แหล่งที่มาและเครือข่ายของกระแสไฟฟ้าสลับและแก้ไข
 เพื่อลดต้นทุนของอุปกรณ์ไฟฟ้าและลดความซับซ้อนของการทำงานที่สถานีย่อยได้ถึง 110 kV พวกเขาใช้กระแสสลับและกระแสตรง เป็นแหล่งกำเนิดของไฟฟ้ากระแสสลับ หม้อแปลงเสริมกำลังต่ำแบบธรรมดาหรือแบบพิเศษ ตลอดจนหม้อแปลงวัดกระแสและแรงดัน
เพื่อลดต้นทุนของอุปกรณ์ไฟฟ้าและลดความซับซ้อนของการทำงานที่สถานีย่อยได้ถึง 110 kV พวกเขาใช้กระแสสลับและกระแสตรง เป็นแหล่งกำเนิดของไฟฟ้ากระแสสลับ หม้อแปลงเสริมกำลังต่ำแบบธรรมดาหรือแบบพิเศษ ตลอดจนหม้อแปลงวัดกระแสและแรงดัน
วงจรควบคุมและสัญญาณสามารถจ่ายไฟจากเครือข่ายเสริมของสถานีย่อยหรือจากหม้อแปลงไฟฟ้าพลังงานต่ำพิเศษที่เชื่อมต่อกับบัสบาร์ขนาด 6 หรือ 10 kV ที่ด้านจ่ายไฟ (ถัดจากสวิตช์)
แหล่งที่มาของกระแสสลับและกระแสไฟที่แก้ไขซึ่งแตกต่างจากแบตเตอรี่ พวกมันไม่เป็นอิสระเนื่องจากการทำงานเป็นไปได้เฉพาะเมื่อมีแรงดันไฟฟ้าในเครือข่ายเท่านั้น ดังนั้นจึงมีการกำหนดข้อกำหนดพิเศษในวงจรแหล่งจ่ายไฟเพื่อเพิ่มความน่าเชื่อถือของการทำงาน: วงจรการทำงานจะต้องใช้พลังงานจากหม้อแปลงอย่างน้อยสองตัว, แรงดันไฟฟ้าในวงจรทุติยภูมิจะต้องเสถียร, วงจรทุติยภูมิจะต้องแยกออกจาก วงจร น.
ต้องจ่ายไฟให้กับเครื่องรับไฟฟ้าที่สำคัญที่สุดด้วยอุปกรณ์จ่ายไฟสำรองอัตโนมัติ (ATS) ที่ใช้งานอยู่ในปัจจุบัน
ในรูป 1 แสดงวงจรจ่ายของวงจรปฏิบัติการ AC ของหม้อแปลงสองตัว TSH1 และ TSH2 เครื่องรับไฟฟ้าที่สำคัญที่สุดจะถูกจัดสรรให้กับบัสบาร์พิเศษของ SHOP ซึ่งจ่ายไฟโดยสวิตช์ไฟสำรองอัตโนมัติ (ATS)
บัสควบคุม SHU และการส่งสัญญาณ SHS ได้รับพลังงานจากบัส SHOP ผ่านตัวปรับเสถียรภาพ CT1, CT2 เพื่อให้ความผันผวนของแรงดันไฟฟ้าในวงจรมีผลกระทบต่อการทำงานของวงจรควบคุมและสัญญาณน้อยลง แม่เหล็กไฟฟ้าสำหรับเปิดสวิตช์น้ำมันขับเคลื่อนโดยวงจรเรียงกระแส VU1 และ VU2 ซึ่งเชื่อมต่อกับส่วนต่าง ๆ ของแผงวงจร
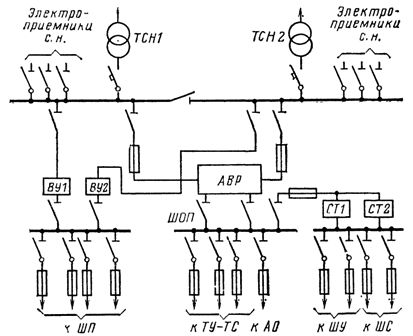
