แรงบิดของมอเตอร์เหนี่ยวนำ
แรงบิดที่พัฒนาขึ้นบนเพลาของมอเตอร์เหนี่ยวนำภายใต้สภาวะความเร็วของโรเตอร์เป็นศูนย์ (เมื่อโรเตอร์หยุดนิ่ง) และกระแสที่เกิดขึ้นในขดลวดสเตเตอร์เรียกว่า แรงบิดเริ่มต้นของมอเตอร์เหนี่ยวนำ
ช่วงเวลาเริ่มต้นบางครั้งเรียกอีกอย่างว่าช่วงเวลาเริ่มต้นหรือช่วงเวลาเริ่มต้น ในกรณีนี้ สันนิษฐานว่าแรงดันและความถี่ของแรงดันแหล่งจ่ายใกล้เคียงกับค่าเล็กน้อย และขดลวดเชื่อมต่ออย่างถูกต้อง ในโหมดการทำงานที่ได้รับการจัดอันดับ เอ็นจิ้นนี้จะทำงานได้ตรงตามที่ผู้พัฒนาคาดไว้
ค่าตัวเลขของแรงบิดเริ่มต้น

แรงบิดเริ่มต้นคำนวณโดยสูตรข้างต้น ในพาสปอร์ตของมอเตอร์ไฟฟ้า (พาสปอร์ตจัดทำโดยผู้ผลิต) มีการระบุแรงบิดเริ่มต้นหลายเท่า
โดยทั่วไปแล้วขนาดของการเพิ่มขึ้นจะอยู่ในช่วง 1.5 ถึง 6 ขึ้นอยู่กับประเภทของเครื่องยนต์ และเมื่อเลือกมอเตอร์ไฟฟ้าตามความต้องการของคุณ สิ่งสำคัญคือต้องแน่ใจว่าแรงบิดเริ่มต้นนั้นมากกว่าแรงบิดคงที่ของภาระการออกแบบที่วางแผนไว้บนเพลาหากไม่ตรงตามเงื่อนไขนี้ เครื่องยนต์ก็จะไม่สามารถพัฒนาแรงบิดในการทำงานตามภาระของคุณ นั่นคือจะไม่สามารถสตาร์ทได้ตามปกติและเร่งความเร็วไปที่ความเร็วที่กำหนด
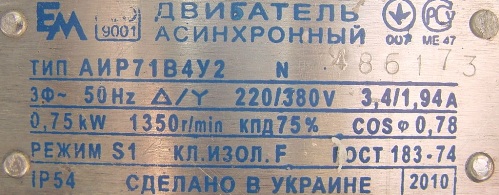
ลองดูสูตรอื่นเพื่อหาแรงบิดเริ่มต้น มันจะเป็นประโยชน์สำหรับคุณสำหรับการคำนวณทางทฤษฎี ที่นี่ก็เพียงพอที่จะทราบกำลังของเพลาในหน่วยกิโลวัตต์และความเร็วที่กำหนด — ข้อมูลทั้งหมดเหล่านี้ระบุไว้บนป้ายชื่อ (บนป้ายชื่อ) กำลังไฟพิกัด P2 ความเร็วพิกัด F1 นี่คือสูตรนี้:

สูตรต่อไปนี้ใช้ในการหา P2 ต้องคำนึงถึงการเลื่อนหลุด กระแสไหลเข้า และแรงดันของแหล่งจ่าย ซึ่งทั้งหมดนี้แสดงอยู่บนป้ายชื่อ อย่างที่คุณเห็นทุกอย่างค่อนข้างง่าย เห็นได้ชัดจากสูตรว่าโดยทั่วไปแล้วแรงบิดเริ่มต้นสามารถเพิ่มได้สองวิธี: โดยการเพิ่มกระแสเริ่มต้นหรือโดยการเพิ่มแรงดันไฟฟ้า

