ไดรฟ์ไฟฟ้าแบบแปรผันเป็นวิธีการประหยัดพลังงาน
 การเปลี่ยนจากไดรฟ์ไฟฟ้าที่ไม่มีการควบคุมเป็นไดรฟ์ที่มีการควบคุมเป็นหนึ่งในวิธีหลักในการประหยัดพลังงานในไดรฟ์ไฟฟ้าและในด้านเทคโนโลยีด้วยไดรฟ์ไฟฟ้า
การเปลี่ยนจากไดรฟ์ไฟฟ้าที่ไม่มีการควบคุมเป็นไดรฟ์ที่มีการควบคุมเป็นหนึ่งในวิธีหลักในการประหยัดพลังงานในไดรฟ์ไฟฟ้าและในด้านเทคโนโลยีด้วยไดรฟ์ไฟฟ้า
ตามกฎแล้ว ความจำเป็นในการควบคุมความเร็วหรือแรงบิดของไดรฟ์ไฟฟ้าของกลไกการผลิตนั้นถูกกำหนดโดยข้อกำหนดของกระบวนการทางเทคโนโลยี ตัวอย่างเช่น อัตราการป้อนของเครื่องตัดกำหนดความสะอาดของการประมวลผลชิ้นงานบนเครื่องกลึง การลดความเร็วลิฟต์เป็นสิ่งจำเป็นสำหรับการวางตำแหน่งรถอย่างแม่นยำก่อนที่จะหยุด ความจำเป็นในการปรับแรงบิดของเพลาที่คดเคี้ยวถูกกำหนดโดย เงื่อนไขสำหรับการรักษาแรงดึงคงที่ของวัสดุที่ได้รับบาดเจ็บ ฯลฯ
อย่างไรก็ตาม มีกลไกหลายอย่างที่ไม่ต้องการการเปลี่ยนแปลงความเร็วตามเงื่อนไขทางเทคโนโลยี หรือวิธีการอื่น (ไม่ใช้ไฟฟ้า) ที่มีอิทธิพลต่อพารามิเตอร์ของกระบวนการทางเทคโนโลยีนั้นใช้สำหรับการควบคุม
ประการแรก สิ่งเหล่านี้รวมถึงกลไกการขนส่งอย่างต่อเนื่องสำหรับการเคลื่อนย้ายผลิตภัณฑ์ที่เป็นของแข็ง ของเหลว และก๊าซ: สายพานลำเลียง พัดลม พัดลม หน่วยปั๊ม สำหรับกลไกเหล่านี้ ตามกฎแล้วในปัจจุบันมีการใช้ไดรฟ์ไฟฟ้าแบบอะซิงโครนัสที่ไม่ได้ควบคุมซึ่งกำหนดให้หน่วยงานเคลื่อนที่ด้วยความเร็วคงที่โดยไม่คำนึงถึงภาระของกลไก ภายใต้โหลดบางส่วนโหมดการทำงานที่ความเร็วคงที่จะเพิ่มขึ้น การใช้พลังงานเฉพาะ เมื่อเทียบกับโหมดปกติ
ประสิทธิภาพ NSC ลดลง ประสิทธิภาพของสายพานลำเลียงลดลง เนื่องจากส่วนแบ่งสัมพัทธ์ของพลังงานที่ใช้ไปจะเอาชนะช่วงเวลาที่ไม่ได้ใช้งาน ประหยัดกว่าคือโหมดปรับความเร็วได้ ซึ่งให้ประสิทธิภาพเท่ากัน แต่มีส่วนประกอบของแรงดึงคงที่
ในรูป 1 แสดงการพึ่งพากำลังของเพลามอเตอร์สำหรับสายพานลำเลียงที่มีโมเมนต์ว่าง Mx = 0, ЗМв สำหรับค่าคงที่ (v — const) และความเร็วที่ปรับได้ (Fg = const) ของการเคลื่อนที่ของโหลด พื้นที่แรเงาในรูปแสดงถึงการประหยัดพลังงานที่ได้รับจากการควบคุมความเร็ว
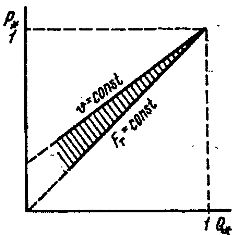
ข้าว. 1. การพึ่งพากำลังของเพลามอเตอร์ไฟฟ้ากับประสิทธิภาพของสายพานลำเลียง
