Selsyns: วัตถุประสงค์ อุปกรณ์ หลักการของการกระทำ
 Selsyns เป็นเครื่องไฟฟ้ากระแสสลับชนิดพิเศษที่มีกำลังตั้งแต่ไม่กี่วัตต์ถึงหลายร้อยวัตต์ (น้อยกว่าหนึ่งกิโลวัตต์) ทำหน้าที่ selsyn เพื่อส่งมุมเชิงกลของการหมุนทางไฟฟ้าระหว่างอุปกรณ์ที่ไม่มีการเชื่อมต่อเชิงกลระหว่างกันจากระยะไกล
Selsyns เป็นเครื่องไฟฟ้ากระแสสลับชนิดพิเศษที่มีกำลังตั้งแต่ไม่กี่วัตต์ถึงหลายร้อยวัตต์ (น้อยกว่าหนึ่งกิโลวัตต์) ทำหน้าที่ selsyn เพื่อส่งมุมเชิงกลของการหมุนทางไฟฟ้าระหว่างอุปกรณ์ที่ไม่มีการเชื่อมต่อเชิงกลระหว่างกันจากระยะไกล
เซลซินแต่ละตัวมีสเตเตอร์และโรเตอร์ซึ่งเป็นที่ตั้งของขดลวดกระแสสลับ มีขดลวดที่มีขดลวดเพียงเส้นเดียวบนสเตเตอร์และขดลวดที่มีสามขดลวดบนโรเตอร์และในทางกลับกันโดยมีขดลวดสามขดลวดบนสเตเตอร์และขดลวดที่มีขดลวดหนึ่งเส้นบนโรเตอร์และสุดท้ายคือขดลวดด้วย สามขดลวดบนสเตเตอร์และขดลวดเดียวกันบนโรเตอร์
ตามวัตถุประสงค์ในแผนการควบคุมอัตโนมัติ selsyns แบ่งออกเป็น:
- เซ็นเซอร์เซลซิน,
- เซลซินรีซีฟเวอร์
- ความแตกต่าง
เพื่อทำความเข้าใจการทำงานของ selsyn ให้พิจารณารูปที่ 1, ก.
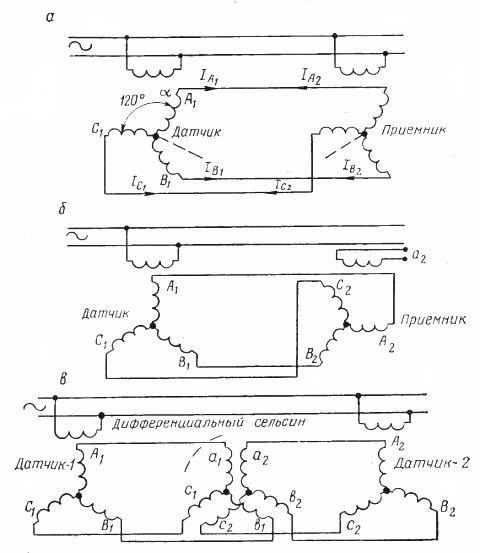
ข้าว. 1. แผนการเปิด selsin: a - ตามเซ็นเซอร์ระบบ - ตัวรับ; b - ตัวรับหม้อแปลงในโหมดหม้อแปลง ค — ดิฟเฟอเรนเชียล
เซ็นเซอร์ selsyn และตัวรับ selsyn ที่มีขดลวดสเตเตอร์แบบม้วนเดียวเชื่อมต่อกับเครือข่าย AC เดียวกันและขดลวดโรเตอร์สามขดลวดเชื่อมต่อกัน หากคุณหมุนโรเตอร์เซ็นเซอร์ไปที่มุมใดก็ได้ โรเตอร์รับจะหมุนเป็นมุมเดียวกัน หากโรเตอร์เซ็นเซอร์หมุนอย่างต่อเนื่องด้วยความเร็วสุ่ม โรเตอร์รับสัญญาณจะหมุนด้วยความเร็วเดียวกัน
การกระทำของการเชื่อมต่อ Selsin นั้นขึ้นอยู่กับหลักการของการเหนี่ยวนำแม่เหล็กไฟฟ้าซึ่งมีดังต่อไปนี้ กระแสสลับในขดลวดสเตเตอร์แบบขดลวดเดี่ยวทำให้เกิดกระแสในขดลวดโรเตอร์สามขดลวดซึ่งค่าจะขึ้นอยู่กับตำแหน่งสัมพัทธ์ของขดลวดโรเตอร์และสเตเตอร์
