เฟสเมตร - วัตถุประสงค์ ประเภท อุปกรณ์ และหลักการทำงาน
 อุปกรณ์วัดทางไฟฟ้าเรียกว่าเฟสมิเตอร์ ซึ่งมีหน้าที่วัดมุมเฟสระหว่างการสั่นทางไฟฟ้า 2 ครั้งที่มีความถี่คงที่ ตัวอย่างเช่น เมื่อใช้เครื่องวัดเฟสเซอร์ คุณสามารถวัดมุมเฟสในเครือข่ายแรงดันไฟฟ้าสามเฟสได้ เฟสมิเตอร์มักใช้เพื่อกำหนดตัวประกอบกำลังไฟฟ้า โคไซน์พี ของการติดตั้งระบบไฟฟ้าใดๆ ดังนั้น เฟสมิเตอร์จึงถูกใช้อย่างแพร่หลายในการพัฒนา การว่าจ้าง และการทำงานของอุปกรณ์และเครื่องมือไฟฟ้าและอิเล็กทรอนิกส์ต่างๆ
อุปกรณ์วัดทางไฟฟ้าเรียกว่าเฟสมิเตอร์ ซึ่งมีหน้าที่วัดมุมเฟสระหว่างการสั่นทางไฟฟ้า 2 ครั้งที่มีความถี่คงที่ ตัวอย่างเช่น เมื่อใช้เครื่องวัดเฟสเซอร์ คุณสามารถวัดมุมเฟสในเครือข่ายแรงดันไฟฟ้าสามเฟสได้ เฟสมิเตอร์มักใช้เพื่อกำหนดตัวประกอบกำลังไฟฟ้า โคไซน์พี ของการติดตั้งระบบไฟฟ้าใดๆ ดังนั้น เฟสมิเตอร์จึงถูกใช้อย่างแพร่หลายในการพัฒนา การว่าจ้าง และการทำงานของอุปกรณ์และเครื่องมือไฟฟ้าและอิเล็กทรอนิกส์ต่างๆ
เมื่อเชื่อมต่อเฟสเซอร์เข้ากับวงจรที่วัดได้ อุปกรณ์จะเชื่อมต่อกับวงจรแรงดันและวงจรการวัดกระแส สำหรับเครือข่ายแหล่งจ่ายไฟสามเฟส เฟสเซอร์เชื่อมต่อด้วยแรงดันไฟฟ้าเป็นสามเฟส และกระแสไปยังขดลวดทุติยภูมิของหม้อแปลงกระแสก็อยู่ในสามเฟสเช่นกัน
ขึ้นอยู่กับอุปกรณ์ของเครื่องวัดเฟส รูปแบบการเชื่อมต่อแบบง่ายยังเป็นไปได้เมื่อเชื่อมต่อกับสามเฟสด้วยแรงดันและด้วยกระแส - เพียงสองเฟสเท่านั้นจากนั้นเฟสที่สามจะคำนวณโดยการเพิ่มเวกเตอร์ของกระแสเพียงสองกระแส (สองเฟสที่วัดได้) วัตถุประสงค์ของเฟสมิเตอร์ — การวัดค่าโคไซน์พี (ตัวประกอบกำลัง) ดังนั้นในภาษาธรรมดาจึงเรียกอีกอย่างว่า «โคไซน์เมตร»
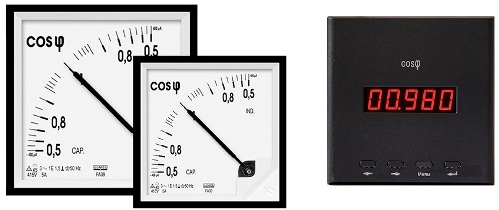
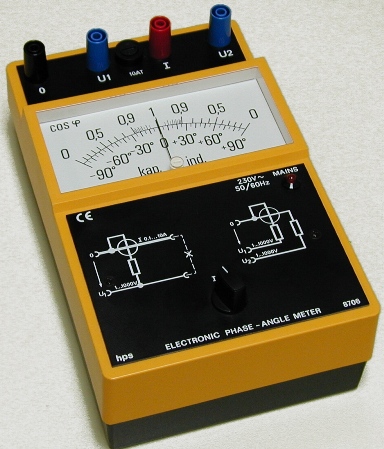