ดังนั้น หากความเร็วของสายพานลดลงเหลือ 60% ของค่าเล็กน้อย กำลังของเพลาของมอเตอร์จะลดลง 10% เมื่อเทียบกับค่าที่กำหนด ผลของการควบคุมความเร็วจะสูงขึ้น แรงบิดรอบเดินเบาก็จะยิ่งมากขึ้น และลดประสิทธิภาพของสายพานลำเลียงลงอย่างมาก
การลดความเร็วของกลไกการขนส่งอย่างต่อเนื่องด้วยการบรรทุกน้อยเกินไปช่วยให้คุณทำงานตามปริมาณที่ต้องการโดยใช้พลังงานเฉพาะที่ลดลง เช่น เพื่อแก้ปัญหาทางเศรษฐกิจอย่างหมดจดในการลดการใช้พลังงานในกระบวนการทางเทคโนโลยีของการเคลื่อนย้ายผลิตภัณฑ์
โดยปกติแล้วเมื่อความเร็วของกลไกดังกล่าวลดลง ผลกระทบทางเศรษฐกิจก็ปรากฏขึ้นเนื่องจากการปรับปรุงลักษณะการทำงานของอุปกรณ์เทคโนโลยี ดังนั้นเมื่อความเร็วลดลง การสึกหรอของตัวสายพานลำเลียงจะลดลง อายุการใช้งานของท่อและอุปกรณ์เพิ่มขึ้นเนื่องจากการลดลงของแรงดันที่พัฒนาโดยเครื่องจักรสำหรับการจ่ายของเหลวและก๊าซ และการบริโภคส่วนเกินของผลิตภัณฑ์เหล่านี้ก็จะถูกกำจัดไปด้วย
ผลกระทบในด้านเทคโนโลยีมักจะสูงกว่าการประหยัดพลังงานอย่างเห็นได้ชัด ซึ่งเป็นเหตุผลว่าทำไมการตัดสินใจเลือกความเหมาะสมของการใช้ไดรฟ์ไฟฟ้าแบบควบคุมสำหรับกลไกดังกล่าวโดยการประเมินเฉพาะด้านพลังงานจึงเป็นเรื่องที่ผิดโดยพื้นฐาน
การควบคุมความเร็วของเครื่องพรวนดิน
กลไกแบบแรงเหวี่ยงสำหรับการจ่ายของเหลวและก๊าซ (พัดลม ปั๊ม พัดลม คอมเพรสเซอร์) เป็นกลไกทางอุตสาหกรรมหลักทั่วไปที่มีศักยภาพสูงสุดทั่วประเทศเพื่อลดการใช้พลังงานเฉพาะอย่างลงอย่างมาก ตำแหน่งพิเศษของกลไกแรงเหวี่ยงนั้นอธิบายได้จากมวลพลังงานสูงตามกฎด้วยโหมดการทำงานที่ยาวนาน
สถานการณ์เหล่านี้กำหนดส่วนแบ่งที่สำคัญของกลไกเหล่านี้ในสมดุลพลังงานของประเทศกำลังการผลิตติดตั้งทั้งหมดของมอเตอร์ขับเคลื่อนสำหรับปั๊ม พัดลม และคอมเพรสเซอร์อยู่ที่ประมาณ 20% ของกำลังการผลิตของโรงไฟฟ้าทั้งหมด ในขณะที่พัดลมเพียงอย่างเดียวใช้ไฟฟ้าประมาณ 10% ของไฟฟ้าทั้งหมดที่ผลิตในประเทศ
คุณสมบัติการทำงานของกลไกการเหวี่ยงถูกนำเสนอในรูปแบบของการพึ่งพาของหัว H บนอัตราการไหล Q และกำลัง P บนอัตราการไหล Q ในโหมดการทำงานนิ่ง หัวที่สร้างโดยกลไกการเหวี่ยงจะสมดุลโดย แรงดันของเครือข่ายไฮโดรหรือแอโรไดนามิกซึ่งส่งของเหลวหรือก๊าซ
