หลักการทำงานของตัวแปลงความถี่และเกณฑ์การเลือกสำหรับผู้ใช้
 คำอธิบายโดยย่อของวัตถุประสงค์ หลักการทำงาน และเกณฑ์สำหรับการเลือกตัวแปลงความถี่เป็นอุปกรณ์ควบคุมสำหรับมอเตอร์ไฟฟ้าแบบอะซิงโครนัส
คำอธิบายโดยย่อของวัตถุประสงค์ หลักการทำงาน และเกณฑ์สำหรับการเลือกตัวแปลงความถี่เป็นอุปกรณ์ควบคุมสำหรับมอเตอร์ไฟฟ้าแบบอะซิงโครนัส
มอเตอร์เหนี่ยวนำกรงกระรอก ปัจจุบันเป็นอุปกรณ์ขนาดใหญ่และเชื่อถือได้มากที่สุดในการควบคุมเครื่องจักรและกลไกต่างๆ แต่ทุกเหรียญมีด้านพลิก
ข้อเสียเปรียบหลักสองประการของมอเตอร์เหนี่ยวนำคือความเป็นไปไม่ได้ของความเรียบง่าย การควบคุมความเร็วของโรเตอร์, กระแสเริ่มต้นที่ใหญ่มาก — ห้าหรือเจ็ดเท่าของค่าเล็กน้อย หากใช้เฉพาะอุปกรณ์ควบคุมเชิงกล ข้อเสียเหล่านี้นำไปสู่การสูญเสียพลังงานจำนวนมากและโหลดเชิงกลแบบช็อต สิ่งนี้ส่งผลเสียอย่างมากต่ออายุการใช้งานของอุปกรณ์
ตัวแปลงความถี่

ตัวแปลงความถี่ ด้วยการควบคุมความกว้างพัลส์ (PE พร้อม PWM) ช่วยลดกระแสไหลเข้า 4-5 เท่า ช่วยให้สตาร์ทมอเตอร์เหนี่ยวนำได้อย่างราบรื่นและควบคุมไดรฟ์ตามอัตราส่วนแรงดัน/ความถี่ที่กำหนด
ตัวแปลงความถี่ช่วยประหยัดพลังงานได้ถึง 50% อนุญาตให้ป้อนกลับระหว่างอุปกรณ์ข้างเคียงได้ เช่น อุปกรณ์ปรับแต่งเองสำหรับงานและเปลี่ยนสภาพการทำงานของระบบทั้งหมด
หลักการทำงานของตัวแปลงความถี่
ตัวแปลงความถี่ PWM คือ อินเวอร์เตอร์แปลงคู่… ขั้นแรก แรงดันไฟหลัก 220 หรือ 380 V ถูกแก้ไขโดยสะพานไดโอดอินพุต จากนั้นจึงปรับให้เรียบและกรองโดยใช้ตัวเก็บประจุ
นี่คือขั้นตอนแรกของการเปลี่ยนแปลง ในขั้นตอนที่สอง จากแรงดันคงที่ โดยใช้ไมโครวงจรควบคุมและบริดจ์เอาต์พุต สวิตช์ IGBTจะเกิดลำดับ PWM ที่มีความถี่และรอบการทำงานที่แน่นอน ที่เอาต์พุตของตัวแปลงความถี่จะมีการออกแพ็คเก็ตของพัลส์สี่เหลี่ยม แต่เนื่องจากความเหนี่ยวนำของขดลวดสเตเตอร์ของมอเตอร์เหนี่ยวนำจึงรวมเข้าด้วยกันและในที่สุดก็เปลี่ยนเป็นแรงดันไฟฟ้าใกล้กับไซน์ไซด์
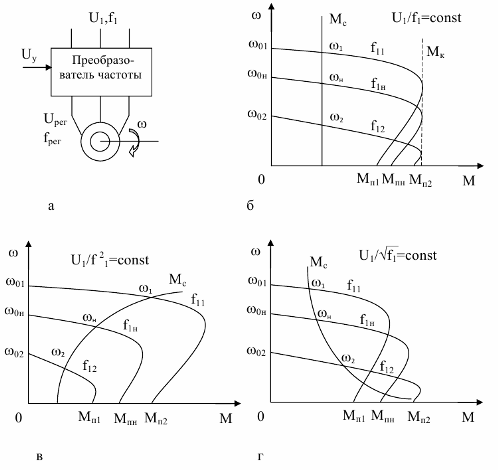 ลักษณะทางกลของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่มีการควบคุมความถี่ของความเร็ว: a — แผนภาพการเชื่อมต่อ; b - ลักษณะเฉพาะของโหลดที่มีโมเมนต์ต้านทานคงที่คงที่ c - ลักษณะการโหลดของพัดลม d - ลักษณะแรงบิดของโหลดคงที่แปรผกผันกับความเร็วเชิงมุมของการหมุน
ลักษณะทางกลของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่มีการควบคุมความถี่ของความเร็ว: a — แผนภาพการเชื่อมต่อ; b - ลักษณะเฉพาะของโหลดที่มีโมเมนต์ต้านทานคงที่คงที่ c - ลักษณะการโหลดของพัดลม d - ลักษณะแรงบิดของโหลดคงที่แปรผกผันกับความเร็วเชิงมุมของการหมุน
