ลักษณะทางกลของมอเตอร์เหนี่ยวนำ
 ลักษณะทางกลของมอเตอร์เรียกว่าการพึ่งพาความเร็วของโรเตอร์ในช่วงเวลาของเพลา n = f (M2)... เนื่องจากภายใต้ภาระ ช่วงเวลาเดินเบามีขนาดเล็ก ดังนั้น M2 ≈ M และลักษณะทางกลจะแสดงโดยการพึ่งพา n = f (M)... เมื่อพิจารณาความสัมพันธ์ s = (n1 — n) / n1 แล้ว คุณลักษณะเชิงกลสามารถรับได้โดยการแสดงการพึ่งพาแบบกราฟิกในพิกัด n และ M (รูปที่ 1)
ลักษณะทางกลของมอเตอร์เรียกว่าการพึ่งพาความเร็วของโรเตอร์ในช่วงเวลาของเพลา n = f (M2)... เนื่องจากภายใต้ภาระ ช่วงเวลาเดินเบามีขนาดเล็ก ดังนั้น M2 ≈ M และลักษณะทางกลจะแสดงโดยการพึ่งพา n = f (M)... เมื่อพิจารณาความสัมพันธ์ s = (n1 — n) / n1 แล้ว คุณลักษณะเชิงกลสามารถรับได้โดยการแสดงการพึ่งพาแบบกราฟิกในพิกัด n และ M (รูปที่ 1)
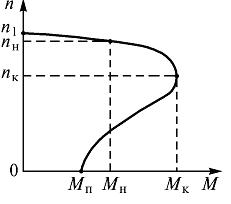
ข้าว. 1. ลักษณะทางกลของมอเตอร์เหนี่ยวนำ
 ลักษณะทางกลตามธรรมชาติของมอเตอร์แบบอะซิงโครนัสสอดคล้องกับรูปแบบพื้นฐาน (หนังสือเดินทาง) ของการรวมและพารามิเตอร์เล็กน้อยของแรงดันไฟฟ้า ได้รับลักษณะประดิษฐ์หากรวมองค์ประกอบเพิ่มเติม: ตัวต้านทาน, เครื่องปฏิกรณ์, ตัวเก็บประจุ เมื่อมอเตอร์ได้รับแรงดันไฟฟ้าเล็กน้อย ลักษณะเฉพาะจะแตกต่างจากลักษณะทางกลตามธรรมชาติด้วย
ลักษณะทางกลตามธรรมชาติของมอเตอร์แบบอะซิงโครนัสสอดคล้องกับรูปแบบพื้นฐาน (หนังสือเดินทาง) ของการรวมและพารามิเตอร์เล็กน้อยของแรงดันไฟฟ้า ได้รับลักษณะประดิษฐ์หากรวมองค์ประกอบเพิ่มเติม: ตัวต้านทาน, เครื่องปฏิกรณ์, ตัวเก็บประจุ เมื่อมอเตอร์ได้รับแรงดันไฟฟ้าเล็กน้อย ลักษณะเฉพาะจะแตกต่างจากลักษณะทางกลตามธรรมชาติด้วย
คุณลักษณะทางกลเป็นเครื่องมือที่สะดวกและมีประโยชน์มากสำหรับการวิเคราะห์โหมดสแตติกและไดนามิกของไดรฟ์ไฟฟ้า
ตัวอย่างการคำนวณลักษณะทางกลของมอเตอร์เหนี่ยวนำ
มอเตอร์เหนี่ยวนำกรงกระรอกสามเฟสถูกป้อนจากเครือข่ายที่มีแรงดันไฟฟ้า = 380 V ที่ = 50 Hz พารามิเตอร์เครื่องยนต์: Pn = 14 kW, нn = 960 rpm, cosφн= 0.85, ηн= 0.88, ทวีคูณของแรงบิดสูงสุด km = 1.8
กำหนด: กระแสเฟสขดลวดสเตเตอร์ที่กำหนด, จำนวนคู่ขั้ว, สลิปพิกัด, แรงบิดเพลาพิกัด, แรงบิดวิกฤต, สลิปวิกฤต และสร้างลักษณะทางกลของมอเตอร์
คำตอบ. พลังงานที่กำหนดที่ใช้จากเครือข่าย
P1n =Pn / ηn = 14 / 0.88 = 16 กิโลวัตต์
กระแสไฟฟ้าที่กำหนดโดยเครือข่าย

จำนวนคู่เสา
p = 60 f / n1 = 60 x 50/1000 = 3,
โดยที่ n1 = 1,000 — ความเร็วซิงโครนัสที่ใกล้เคียงที่สุดกับความถี่ที่ระบุ нn = 960 รอบต่อนาที
สลิปที่กำหนด
сн = (n1 — нн) / n1 = (1,000 — 960 ) / 1,000 = 0.04
พิกัดแรงบิดของเพลามอเตอร์
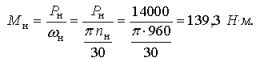
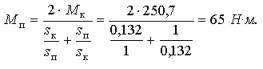
ช่วงเวลาที่สำคัญ
Mk = km x Mn = 1.8 x 139.3 = 250.7 N • m.
เราหาสลิปวิกฤตโดยการแทนที่ M = Mn, s = sn และ Mk / Mn = km

ในการวาดลักษณะทางกลของเครื่องยนต์โดยใช้ n = (n1 — s) กำหนดจุดลักษณะ: จุดเดินเบา s = 0, n = 1,000 รอบต่อนาที, M = 0, จุดโหมดที่กำหนด сn = 0.04, нn = 960 รอบต่อนาที, Mn = 139.3 N • m และจุดโหมดวิกฤติ сk = 0.132, нk = 868 rpm, Mk = 250.7 N • m.
สำหรับจุดสั่งงานที่มี n = 1 เราพบ n = 0
บนพื้นฐานของข้อมูลที่ได้รับจะมีการสร้างเครื่องยนต์ลักษณะทางกล สำหรับการสร้างลักษณะทางกลที่แม่นยำยิ่งขึ้นจำเป็นต้องเพิ่มจำนวนจุดออกแบบและกำหนดช่วงเวลาและความถี่ของการหมุนสำหรับสไลด์ที่กำหนด