ส่วนประกอบคงที่ของความดันถูกกำหนดสำหรับปั๊ม — โดยความแตกต่างทางธรณีระหว่างระดับของผู้ใช้และปั๊ม สำหรับแฟน ๆ — แหล่งท่องเที่ยวทางธรรมชาติ สำหรับพัดลมและคอมเพรสเซอร์ — จากแรงดันก๊าซอัดในเครือข่าย (อ่างเก็บน้ำ)
จุดตัดของลักษณะ Q-H ของปั๊มและเครือข่ายกำหนดพารามิเตอร์ H-Hn และ Q — Qn การควบคุมอัตราการไหล Q ของปั๊มที่ทำงานด้วยความเร็วคงที่มักจะดำเนินการโดยวาล์วที่เต้าเสียบและนำไปสู่การเปลี่ยนแปลงลักษณะของเครือข่ายอันเป็นผลมาจากอัตราการไหล QA * <1 สอดคล้องกับ จุดตัดกับลักษณะของปั๊ม
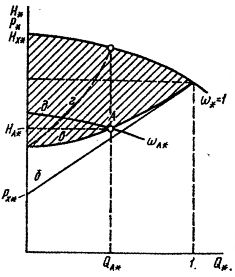
ข้าว. 2. ลักษณะ Q-H ของหน่วยสูบน้ำ
โดยเปรียบเทียบกับวงจรไฟฟ้า การควบคุมการไหลผ่านวาล์วจะคล้ายกับการควบคุมกระแสโดยการเพิ่มความต้านทานไฟฟ้าของวงจร เห็นได้ชัดว่าวิธีการควบคุมนี้ไม่ได้ผลจากมุมมองด้านพลังงาน เนื่องจากมีการสูญเสียพลังงานที่ไม่ก่อผลในองค์ประกอบควบคุม (ตัวต้านทาน วาล์ว) การสูญเสียวาล์วมีลักษณะตามพื้นที่สีเทาในรูปที่ 1.
เช่นเดียวกับในวงจรไฟฟ้า การควบคุมแหล่งพลังงานจะประหยัดกว่าผู้ใช้ ในกรณีนี้ กระแสโหลดในวงจรไฟฟ้าจะลดลงเนื่องจากแรงดันแหล่งจ่ายลดลง ในเครือข่ายไฮดรอลิกและแอโรไดนามิก ผลที่คล้ายกันนี้เกิดขึ้นได้จากการลดแรงดันที่เกิดจากกลไก ซึ่งรับรู้ได้โดยการลดความเร็วของใบพัด
เมื่อความเร็วเปลี่ยนลักษณะการทำงานของกลไกแรงเหวี่ยงจะเปลี่ยนไปตามกฎของความคล้ายคลึงกันซึ่งมีรูปแบบ: Q * = ω *, H * = ω *2, P * = ω *3
ความเร็วใบพัดของปั๊มที่คุณลักษณะจะผ่านจุด A:
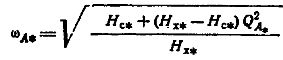
การแสดงออกของกำลังที่ปั๊มใช้ระหว่างการควบคุมความเร็วคือ:

การพึ่งพากำลังสองของช่วงเวลากับความเร็วเป็นลักษณะเฉพาะสำหรับพัดลมเป็นหลัก เนื่องจากส่วนประกอบคงที่ของส่วนหัวที่กำหนดโดยแรงขับตามธรรมชาตินั้นมีขนาดเล็กกว่า Hx อย่างมาก ในเอกสารทางเทคนิคบางครั้งใช้การพึ่งพาโดยประมาณของช่วงเวลากับความเร็วซึ่งคำนึงถึงคุณสมบัติของกลไกการหมุนเหวี่ยงนี้:
M* = ω *น
โดยที่ n = 2 ที่ Hc = 0 และ nHc> 0 การคำนวณและการทดลองแสดงว่า n=2 — 5 และค่าที่มากเป็นลักษณะของคอมเพรสเซอร์ที่ทำงานในเครือข่ายที่มีแรงดันย้อนกลับมาก