วันนี้คุณสามารถหาเฟสมิเตอร์ได้สองประเภท: อิเล็กโทรไดนามิกและดิจิตอล เครื่องวัดเฟสแบบอิเล็กโทรไดนามิกหรือแม่เหล็กไฟฟ้านั้นใช้รูปแบบที่เรียบง่ายพร้อมกลไกตามสัดส่วนสำหรับการวัดการเปลี่ยนเฟส เฟรมสองเฟรมยึดติดกันอย่างเหนียวแน่น โดยมีมุมระหว่าง 60 องศา ยึดไว้กับแกนในส่วนรองรับ และไม่มีโมเมนต์เชิงกลตรงข้ามกัน
ภายใต้เงื่อนไขบางประการซึ่งกำหนดโดยการเปลี่ยนเฟสของกระแสในวงจรของสองเฟรมนี้ เช่นเดียวกับมุมของการแนบของเฟรมเหล่านี้ซึ่งกันและกัน ส่วนที่เคลื่อนที่ได้ของอุปกรณ์วัดจะหมุนด้วยมุมที่เท่ากัน ถึงมุมเฟส มาตราส่วนเชิงเส้นของอุปกรณ์ช่วยให้คุณบันทึกผลการวัดได้
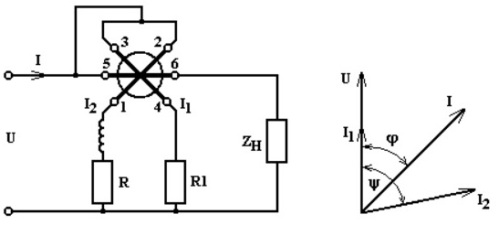
มาดูหลักการทำงานของเครื่องวัดเฟสอิเล็กโทรไดนามิก มีขดลวดกระแส I คงที่และขดลวดเคลื่อนที่สองขด กระแส I1 และ I2 ไหลผ่านขดลวดเคลื่อนที่แต่ละอัน กระแสที่ไหลสร้างฟลักซ์แม่เหล็กทั้งในขดลวดที่อยู่นิ่งและขดลวดเคลื่อนที่ ดังนั้น ฟลักซ์แม่เหล็กที่มีปฏิสัมพันธ์ของขดลวดจึงสร้างแรงบิด M1 และ M2 สองตัว
ค่าของช่วงเวลาเหล่านี้ขึ้นอยู่กับตำแหน่งสัมพัทธ์ของขดลวดทั้งสอง ในมุมของการหมุนของส่วนที่เคลื่อนที่ของอุปกรณ์วัด และช่วงเวลาเหล่านี้จะถูกส่งไปในทิศทางตรงกันข้ามค่าเฉลี่ยของช่วงเวลาขึ้นอยู่กับกระแสที่ไหลในขดลวดเคลื่อนที่ (I1 และ I2) ของกระแสที่ไหลในขดลวดนิ่ง (I) ในมุมเปลี่ยนเฟสของกระแสของขดลวดเคลื่อนที่ที่สัมพันธ์กับ กระแสในขดลวดนิ่ง (ψ1 และ ψ2 ) และบนขดลวดของพารามิเตอร์การออกแบบ
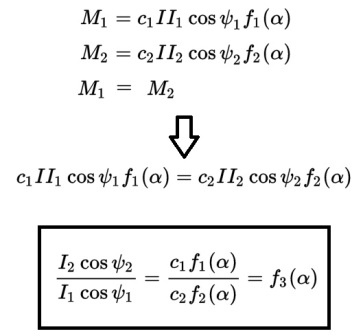
เป็นผลให้ส่วนที่เคลื่อนที่ได้ของอุปกรณ์หมุนภายใต้การกระทำของช่วงเวลาเหล่านี้จนเกิดความสมดุล ซึ่งเกิดจากความเท่าเทียมกันของช่วงเวลาที่เป็นผลมาจากการหมุน สเกลวัดเฟสสามารถสอบเทียบในแง่ของตัวประกอบกำลัง
ข้อเสียของเครื่องวัดเฟสไฟฟ้าพลศาสตร์คือการพึ่งพาการอ่านความถี่และการใช้พลังงานที่สำคัญจากแหล่งที่ศึกษา
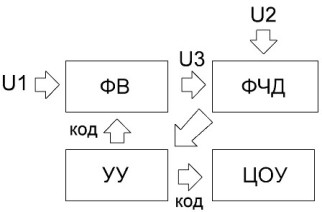