ข้าว. 1. วงจรแหล่งจ่ายไฟสำหรับวงจรการทำงานของกระแสสลับ: TCH1, TСН2 - หม้อแปลง p.n., AVR - สวิตช์ถ่ายโอนอัตโนมัติ, ST1, ST2 - ตัวปรับแรงดันไฟฟ้า, VU1, VU2 - วงจรเรียงกระแส, SHU, SHP, SHS - ควบคุม , บัสบาร์กำลังและสัญญาณ , AO — ไฟฉุกเฉิน TU — TS — การควบคุมระยะไกลและการส่งสัญญาณระยะไกล, SHOP — ยางสำหรับผู้บริโภคที่มีความรับผิดชอบ
ในด้านแรงดันไฟฟ้าที่ถูกแก้ไข VU1 และ VU2 จะทำงานบนบัสทั่วไปหากการติดตั้งใช้สวิตช์กับสปริงไดรฟ์ (PP-67 ฯลฯ ) ที่ทำงานด้วยไฟฟ้ากระแสสลับ วงจรจะเปลี่ยนตาม: วงจรเรียงกระแสจะปิด แม่เหล็กไฟฟ้าสวิตชิ่งจะได้รับพลังงานจากบัสบาร์ ShU เนื่องจากการสลับแม่เหล็กไฟฟ้าของไดรฟ์ดังกล่าวทำ ไม่ต้องใช้กำลังสูง เนื่องจากสปริงขับเคลื่อนแบบขดล่วงหน้าจะทำหน้าที่ยึดเกาะ
นอกจากหม้อแปลงไฟฟ้าที่ใช้งานทั่วไปแล้ว หม้อแปลงพิเศษยังใช้ในการจ่ายไฟให้กับวงจรทุติยภูมิ ตัวอย่างเช่นหม้อแปลง TM-2/10 ที่มีกำลังไฟ 2 kVA แรงดันไฟฟ้า 6 หรือ 10 kV ที่ด้านบนและ 230 V ที่ด้านล่างใช้เพื่อจ่ายวงจรควบคุมของสถานีย่อย
วัดกระแสหม้อแปลง (CT) และแรงดันไฟฟ้า (VT) ยังใช้เป็นแหล่งจ่ายกระแสสลับและจ่ายกระแสสลับไปยังวงจรเรียงกระแสในระบบปฏิบัติการกระแสตรง
อุปกรณ์และรีเลย์หลายตัวสามารถเชื่อมต่อแบบอนุกรมกับขดลวดทุติยภูมิของ TT
ข้อผิดพลาดของ CT และค่าของโหลดรองนั้นสัมพันธ์กันอย่างใกล้ชิด เมื่อโหลดเพิ่มขึ้น ข้อผิดพลาดของ CT จะเพิ่มขึ้น ดังนั้นโหลดรองสำหรับ CT ไม่ควรเกินค่าที่อนุญาตซึ่งรับประกันระดับความแม่นยำที่สอดคล้องกัน
ลักษณะเฉพาะของการทำงานของ CT ที่ป้อนวงจรกระแสไฟทำงานผ่านวงจรเรียงกระแสคือโหลดในโหมดนี้มากกว่าเมื่อจ่ายไฟให้กับวงจรป้องกันและการวัดเท่านั้น ดังนั้น แกน CT จึงทำงานในโหมดความอิ่มตัว ซึ่งทำให้โหมดการทำงานระบายความร้อนลดลง
การตรวจสอบข้อผิดพลาด CT สำหรับการโหลดแบบไม่เชิงเส้นนั้นดำเนินการเช่นเดียวกับแบบเชิงเส้นตามเส้นโค้งของขีด จำกัด ทวีคูณของกระแสทุติยภูมิ ความแตกต่างอยู่ในความจริงที่ว่าเส้นโค้งของการพึ่งพากระแสทุติยภูมิบนโหลดจะต้องอยู่ต่ำกว่าเส้นโค้งของหลายหลากที่อนุญาต (1) ในช่วงทั้งหมดของการเปลี่ยนแปลงของกระแสจากศูนย์ถึงหลายหลากที่คำนวณได้ (รูปที่ 2 ).
