ตัวเข้ารหัส — เซ็นเซอร์มุมหมุน
 การจัดตำแหน่งในอุปกรณ์อุตสาหกรรมประเภทต่างๆ มีให้โดยใช้อุปกรณ์ที่ดูเรียบง่าย — เอ็นโค้ดเดอร์ (หรืออีกนัยหนึ่งคือเซ็นเซอร์วัดมุม)
การจัดตำแหน่งในอุปกรณ์อุตสาหกรรมประเภทต่างๆ มีให้โดยใช้อุปกรณ์ที่ดูเรียบง่าย — เอ็นโค้ดเดอร์ (หรืออีกนัยหนึ่งคือเซ็นเซอร์วัดมุม)
ตัวเข้ารหัสใช้เพื่อแปลงการเคลื่อนที่เชิงเส้นหรือแบบหมุนเป็นสัญญาณดิจิทัลแบบไบนารี ตัวเข้ารหัสเป็นอุปกรณ์ที่เพลาเชื่อมต่อกับเพลาหมุนของวัตถุภายใต้การศึกษาและให้การควบคุมแบบอิเล็กทรอนิกส์ของมุมการหมุนของหลัง ตามหลักการทำงาน ตัวเข้ารหัสจะแบ่งออกเป็นออปติคัลและแม่เหล็ก
บนเพลาของตัวเข้ารหัสออปติคัลมีแผ่นดิสก์ที่มีหน้าต่างเป็นระยะ ๆ รอบ ๆ ขอบซึ่งมี LED และโฟโตทรานซิสเตอร์ซึ่งสร้างสัญญาณเอาต์พุตในรูปแบบ รถไฟชีพจรรูปสี่เหลี่ยมผืนผ้า ด้วยความถี่ที่เป็นสัดส่วนกับจำนวนหน้าต่างและความเร็วในการหมุนของดิสก์ / เพลา จำนวนพัลส์ระบุมุมของการหมุน
ตัวเข้ารหัสแบบออปติคอลมีทั้งแบบเพิ่มและเข้ารหัสแบบสัมบูรณ์
ตัวเข้ารหัสส่วนเพิ่มมีดิสก์ที่ไม่ต่อเนื่องซึ่งมีหน้าต่างจำนวนมากที่มีขนาดเท่ากับรัศมีฐานและค่าที่อ่านได้สองครั้ง ออปโตคัปเปลอร์ซึ่งช่วยให้คุณแก้ไขทั้งมุมการหมุนและทิศทางการหมุนของเพลาในรัศมีพิเศษของแผ่นดิสก์มีหน้าต่างแบ่งเดียวและออปโตคัปเปลอร์ที่สอดคล้องกันซึ่งกำหนดตำแหน่งเริ่มต้น (บ้าน)
แรงบิดเชิงลบ - ตัวเข้ารหัสที่เพิ่มขึ้นให้การอ่านค่าสัมพัทธ์ของมุมการหมุน ข้อมูลที่ไม่ได้รับการบันทึกไว้เมื่อหยุดการหมุน ข้อได้เปรียบของพวกเขารวมถึงความเรียบง่ายของการออกแบบ (และด้วยเหตุนี้ ต้นทุนต่ำ) ที่ความละเอียดสูงและความถี่ในการทำงานสูง
ตัวเข้ารหัสส่วนเพิ่มพร้อมความทนทานที่เพิ่มขึ้นนั้นมุ่งเน้นไปที่การใช้งานทางอุตสาหกรรม - ในวิศวกรรมเครื่องกล, โรงรีด, การต่อเรือ, สิ่งทอ, รองเท้า, งานไม้ สำหรับตัวเข้ารหัสดังกล่าว พารามิเตอร์ชี้ขาดคือความละเอียดในมุมของการหมุน ความสามารถในการทำงานที่ความถี่สูง การป้องกันในระดับสูงเพื่อให้ทนต่อสภาวะแวดล้อมที่รุนแรง
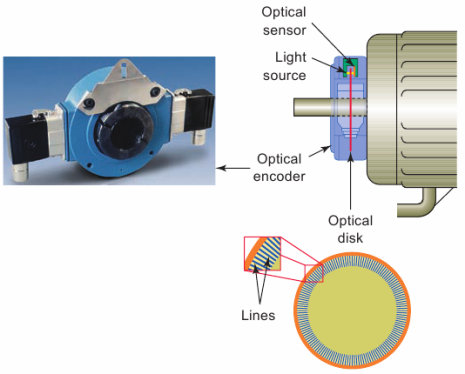