เครื่องวัดเฟสดิจิตอลสามารถนำไปใช้ได้หลายวิธี ตัวอย่างเช่น เฟสมิเตอร์ชดเชยมีความแม่นยำสูงแม้ว่าจะทำงานในโหมดแมนนวล อย่างไรก็ตาม ลองพิจารณาวิธีการทำงาน มีแรงดันไฟฟ้าไซน์สองตัว U1 และ U2 ซึ่งเป็นการเปลี่ยนเฟสที่คุณต้องรู้
แรงดันไฟฟ้า U2 จ่ายให้กับตัวเปลี่ยนเฟส (PV) ซึ่งควบคุมโดยรหัสจากชุดควบคุม (UU) การเปลี่ยนเฟสระหว่าง U3 และ U2 จะค่อยๆ เปลี่ยนไปจนกว่าจะถึงเงื่อนไขที่ U1 และ U3 อยู่ในเฟส โดยการปรับเครื่องหมายของการเปลี่ยนเฟสระหว่าง U1 และ U3 จะกำหนดตัวตรวจจับที่ไวต่อเฟส (PSD)
สัญญาณเอาต์พุตของตัวตรวจจับที่ไวต่อเฟสจะถูกส่งไปยังชุดควบคุม (CU) อัลกอริธึมการปรับสมดุลถูกนำมาใช้โดยใช้วิธีรหัสพัลส์ หลังจากกระบวนการปรับสมดุลเสร็จสิ้น รหัส Phase Shift Factor (PV) จะแสดงการเลื่อนเฟสระหว่าง U1 และ U2
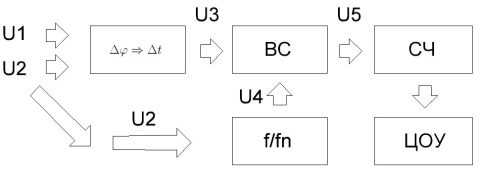
เครื่องวัดเฟสดิจิตอลสมัยใหม่ส่วนใหญ่ใช้หลักการนับแบบไม่ต่อเนื่องวิธีนี้ทำงานในสองขั้นตอน: แปลงการเปลี่ยนเฟสเป็นสัญญาณของระยะเวลาหนึ่ง จากนั้นวัดระยะเวลาของพัลส์นี้โดยใช้ตัวเลขที่ไม่ต่อเนื่อง อุปกรณ์ประกอบด้วยตัวแปลงเฟสเป็นพัลส์ ตัวเลือกเวลา (VS) พัลส์การปรับรูปร่างแบบแยก (f / fn) ตัวนับ (MF) และ DSP
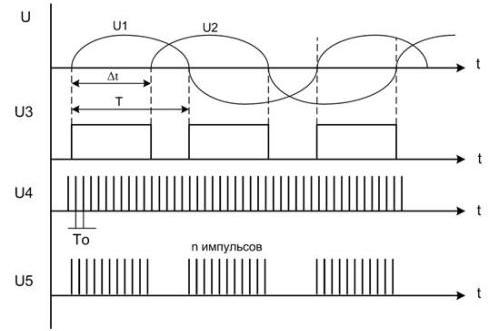
ตัวแปลงเฟสเป็นพัลส์เกิดจาก U1 และ U2 โดยมีการเลื่อนเฟสΔφ พัลส์สี่เหลี่ยม U3 เป็นลำดับ พัลส์ U3 เหล่านี้มีอัตราการทำซ้ำและรอบการทำงานที่สอดคล้องกับความถี่และเวลาชดเชยของสัญญาณอินพุต U1 และ U2 พัลส์ U4 และ U3 สร้างพัลส์สัมผัสแบบไม่ต่อเนื่องของช่วงเวลา T0 ซึ่งจะใช้กับตัวเลือกเวลา ตัวเลือกเวลาจะเปิดขึ้นตามระยะเวลาของพัลส์ U3 และหมุนเวียนผ่านพัลส์ U4 อันเป็นผลมาจากเอาต์พุตของตัวเลือกเวลาทำให้ได้การระเบิดของพัลส์ U5 ระยะเวลาการทำซ้ำคือ T