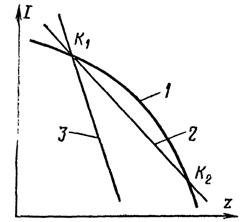
ข้าว. 2. เส้นโค้งของข้อผิดพลาดที่อนุญาตของ CT ที่มีโหลดแบบไม่เชิงเส้น: 1 — เส้นโค้งของขีดจำกัดหลายหลาก, 2, 3 — ลักษณะของโหลดแบบไม่เชิงเส้น, K1, K2 — ค่าสัมประสิทธิ์ความอิ่มตัวของหม้อแปลงกระแส
เส้นโค้งที่แสดงในรูปนี้แสดงให้เห็นว่าโหลดที่สอดคล้องกับเส้นโค้ง 2 ที่หลายหลาก K2 เกินกว่าค่าที่อนุญาต และเส้นโค้ง 3 ที่สอดคล้องกันจะไม่ทำให้ค่าความผิดพลาด CT เพิ่มขึ้นเกินกว่าค่าที่อนุญาต 10% ดังนั้น CT นี้สามารถใช้เพื่อจ่ายโหลดคุณลักษณะ 3 เท่านั้น
ในหลายกรณี CT ถูกใช้เป็นแหล่งกระแสไฟฟ้าในการทำงานเท่านั้น เช่น เมื่อป้อนบล็อกกระแส BDC ในกรณีเหล่านี้ ความแม่นยำของ CT ไม่ได้มีข้อกำหนดสูง ในเวลาเดียวกัน พลังงานที่จ่ายจากหม้อแปลงจะต้องเพียงพอสำหรับการทำงานของอุปกรณ์ทุติยภูมิที่จ่ายโดยกระแสไฟฟ้าที่แก้ไข การพึ่งพากำลังขับของ CT กับกระแสปฐมภูมิจะแสดงในรูปที่ 3.
วงจรทุติยภูมิของ VT ต้องได้รับการออกแบบเพื่อให้การสูญเสียแรงดันไฟฟ้าของแผงป้องกัน ระบบอัตโนมัติ และอุปกรณ์การวัดอยู่ในช่วง 1.5 ถึง 3% และสำหรับพลังงานที่ใช้งานและปฏิกิริยาที่คำนวณได้ - ไม่เกิน 0.5% . เช่นเดียวกับหม้อแปลงกระแส ระดับความแม่นยำของ VT ขึ้นอยู่กับโหลดของวงจรทุติยภูมิ
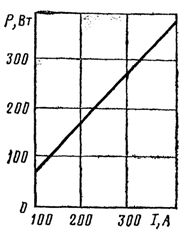
ข้าว. 3. การพึ่งพาพลังงานที่จ่ายโดย CT กับกระแสหลัก
ในรูป 4 แสดงการขึ้นต่อกันซึ่งแสดงว่าโหลดใดสอดคล้องกับความแม่นยำของ VT คลาสหนึ่งหรืออีกคลาสหนึ่ง
อย่างไรก็ตาม VT สามารถทำงานกับโหลดที่มากกว่าที่กำหนดได้ แต่ในกรณีนี้ต้องจำกัดโหลดเพื่อไม่ให้ความผิดพลาดของ VT นำไปสู่การทำงานที่ไม่ถูกต้องของการป้องกันรีเลย์และระบบอัตโนมัติ โดยทั่วไปแล้ว VTs ที่ป้อนเฉพาะการป้องกันรีเลย์และวงจรอัตโนมัติจะทำงานในระดับความแม่นยำ 3
วงจรเรียงกระแสเซมิคอนดักเตอร์และอุปกรณ์จ่ายไฟแบบพิเศษต่างๆ ใช้เป็นแหล่งกำเนิดกระแสตรงแบบเรียงกระแส แหล่งกำเนิดไฟฟ้ากระแสตรงสามารถแบ่งออกเป็นสามกลุ่มหลัก:
-
แหล่งชาร์จแบตเตอรี่และแหล่งชาร์จ