แผ่นดิสก์ที่มีเส้นหรือรอยบากขวางลำแสงไปยังเซ็นเซอร์ออปติคอล วงจรอิเล็กทรอนิกส์ตรวจจับการแตกของลำแสงและสร้างพัลส์เอาต์พุตดิจิตอลจากตัวเข้ารหัส
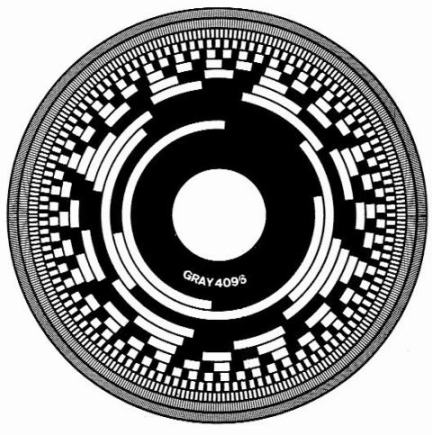
ดิสก์เข้ารหัส — อุปกรณ์สำหรับแปลงการเคลื่อนที่เชิงมุมของเพลาเป็นรูปแบบดิจิทัล ภาพเรขาคณิตของรหัสดิจิทัลถูกนำไปใช้กับดิสก์เข้ารหัส สัญลักษณ์บิตรหัสจะใช้บนแทร็กศูนย์กลาง และบิตที่มีนัยสำคัญน้อยที่สุด (มีนัยสำคัญน้อยกว่า) จะอยู่ใกล้กับขอบรอบนอกมากขึ้น
ขึ้นอยู่กับวิธีการอ่านรหัส (หน้าสัมผัส, ตาแมว, แม่เหล็กไฟฟ้า, การเหนี่ยวนำ, ไฟฟ้าสถิต ฯลฯ ) ภาพเรขาคณิตของรหัสประกอบด้วยการนำไฟฟ้าและฉนวนไฟฟ้า, โปร่งใสและทึบแสง, แม่เหล็กและไม่เป็นแม่เหล็ก ฯลฯ
ที่แพร่หลายที่สุดคือการเข้ารหัสดิสก์ด้วยรหัสไบนารีที่หลากหลายซึ่งไม่รวมการเกิดข้อผิดพลาดเมื่อข้ามขอบเขตของส่วนที่แยกจากกันเมื่อบางบิตสามารถอ่านได้ที่ด้านหนึ่งของขอบเขตและบางส่วนในอีกด้านหนึ่ง (เนื่องจากการติดตั้งที่ไม่ถูกต้อง ของอุปกรณ์แบบถอดได้ หรือเนื่องจากรหัสอ่านไม่พร้อมกันในขณะที่ดิสก์กำลังหมุน รหัสเหล่านี้รวมถึงรหัส Fau (รหัสบาร์เกอร์) และรหัสสะท้อน (รหัสสีเทา)
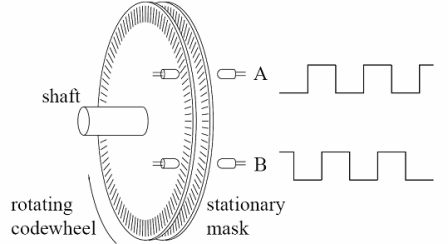
เครื่องเข้ารหัสแบบหมุนออปติคัลบางตัวใช้ดิสก์เครื่องเข้ารหัสแบบสะท้อนแสง ดิสก์นี้มีส่วนสลับที่ดูดซับหรือสะท้อนแสง และแหล่งกำเนิดแสงพร้อมกับตัวรับจะอยู่ที่ด้านหนึ่งของดิสก์ หากมีแหล่งกำเนิดแสงและตัวรับสัญญาณเพียงตัวเดียว ลำดับของพัลส์จากเซ็นเซอร์จะช่วยให้คุณทราบว่าดิสก์หมุนไปกี่ก้าวเมื่อเทียบกับตำแหน่งก่อนหน้า
เซ็นเซอร์ไม่สามารถบอกทิศทางการหมุนได้ แต่ถ้าคุณเพิ่มคู่ตัวรับจากแหล่งที่สอง 90 ออกจากเฟสจากตัวแรก ไมโครคอนโทรลเลอร์จะสามารถกำหนดทิศทางการหมุนของดิสก์ตามความแตกต่างของเฟสระหว่าง ชีพจรรถไฟ
ควรจำไว้ว่าระบบใด ๆ ที่ตรวจจับการหมุนสัมพัทธ์ของดิสก์ แต่ไม่สามารถวัดตำแหน่งเชิงมุมสัมบูรณ์ได้คือตัวเข้ารหัสส่วนเพิ่ม
ตัวเข้ารหัสแบบสัมบูรณ์มีดิสก์ที่ไม่ต่อเนื่องซึ่งมีหน้าต่างศูนย์กลางที่มีรัศมีต่างกัน ซึ่งขนาดสัมพัทธ์ถูกกำหนดโดยรหัสไบนารีและอ่านพร้อมกัน โดยให้สัญญาณเอาต์พุตที่เป็นรหัสสำหรับตำแหน่งเชิงมุมแต่ละตำแหน่ง (รหัสสีเทา รหัสฐานสอง...)