ถ้าโรเตอร์ของเซลซินทั้งสองมีระยะห่างเท่าๆ กันเมื่อเทียบกับสเตเตอร์ กระแสในสายเชื่อมต่อของโรเตอร์จะเท่ากันและตรงข้ามกัน ดังนั้นกระแสในขดลวดแต่ละอันจึงเป็นศูนย์ เป็นผลให้แรงบิดของเพลาของ selsyn ทั้งสองเป็นศูนย์
หากคุณหมุนโรเตอร์ของเซ็นเซอร์ selsin ด้วยตนเองหรืออย่างอื่นไปที่มุมหนึ่งสมดุลของกระแสระหว่างโรเตอร์จะถูกรบกวนและแรงบิดจะปรากฏบนเพลาของเครื่องรับ selsin เนื่องจากโรเตอร์จะหมุน ในขณะที่ความไม่สมดุลของกระแสน้ำหายไป นั่นคือ จนกว่าโรเตอร์นี้จะอยู่ในตำแหน่งเดียวกับซิงโครเซนเซอร์

ในระบบควบคุมอัตโนมัติ ตัวรับ selsyn มักจะทำงานในโหมดหม้อแปลง (รูปที่ 1, b) ในกรณีนี้โรเตอร์ของเครื่องรับจะอยู่กับที่และขดลวดสเตเตอร์จะถูกตัดการเชื่อมต่อจากเครือข่าย ในขดลวด e นี้ถูกเหนี่ยวนำ เป็นต้น v. ที่ด้านข้างของโรเตอร์ ผ่านขดลวดที่กระแสไหลเนื่องจากตำแหน่งของโรเตอร์ของเซ็นเซอร์ selsynซึ่งหมายความว่าค่าของ e เป็นต้น ด้วยขั้วต่อโรเตอร์ของเครื่องรับจะเป็นสัดส่วนกับมุมการหมุนของเซ็นเซอร์
ในตำแหน่งเริ่มต้น โรเตอร์จะถูกแทนที่ 90 °โดยสัมพันธ์กัน และในกรณีนี้ e เป็นต้น s เป็นศูนย์ เมื่อเซ็นเซอร์โรเตอร์หมุนแล้ว e จะถูกเหนี่ยวนำบนโรเตอร์ตัวรับ เป็นต้น กับ Ep สัดส่วนกับมุมของความแตกต่างของโรเตอร์
Epr = Emax x sinθ
ดิฟเฟอเรนเชียล เซลซินใช้ในกรณีที่จำเป็นต้องควบคุมความแตกต่างของมุมการหมุนของสองแกน เช่น ความแตกต่างของพวกเขา ในกรณีนี้เซ็นเซอร์ selsin สองตัวตั้งอยู่บนเพลาสองอันซึ่งความเร็วจะถูกเปรียบเทียบกัน โรเตอร์ของ selsins เหล่านี้เชื่อมต่อกันด้วยขดลวดสามขดลวดกับขดลวดสามขดลวดของสเตเตอร์และโรเตอร์ที่สาม เซลซินซึ่งเป็นดิฟเฟอเรนเชียล (รูปที่ 1 , ใน) มุมการหมุนของดิฟเฟอเรนเชียลโรเตอร์ของ selsyn เท่ากับความแตกต่างระหว่างมุมการหมุนของเซ็นเซอร์ selsyn