-
แหล่งที่มาของกระแสการทำงาน วงจรจ่ายไฟสำหรับการควบคุมและการส่งสัญญาณ
-
แหล่งที่มีไว้สำหรับจ่ายไฟให้กับแม่เหล็กไฟฟ้าสำหรับการเปิดสวิตช์น้ำมัน
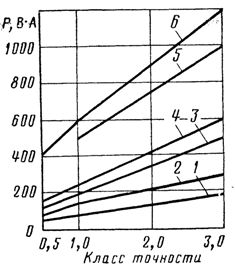
ข้าว. 4. การพึ่งพาคลาสความแม่นยำ TN ในการโหลด: 1-NOM-6, 2-NOM-10, NTMI-6-66, NTMK-b-48, 3-NTMI-10-66, NTMK-10, 4-NOM-35-66, 5-NKF-330, NKF-400, NKF-500, 6-NKF-110-57, NKF-220-55, NKF-110-48
ตัวเก็บประจุแบบพรีชาร์จควรถูกจัดประเภทเป็นแหล่งจ่ายกระแสด้วย เนื่องจากพวกมันถูกชาร์จผ่านวงจรเรียงกระแสที่ป้อนจากแหล่งไฟฟ้ากระแสสลับ
วงจรเรียงกระแสใช้ในการชาร์จและรีชาร์จแบตเตอรี่: VAZP, RTAB-4, VAZ, VSS, VSA, VU เป็นต้น
ในรูป แผนภาพบล็อกการส่งสัญญาณ 5 ของเรกูเลเตอร์ RTAB-4 ใช้ในสถานีย่อย Mosenergo และเป็นเครื่องชาร์จเซมิคอนดักเตอร์วงจรเรียงกระแสซึ่งแรงดันเอาต์พุตจะคงที่โดยอัตโนมัติตามการตั้งค่าที่ระบุ
อุปกรณ์ได้รับการออกแบบให้ทำงานร่วมกับแบตเตอรี่แบบชาร์จไฟได้ในโหมดการชาร์จ ตัวควบคุม RTAB-4 ครอบคลุมโหลด DC ของสถานีย่อย ตลอดจนการปลดปล่อยตัวเองตามธรรมชาติ ในขณะที่ให้เสถียรภาพของแรงดันและกระแสที่ระบุ
ประกอบด้วยตัวควบคุมแรงดันไฟฟ้า 2 ตัว ได้แก่ ตัวปรับแรงดันไฟฟ้าหลักและตัวรอง ซึ่งทำงานเป็นอิสระจากกันและทำหน้าที่ควบคุมองค์ประกอบหลักและรองของแบตเตอรี่ การควบคุมแรงดันเอาต์พุตในแต่ละตัวควบคุมนั้นดำเนินการโดยวงจรควบคุมของมันเอง (บล็อกการวัด IB และบล็อกควบคุม CU) ซึ่งทำหน้าที่ในวงจรเรียงกระแสของวงจรไฟฟ้า
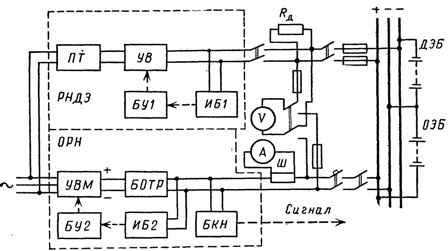
ข้าว. 5. บล็อกไดอะแกรมของตัวควบคุม RTAB -4: RNDE - ตัวควบคุมแรงดันไฟฟ้าขององค์ประกอบเพิ่มเติม, ORN - ตัวควบคุมแรงดันไฟฟ้าหลัก, DC - หม้อแปลงระดับกลาง, วงจรเรียงกระแสที่ควบคุมด้วย UV, BU1, BU2 - บล็อกควบคุม, IB1, IB2 - หน่วยการวัด , UVM — วงจรเรียงกระแสแบบควบคุม, BOTR — ตัวจำกัดกระแสควบคุม, BKN — หน่วยควบคุมแรงดันไฟฟ้า, SEB — เซลล์แบตเตอรี่หลัก, BPA — เซลล์แบตเตอรี่เพิ่มเติม, ถ — ความต้านทานโหลดของเซลล์เพิ่มเติม, W — การแบ่ง