อย่างไรก็ตาม ลองใช้วิธีที่ง่ายที่สุดและคำนวณค่าแรงบิดเริ่มต้นสำหรับเครื่องยนต์ซีรีส์ AIR สามเครื่อง เราจะใช้พารามิเตอร์ของชุดแรงบิดเริ่มต้นและค่าแรงบิดเล็กน้อย นั่นคือ เราจะใช้สูตรแรก ผลลัพธ์ของการคำนวณแสดงในตาราง:
ประเภทเครื่องยนต์ แรงบิดสูงสุด Nm อัตราส่วนของแรงบิดเริ่มต้นต่อแรงบิดสูงสุด แรงบิดเริ่มต้น Nm AIRM132M2 36 2.5 90 AIR180S2 72 2 144 AIR180M2 97 2.4 232.8
บทบาทของแรงบิดเริ่มต้นของมอเตอร์เหนี่ยวนำ (กระแสเริ่มต้น)
บ่อยครั้งที่มอเตอร์เชื่อมต่อโดยตรงกับเครือข่ายทำการสลับด้วยสตาร์ทแม่เหล็ก: แรงดันไฟฟ้าของเครือข่ายถูกนำไปใช้กับขดลวดสนามแม่เหล็กหมุนจะถูกสร้างขึ้นบนสเตเตอร์และอุปกรณ์เริ่มทำงาน
ในกรณีนี้ กระแสเริ่มต้น ณ เวลาที่เริ่มต้นเป็นสิ่งที่หลีกเลี่ยงไม่ได้และจะเกินกระแสที่กำหนด 5-7 เท่า และระยะเวลาที่เกินจะขึ้นอยู่กับกำลังมอเตอร์และกำลังโหลด: มอเตอร์ที่ทรงพลังกว่าจะสตาร์ทนานขึ้น สเตเตอร์ของพวกมัน ขดลวดใช้เวลานานเกินในปัจจุบัน
มอเตอร์กำลังต่ำ (สูงสุด 3 กิโลวัตต์) สามารถทนต่อไฟกระชากเหล่านี้ได้อย่างง่ายดาย และกริดสามารถทนต่อไฟกระชากเล็กน้อยในระยะสั้นเหล่านี้ได้อย่างง่ายดาย เนื่องจากกริดมีพลังงานสำรองอยู่เสมอ ดังนั้นมักจะเปิดปั๊มและพัดลมขนาดเล็กเครื่องตัดโลหะและเครื่องใช้ไฟฟ้าในครัวเรือนโดยตรงโดยไม่ต้องกังวลกับกระแสไฟเกิน ตามกฎแล้ว ขดลวดสเตเตอร์ของมอเตอร์ของอุปกรณ์ประเภทนี้จะเชื่อมต่อตามรูปแบบ "ดาว" บนแรงดันไฟฟ้าสามเฟสจาก 380 โวลต์หรือ «สามเหลี่ยม» — สำหรับ 220 โวลต์
หากคุณกำลังจัดการกับมอเตอร์ทรงพลังตั้งแต่ 10 กิโลวัตต์ขึ้นไป คุณจะไม่สามารถเชื่อมต่อมอเตอร์ดังกล่าวกับเครือข่ายได้โดยตรง กระแสที่ไหลเข้าในเวลาที่เริ่มต้นจะต้องถูกจำกัด มิฉะนั้น เครือข่ายจะประสบกับการโอเวอร์โหลดอย่างมาก ซึ่งอาจนำไปสู่ "แรงดันไฟฟ้าตกผิดปกติ" ที่เป็นอันตรายได้
ทำลายเส้นทางที่ จำกัด ในปัจจุบัน
วิธีที่ง่ายที่สุดในการจำกัดกระแสเริ่มต้นคือการเริ่มที่แรงดันไฟฟ้าที่ลดลง ขดลวดเพียงแค่เปลี่ยนจากเดลต้าเป็นสตาร์เมื่อสตาร์ทเครื่อง จากนั้นกลับเป็นเดลต้าเมื่อมอเตอร์มีความเร็วเพิ่มขึ้นการสลับเกิดขึ้นไม่กี่วินาทีหลังจากการสตาร์ท เช่น การถ่ายทอดเวลา
ด้วยวิธีแก้ปัญหาดังกล่าว แรงบิดเริ่มต้นก็จะลดลงเช่นกัน และการพึ่งพาจะเป็นกำลังสอง: เมื่อแรงดันไฟฟ้าลดลง จะเป็น 1.72 เท่า แรงบิดจะลดลง 3 เท่า ด้วยเหตุนี้ การสตาร์ทด้วยแรงดันไฟฟ้าที่ลดลงจึงเหมาะสำหรับการใช้งานที่สามารถสตาร์ทได้ด้วยโหลดขั้นต่ำบนเพลามอเตอร์เหนี่ยวนำ (เช่น การสตาร์ทเลื่อย)
โหลดหนัก เช่น สายพานลำเลียง ต้องการวิธีอื่นในการจำกัดกระแสไหลเข้า ที่นี่วิธีรีโอสแตทเหมาะสมกว่าซึ่งช่วยให้คุณลดกระแสที่ไหลเข้าโดยไม่ลดแรงบิด
วิธีนี้เหมาะมากสำหรับมอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์แบบพัน ซึ่งรีโอสแตตรวมอยู่ในวงจรการพันของโรเตอร์อย่างสะดวก และกระแสการทำงานจะถูกปรับเป็นระยะ ทำให้ได้การเริ่มต้นที่ราบรื่นมาก ด้วยความช่วยเหลือของรีโอสแตท คุณสามารถปรับความเร็วการทำงานของมอเตอร์ได้ทันที (ไม่ใช่เฉพาะในเวลาที่สตาร์ท)
แต่วิธีที่มีประสิทธิภาพที่สุดในการสตาร์ทมอเตอร์แบบอะซิงโครนัสอย่างปลอดภัยยังคงเริ่มต้นอยู่ ตัวแปลงความถี่… แรงดันและความถี่จะถูกปรับโดยอัตโนมัติโดยคอนเวอร์เตอร์เอง ทำให้เกิดสภาวะที่เหมาะสมที่สุดสำหรับมอเตอร์ การเลี้ยวมีความเสถียรในขณะที่ไม่รวมไฟฟ้าช็อตโดยพื้นฐาน