ในกรณีนี้ เป็นไปได้ที่จะได้รับข้อมูลเกี่ยวกับตำแหน่งทันทีของเพลาโดยไม่ต้องใช้ตัวนับดิจิตอลหรือกลับสู่ตำแหน่งเริ่มต้น เนื่องจากเอาต์พุตมีรหัสคำ — «n บิต» ซึ่งป้องกันสัญญาณรบกวนทางไฟฟ้า
ตัวเข้ารหัสสัมบูรณ์ใช้ในแอปพลิเคชันที่ต้องการการจัดเก็บข้อมูลอินพุตเป็นเวลานาน แต่มีความซับซ้อนในการออกแบบและมีราคาแพงกว่า
ตัวเข้ารหัสสัมบูรณ์ที่มีอินเทอร์เฟซ fieldbus มีอินเทอร์เฟซเอาต์พุตสำหรับการสื่อสาร fieldbus ตามมาตรฐาน CANopen, ProfiBus, DeviceNet, Ethernet, InterBus และใช้รหัสไบนารีเพื่อกำหนดมุมของการหมุน อินเทอร์เฟซการสื่อสารข้างต้นสามารถตั้งโปรแกรมได้ตามพารามิเตอร์จำนวนหนึ่ง: เช่น ทิศทางการหมุน ความละเอียดของพัลส์ต่อรอบ อัตราบอด

ตัวเข้ารหัสที่ติดตั้งบนเพลามอเตอร์ให้การควบคุมตำแหน่งที่แม่นยำได้อย่างมีประสิทธิภาพ ตัวเข้ารหัสดังกล่าวมักจะผลิตในรุ่น «รู» และข้อต่อพิเศษเป็นองค์ประกอบสำคัญของการออกแบบ ซึ่งช่วยชดเชยฟันเฟืองของเพลามอเตอร์
การวางตำแหน่งภายใต้เงื่อนไขข้างต้นมีประสิทธิภาพมากที่สุดให้ตัวเข้ารหัสแม่เหล็ก ซึ่งการแปลงการเคลื่อนที่เชิงมุมของเพลาเป็นสัญญาณอิเล็กทรอนิกส์นั้นดำเนินการแบบไม่สัมผัสตามเอฟเฟกต์ Hall ซึ่งไม่เกี่ยวข้องกับการหมุนของตัวตัดแสงภายใน เซ็นเซอร์และช่วยให้การประมวลผลสัญญาณด้วยความเร็วสูงถึง 60,000 รอบต่อนาที
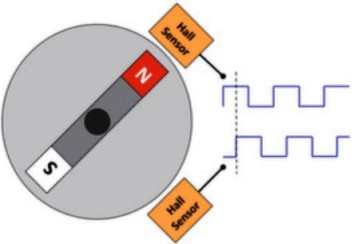
ในเอ็นโค้ดเดอร์แม่เหล็ก การหมุนด้วยความเร็วสูงของเพลาภายนอกซึ่งแม่เหล็กทรงกระบอกถาวรถูกยึดไว้ จะถูกรับรู้โดยเซ็นเซอร์ Hall ที่รวมกันบนคริสตัลเซมิคอนดักเตอร์เดี่ยวที่มีตัวควบคุมการประมวลผลสัญญาณ
เมื่อขั้วของแม่เหล็กถาวรหมุนเหนือไมโครเซอร์กิตด้วย เซ็นเซอร์ฮอลล์ เวกเตอร์การเหนี่ยวนำแม่เหล็กแบบแปรผันทำให้เกิดแรงดัน Hall ซึ่งมีข้อมูลเกี่ยวกับค่าทันทีของมุมการหมุนของเพลา ไมโครคอนโทรลเลอร์ให้การแปลงแรงดัน Hall เป็นพารามิเตอร์มุมตำแหน่งอย่างรวดเร็ว

ความเป็นไปได้ของการแปลงดังกล่าวโดยไม่ต้องเชื่อมต่อเชิงกลโดยตรงของแม่เหล็กและองค์ประกอบเซ็นเซอร์ Hall เป็นข้อได้เปรียบหลักของตัวเข้ารหัสแม่เหล็ก ทำให้มีความน่าเชื่อถือและความทนทานสูง และช่วยให้ทำงานได้อย่างมีประสิทธิภาพในการใช้งานความเร็วสูงที่เกี่ยวข้องกับระบบอัตโนมัติทางอุตสาหกรรม การพิมพ์ งานโลหะ , เครื่องมือวัดและเครื่องมือวัด