ระดับแรงดันไฟฟ้าในบัส DC ถูกควบคุมโดยหน่วย BKN พิเศษ ซึ่งจะส่งสัญญาณเมื่อแรงดันไฟฟ้าลดลงหรือเพิ่มขึ้น 10% ของการตั้งค่าที่ระบุ ตัวควบคุมหลักติดตั้งตัวจำกัดกระแสเอาต์พุต BOTR สำหรับการป้องกันการโอเวอร์โหลดในกรณีที่วงจร DC ล้มเหลวและการทำงานของแบตเตอรี่ต่ำ
ตัวควบคุม RTAB-4 ทำงานด้วยการระบายความร้อนด้วยอากาศตามธรรมชาติที่ -5– + 30 ° C แรงดันไฟฟ้าของแหล่งจ่ายคือกระแสสลับสามเฟส 220 หรือ 380 V แรงดันไฟฟ้าแก้ไขเล็กน้อยที่เอาต์พุตของตัวควบคุมคือ 220 V เอาต์พุตเล็กน้อย ปัจจุบันคือ -50 A, ช่วงของการตั้งค่าขีดจำกัดกระแสเอาต์พุต 40-80 A, ความแม่นยำในการควบคุม ± 2%
ตัวควบคุมแรงดันไฟฟ้าสำหรับองค์ประกอบเพิ่มเติมผลิตขึ้นในสองเวอร์ชัน: สำหรับ 20-40 และ 40-80 V กระแสไฟขาออกสูงสุดในโหมดปกติคือ 1-3 A ความต้านทาน Rd ใช้เป็นโหลดบัลลาสต์เพื่อปล่อยองค์ประกอบเพิ่มเติมเพื่อหลีกเลี่ยง ซัลเฟต
วงจรการทำงานได้รับพลังงานจากบล็อกกระแส (BPT) และบล็อกแรงดันไฟฟ้า (BPN)
บล็อก BPT (รูปที่ 6) ประกอบด้วยหม้อแปลงอิ่มตัวระดับกลาง PNT, วงจรเรียงกระแส B รวมถึงองค์ประกอบเสริม: โช้ค Dp และตัวเก็บประจุ C ที่รวมอยู่ในวงจรรักษาเสถียรภาพแรงดันเอาต์พุต
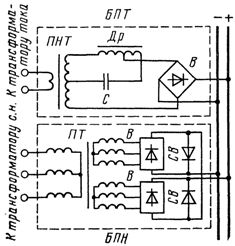
ข้าว. 6. แผนผังของแหล่งจ่ายไฟ BPT-1002 และ BPN-1002
หน่วย BPN ประกอบด้วยหม้อแปลงกลาง PT, วงจรเรียงกระแส B, วงจรเรียงกระแส SV และองค์ประกอบอื่นๆ
ข้าว. 7. ชุดจ่ายไฟ BPN-1002
หน่วย BPT ได้รับการจัดหาโดย TT และ BPN โดย VT หรือหม้อแปลง ฯลฯ หน่วย BPT และ BPN หรือหน่วย BPT และ BPN หลายหน่วยมักจะทำงานบนบัสแรงดันไฟฟ้าแบบเรียงกระแสทั่วไป ลักษณะความแตกต่างระหว่างหน่วย BPT และ BPN คือ หน่วย BPN จ่ายพลังงานให้กับวงจรการทำงานภายใต้สภาวะการทำงานปกติ เมื่อทราบว่าสถานีย่อยมีพลังงาน และหน่วย BPT ในโหมดลัดวงจร เมื่อหน่วย BPN ไม่สามารถจ่ายพลังงานให้กับ อุปกรณ์ทุติยภูมิเนื่องจากแรงดันไฟตกมากในวงจรปฐมภูมิ