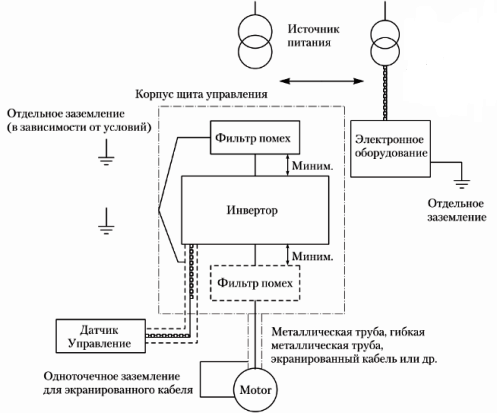 วงจรทั่วไปสำหรับการเปิดเครื่องแปลงความถี่
วงจรทั่วไปสำหรับการเปิดเครื่องแปลงความถี่ 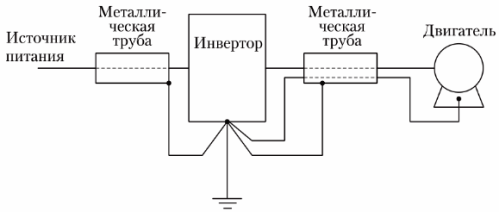 ตัวอย่างการเชื่อมต่อสายไฟ (สายเคเบิล) ในวงจรตัวแปลงความถี่
ตัวอย่างการเชื่อมต่อสายไฟ (สายเคเบิล) ในวงจรตัวแปลงความถี่
เกณฑ์สำหรับการเลือกตัวแปลงความถี่

โดยวิธีการควบคุม
ทิ้งคอนเวอร์เตอร์ที่ไม่เหมาะสมในแง่ของพลังงาน ประเภทประสิทธิภาพ ความจุเกิน ฯลฯ ทันที ตามประเภทของการจัดการที่คุณต้องตัดสินใจว่าจะเลือกอะไร การควบคุมสเกลาร์หรือเวกเตอร์.
ตัวแปลงความถี่สมัยใหม่ส่วนใหญ่ใช้การควบคุมแบบเวกเตอร์ แต่ตัวแปลงความถี่ดังกล่าวมีราคาแพงกว่าตัวแปลงความถี่แบบสเกลาร์
การควบคุมเวกเตอร์ช่วยให้ควบคุมได้แม่นยำยิ่งขึ้นโดยลดข้อผิดพลาดแบบคงที่ โหมดสเกลาร์รองรับอัตราส่วนคงที่ระหว่างแรงดันเอาต์พุตและความถี่เอาต์พุตเท่านั้น แต่สำหรับพัดลม นี่ค่อนข้างเพียงพอ
นับตั้งแต่ก่อตั้งขึ้น การควบคุมเวกเตอร์ได้กลายเป็นกลยุทธ์การควบคุมที่ได้รับความนิยมอย่างมากสำหรับมอเตอร์เหนี่ยวนำ ปัจจุบัน ตัวแปลงความถี่ส่วนใหญ่ใช้การควบคุมเวกเตอร์หรือแม้แต่การควบคุมเวกเตอร์แบบไร้เซ็นเซอร์ (แนวโน้มนี้พบได้ในตัวแปลงความถี่ที่ใช้การควบคุมแบบสเกลาร์แต่เดิมและไม่มีขั้วต่อสำหรับเชื่อมต่อเซ็นเซอร์ความเร็ว)
หลักการพื้นฐานของการควบคุมเวกเตอร์ประกอบด้วยการควบคุมกระแสแม่เหล็กของมอเตอร์และกระแสพื้นที่สี่เหลี่ยมจัตุรัสที่แยกจากกันโดยอิสระ ซึ่งแรงบิดเชิงกลของเพลาเป็นสัดส่วน กระแสแม่เหล็กจะกำหนดค่าของการเชื่อมโยงโรเตอร์เป็นศูนย์ฟลักซ์และคงที่
เมื่อความเร็วคงที่ ค่าเซ็ตพอยต์ปัจจุบันของพื้นที่สี่เหลี่ยมจัตุรัสจะถูกสร้างขึ้นโดยใช้ตัวควบคุม PI แยกต่างหาก ซึ่งอินพุตเป็นค่าที่ไม่ตรงกันระหว่างความเร็วมอเตอร์ที่ต้องการและที่วัดได้ ดังนั้น กระแสพื้นที่สี่เหลี่ยมจัตุรัสจึงถูกตั้งค่าไว้ที่ระดับต่ำสุดเสมอ เพื่อให้มีแรงบิดเชิงกลที่เพียงพอเพื่อรักษาความเร็วที่ตั้งไว้ ดังนั้นการควบคุมเวกเตอร์จึงมีประสิทธิภาพการใช้พลังงานสูง
ผ่านอำนาจ
หากกำลังของอุปกรณ์ใกล้เคียงกันให้เลือกตัวแปลงจาก บริษัท เดียวกันที่มีความจุตามกำลังโหลดสูงสุด สิ่งนี้จะช่วยให้มั่นใจถึงความสามารถในการใช้แทนกันได้และทำให้การบำรุงรักษาอุปกรณ์ง่ายขึ้น ขอแนะนำให้ศูนย์บริการของตัวแปลงความถี่ที่เลือกอยู่ในเมืองของคุณ
ผ่านแรงดันไฟหลัก
