วยตัวอักษร t ดังนั้นมุมของการหมุนของเวกเตอร์ที่เกี่ยวกับตำแหน่งเริ่มต้นสามารถกำหนดเป็นผลคูณได้ :

มุมของการหมุนของเวกเตอร์กำหนดเฟสซึ่งสอดคล้องกับอย่างใดอย่างหนึ่ง ค่าปัจจุบันทันที… ดังนั้น มุมการหมุนหรือมุมเฟสช่วยให้เราสามารถประมาณค่าชั่วขณะของกระแสในช่วงเวลาที่เราสนใจได้ มุมเฟสมักเรียกง่ายๆ ว่าเฟส
ด้านบนแสดงไว้ว่ามุมของการหมุนของเวกเตอร์โดยสมบูรณ์ ซึ่งแสดงเป็นเรเดียนนั้นมีค่าเท่ากับ 2π การหมุนเวกเตอร์ที่สมบูรณ์นี้สอดคล้องกับช่วงเวลาหนึ่งกระแสสลับ การคูณความเร็วเชิงมุม ω ตามเวลา T ที่สอดคล้องกับช่วงเวลาหนึ่ง เราจะได้การหมุนที่สมบูรณ์ของเวกเตอร์กระแสสลับ ซึ่งแสดงเป็นเรเดียน

ดังนั้นจึงไม่ยากที่จะระบุว่าความเร็วเชิงมุม ω เท่ากับ:

แทนที่ช่วงเวลา T ด้วยอัตราส่วน 1 / f เราได้รับ:

ความเร็วเชิงมุม ω ตามความสัมพันธ์ทางคณิตศาสตร์นี้มักเรียกว่าความถี่เชิงมุม
แผนภาพเวกเตอร์
หากไม่มีกระแสใดกระแสหนึ่งทำหน้าที่ในวงจรไฟฟ้ากระแสสลับ แต่สองกระแสขึ้นไป ความสัมพันธ์ซึ่งกันและกันจะแสดงเป็นภาพกราฟิกได้อย่างสะดวก การแสดงปริมาณทางไฟฟ้าแบบกราฟิก (กระแส แรงเคลื่อนไฟฟ้า และแรงดัน) สามารถทำได้สองวิธี หนึ่งในวิธีการเหล่านี้คือการพล็อตไซน์ซอยด์ที่แสดงทุกช่วงของการเปลี่ยนแปลงของปริมาณทางไฟฟ้าในช่วงเวลาหนึ่ง ในรูปนี้ คุณจะเห็นก่อนอื่น อัตราส่วนของค่าสูงสุดของกระแสที่ตรวจสอบคืออะไร emf และความเครียด
ในรูป 4 แสดงไซน์ซอยด์สองตัวที่แสดงลักษณะการเปลี่ยนแปลงของกระแสสลับ 2 กระแส กระแสเหล่านี้มีช่วงเวลาเดียวกันและอยู่ในเฟส
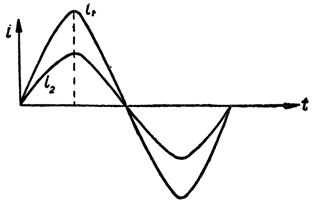
ข้าว. 4. กระแสไซน์ในเฟส
I1 ปัจจุบันมีแอมพลิจูดสูงกว่า I2 ปัจจุบัน อย่างไรก็ตาม กระแสหรือแรงดันอาจไม่อยู่ในเฟสเสมอไป บ่อยครั้งที่มันเกิดขึ้นว่าขั้นตอนของพวกเขาแตกต่างกัน ในกรณีนี้พวกเขาจะบอกว่าไม่อยู่ในเฟส ในรูป 5 แสดงไซน์ไซด์ของกระแสเปลี่ยนเฟสสองเฟส
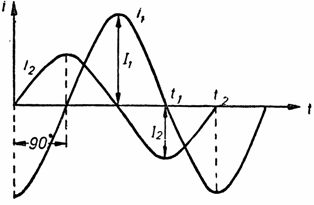
ข้าว. 5. ไซน์ไซด์ของกระแสเปลี่ยนเฟส 90 °
มุมเฟสระหว่างพวกเขาคือ 90 °ซึ่งเป็นหนึ่งในสี่ของช่วงเวลารูปแสดงให้เห็นว่าค่าสูงสุดของ I2 ปัจจุบันเกิดขึ้นเร็วกว่าหนึ่งในสี่ของช่วงเวลากว่าค่าสูงสุดของ I1 ปัจจุบัน I2 ปัจจุบันนำไปสู่เฟส I1 ในช่วงเวลาหนึ่งในสี่นั่นคือ 90 ° ความสัมพันธ์เดียวกันระหว่างกระแสสามารถอธิบายได้โดยใช้เวกเตอร์
ในรูป 6 แสดงเวกเตอร์สองตัวที่มีกระแสเท่ากัน หากเราจำได้ว่าทิศทางการหมุนของเวกเตอร์ตกลงที่จะหมุนทวนเข็มนาฬิกา ก็จะเห็นได้ชัดว่าเวกเตอร์ I2 ปัจจุบันหมุนในทิศทางปกติก่อนหน้าเวกเตอร์ I1 ปัจจุบัน I2 ปัจจุบันนำไปสู่ I1 ปัจจุบัน ตัวเลขเดียวกันนี้แสดงให้เห็นว่ามุมนำคือ 90 ° มุมนี้คือมุมเฟสระหว่าง I1 และ I2 มุมเฟสแสดงด้วยตัวอักษร φ (phi) วิธีการแสดงปริมาณทางไฟฟ้าโดยใช้เวกเตอร์นี้เรียกว่าแผนภาพเวกเตอร์
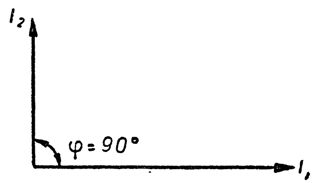
ข้าว. 6. แผนภาพเวกเตอร์ของกระแสเฟสเลื่อน 90 °
เมื่อวาดไดอะแกรมเวกเตอร์ ไม่จำเป็นต้องพรรณนาวงกลมที่ส่วนท้ายของเวกเตอร์เลื่อนในกระบวนการหมุนในจินตนาการ
การใช้ไดอะแกรมเวกเตอร์เราต้องไม่ลืมว่ามีเพียงปริมาณทางไฟฟ้าที่มีความถี่เท่ากันนั่นคือความเร็วเชิงมุมของการหมุนของเวกเตอร์เท่านั้นที่สามารถอธิบายได้ในแผนภาพเดียว