การวิเคราะห์โหมดการทำงานของปั๊มที่ความเร็วคงที่และความเร็วแปรผันแสดงให้เห็นว่าการใช้พลังงานส่วนเกินที่ ω= const มีความสำคัญมาก ตัวอย่างเช่น ผลลัพธ์ของการคำนวณโหมดการทำงานของปั๊มพร้อมพารามิเตอร์แสดงด้านล่าง Hx * = 1.2; Px*= 0.3 บนเครือข่ายที่มีแรงดันย้อนกลับต่างกัน Зс:
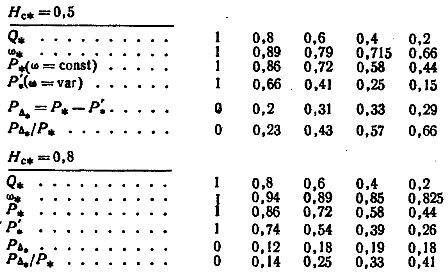
ข้อมูลที่ได้รับแสดงให้เห็นว่าไดรฟ์ไฟฟ้าที่มีการควบคุมสามารถลดการใช้ไฟฟ้าที่ใช้แล้วได้อย่างมาก: มากถึง 66% ในกรณีแรกและมากถึง 41% ในกรณีที่สอง ในทางปฏิบัติ ผลกระทบนี้สามารถกลายเป็นสูงขึ้น เนื่องจากด้วยเหตุผลหลายประการ (การไม่มีหรือการทำงานผิดปกติของวาล์ว, การสั่งงานด้วยมือ) การควบคุมโดยวาล์วจะไม่ถูกนำไปใช้เลย ซึ่งไม่เพียงทำให้ปริมาณการใช้ไฟฟ้าเพิ่มขึ้นเท่านั้น แต่ยังรวมถึง ความพยายามและค่าใช้จ่ายที่มากเกินไปในเครือข่ายไฮดรอลิก
ประเด็นด้านพลังงานของกลไกการหมุนเหวี่ยงที่ทำหน้าที่เดี่ยวในเครือข่ายที่มีพารามิเตอร์คงที่ได้ถูกกล่าวถึงข้างต้นแล้ว ในทางปฏิบัติมีการทำงานแบบขนานของกลไกแรงเหวี่ยงและเครือข่ายมักมีพารามิเตอร์ผันแปร ตัวอย่างเช่น ความต้านทานแอโรไดนามิกของเครือข่ายการขุดเปลี่ยนแปลงตามความยาวของผนัง ความต้านทานทางอุทกพลศาสตร์ของเครือข่ายน้ำประปาถูกกำหนดโดยโหมดการใช้น้ำซึ่งเปลี่ยนแปลงในระหว่างวัน เป็นต้น
ด้วยการทำงานแบบขนานของกลไกแรงเหวี่ยง เป็นไปได้สองกรณี:
1) ความเร็วของกลไกทั้งหมดถูกควบคุมพร้อมกันและพร้อมกัน
2) ความเร็วของกลไกหนึ่งหรือส่วนหนึ่งของกลไกถูกควบคุม
หากพารามิเตอร์เครือข่ายคงที่ ในกรณีแรก กลไกทั้งหมดสามารถถูกพิจารณาว่าเทียบเท่ากันซึ่งความสัมพันธ์ข้างต้นทั้งหมดนั้นถูกต้อง ในกรณีที่สอง ความดันของส่วนที่ไม่ได้รับการควบคุมของกลไกมีผลเช่นเดียวกันกับส่วนที่ควบคุมเป็นความดันย้อนกลับและมีความสำคัญมาก ซึ่งเป็นสาเหตุที่การประหยัดไฟฟ้าที่นี่ไม่เกิน 10-15% ของพลังงานที่ระบุ ของเครื่อง
พารามิเตอร์เครือข่ายแบบแปรผันทำให้การวิเคราะห์ความร่วมมือของกลไกแรงเหวี่ยงกับเครือข่ายมีความซับซ้อนอย่างมาก ในกรณีนี้ ประสิทธิภาพพลังงานของไดรฟ์ไฟฟ้าควบคุมสามารถกำหนดได้ในรูปแบบของพื้นที่ที่มีขอบเขตสอดคล้องกับค่าจำกัดของพารามิเตอร์เครือข่ายและความเร็วของกลไกแรงเหวี่ยง
ดูเพิ่มเติมในหัวข้อนี้: VLT AQUA ตัวแปลงความถี่ไดรฟ์สำหรับเครื่องสูบน้ำ