เลือกคอนเวอร์เตอร์ที่มีช่วงแรงดันไฟฟ้ากว้างที่สุดเท่าที่จะเป็นไปได้เสมอ ทั้งขาลงและขาขึ้น ความจริงก็คือสำหรับเครือข่ายท้องถิ่น คำว่ามาตรฐานสามารถเรียกเสียงหัวเราะได้ทั้งน้ำตา หากแรงดันไฟฟ้าต่ำจะทำให้ตัวแปลงความถี่หยุดทำงาน แรงดันไฟฟ้าที่เพิ่มขึ้นอาจทำให้ตัวเก็บประจุด้วยไฟฟ้าหลักระเบิดและอินพุตของอุปกรณ์ล้มเหลว
โดยช่วงการปรับความถี่

ตามจำนวนอินพุตควบคุม
ต้องใช้อินพุตแยกเพื่อป้อนคำสั่งควบคุม (เริ่ม หยุด ย้อนกลับ หยุด ฯลฯ) จำเป็นต้องมีอินพุตแบบอะนาล็อกสำหรับสัญญาณป้อนกลับ (การตั้งค่าและการตั้งค่าของไดรฟ์ระหว่างการทำงาน) จำเป็นต้องใช้อินพุตดิจิตอลเพื่อป้อนสัญญาณความถี่สูงจากเซ็นเซอร์ความเร็วและตำแหน่งแบบดิจิทัล (ตัวเข้ารหัส). จำนวนอินพุตต้องไม่มากเกินไป แต่ยิ่งมีอินพุตมาก ระบบก็ยิ่งสร้างความซับซ้อนได้มากขึ้นและมีราคาแพงขึ้น
ตามจำนวนสัญญาณขาออก
เอาต์พุตแยกใช้สำหรับส่งสัญญาณเอาต์พุตสำหรับเหตุการณ์ต่างๆ (สัญญาณเตือน ความร้อนสูงเกินไป แรงดันไฟฟ้าอินพุตสูงหรือต่ำกว่าระดับ สัญญาณข้อผิดพลาด ฯลฯ) เอาต์พุตอะนาล็อกใช้เพื่อสร้างระบบป้อนกลับที่ซับซ้อน คำแนะนำการเลือกคล้ายกับย่อหน้าก่อนหน้า
ควบคุมบัส
อุปกรณ์ที่คุณจะควบคุมตัวแปลงความถี่ต้องมีบัสและจำนวนอินพุต/เอาต์พุตเหมือนกันกับตัวแปลงความถี่ที่เลือก เว้นที่ว่างไว้สำหรับอินพุตและเอาต์พุตสำหรับการอัปเกรดในอนาคต
ภายใต้การรับประกัน
ระยะเวลาการรับประกันช่วยให้คุณประเมินความน่าเชื่อถือของตัวแปลงความถี่ทางอ้อมได้ โดยปกติคุณควรเลือกตัวแปลงความถี่ที่มีแผนระยะยาวผู้ผลิตบางรายจัดเตรียมกรณีความเสียหายที่ไม่อยู่ในการรับประกันโดยเฉพาะ อ่านเอกสารอย่างละเอียดเสมอ และค้นหาความคิดเห็นเกี่ยวกับรุ่นอุปกรณ์และผู้ผลิตทางออนไลน์ สิ่งนี้จะช่วยให้คุณเลือกได้ถูกต้อง อย่าสำรองเงินเพื่อการบริการที่มีคุณภาพและการฝึกอบรมพนักงาน
 ตัวแปลงความถี่บนขาตั้ง
ตัวแปลงความถี่บนขาตั้ง
ความจุเกิน
ในการประมาณครั้งแรก ควรเลือกกำลังของตัวแปลงความถี่มากกว่ากำลังมอเตอร์ 10-15% กระแสของตัวแปลงควรสูงกว่ากระแสที่กำหนดของมอเตอร์และสูงกว่ากระแสของการโอเวอร์โหลดที่เป็นไปได้เล็กน้อย
ในคำอธิบายของกลไกเฉพาะมักจะระบุกระแสเกินและระยะเวลาของการไหล อ่านเอกสาร! สิ่งนี้จะทำให้คุณเพลิดเพลินและอาจป้องกันไม่ให้อุปกรณ์เสียหายในอนาคต หากไดรฟ์มีลักษณะโหลดช็อก (สูงสุด) (โหลดเป็นเวลา 2-3 วินาที) ก็จำเป็นต้องเลือกตัวแปลงสำหรับกระแสสูงสุด รับอัตรากำไรขั้นต้น 10% อีกครั้ง
ดูเพิ่มเติมในหัวข้อนี้: VLT AQUA ตัวแปลงความถี่ไดรฟ์สำหรับเครื่องสูบน้ำ