ตัวนับ (MF) นับจำนวนพัลส์ในแพ็กเก็ตอนุกรม U5 โดยที่จำนวนพัลส์ที่ได้รับที่ตัวนับ (MF) เป็นสัดส่วนกับการเปลี่ยนเฟสระหว่าง U1 และ U2 รหัสจากตัวนับจะถูกส่งไปยังศูนย์ควบคุมส่วนกลางและการอ่านค่าของอุปกรณ์จะแสดงเป็นองศาด้วยความแม่นยำหนึ่งในสิบซึ่งทำได้โดยระดับดุลยพินิจของอุปกรณ์ ข้อผิดพลาดความไม่ต่อเนื่องเกี่ยวข้องกับความสามารถในการวัด Δt ด้วยความแม่นยำของช่วงการนับชีพจรหนึ่งช่วง
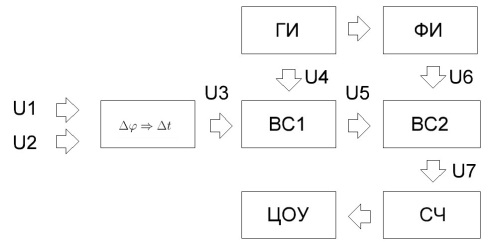
เครื่องวัดเฟสอิเล็กทรอนิกส์แบบเฉลี่ย cosine phi ดิจิตอลสามารถลดข้อผิดพลาดได้โดยการหาค่าเฉลี่ยในช่วง T ของสัญญาณทดสอบหลายช่วงโครงสร้างของเครื่องวัดเฟสเฉลี่ยแบบดิจิทัลแตกต่างจากการนับวงจรแบบไม่ต่อเนื่องโดยมีตัวเลือกเวลา (BC2) อีก 1 ตัว เช่นเดียวกับเครื่องกำเนิดพัลส์ (GP) และเครื่องกำเนิดพัลส์แบบแยก (PI)
ที่นี่ ตัวแปลงเฟส-ชิฟต์ U5 มีตัวสร้างพัลส์ (PI) และตัวเลือกเวลา (BC1) สำหรับช่วงเวลาที่สอบเทียบ Tk ซึ่งมีขนาดใหญ่กว่า T มาก จะมีการป้อนแพ็กเก็ตหลายแพ็กเก็ตไปยังอุปกรณ์ที่เอาต์พุตซึ่งมีแพ็กเก็ตหลายแพ็กเก็ต ซึ่งจำเป็นสำหรับการหาค่าเฉลี่ยของผลลัพธ์
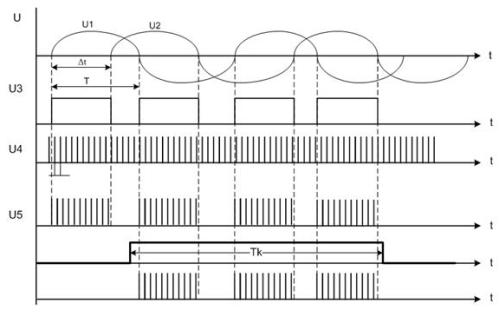
พัลส์ U6 มีระยะเวลาหลายเท่าของ T0 เนื่องจากพัลส์เชปเปอร์ (PI) ทำงานบนหลักการหารความถี่ด้วยปัจจัยที่กำหนด สัญญาณ U6 เป็นพัลส์เปิดตัวเลือกเวลา (BC2) เป็นผลให้หลายแพ็กเก็ตมาถึงอินพุต สัญญาณ U7 ถูกส่งไปยังเคาน์เตอร์ (MF) ซึ่งเชื่อมต่อกับศูนย์ควบคุมกลาง ความละเอียดของอุปกรณ์ถูกกำหนดโดยชุดของ U6
ข้อผิดพลาดของเฟสมิเตอร์ยังได้รับผลกระทบจากความแม่นยำที่ไม่ดีในการแก้ไขการเปลี่ยนเฟสโดยตัวแปลงในช่วงเวลาของการเปลี่ยนสัญญาณ U2 และ U1 ถึงศูนย์ แต่ความไม่ถูกต้องเหล่านี้จะลดลงเมื่อเฉลี่ยผลการคำนวณสำหรับระยะเวลา Tk ซึ่งมากกว่าระยะเวลาของสัญญาณอินพุตที่ศึกษามาก
เราหวังว่าบทความนี้จะช่วยให้คุณมีความเข้าใจโดยทั่วไปว่าเฟสมิเตอร์ทำงานอย่างไร คุณสามารถค้นหาข้อมูลโดยละเอียดเพิ่มเติมได้ในเอกสารพิเศษซึ่งโชคดีที่มีอินเทอร์เน็ตมากมายในปัจจุบัน