เครื่องไฟฟ้ากระแสสลับ
เครื่องจักรไฟฟ้าใช้ในการเปลี่ยนพลังงานกลเป็นพลังงานไฟฟ้า (เครื่องกำเนิดไฟฟ้ากระแสสลับและกระแสตรง) และในทางกลับกัน (มอเตอร์ไฟฟ้า)
ในทุกกรณีเหล่านี้ การค้นพบหลักๆ สามประการในด้านแม่เหล็กไฟฟ้าถูกนำมาใช้: ปรากฏการณ์ปฏิสัมพันธ์เชิงกลของกระแสที่แอมแปร์ค้นพบในปี พ.ศ. 2364 ปรากฏการณ์ของการเหนี่ยวนำแม่เหล็กไฟฟ้าที่ค้นพบโดยฟาราเดย์ในปี พ.ศ. 2374 และบทสรุปทางทฤษฎีของปรากฏการณ์เหล่านี้โดย Lenz (1834) ในกฎที่รู้จักกันดีของเขาเกี่ยวกับทิศทางของกระแสเหนี่ยวนำ (อันที่จริง กฎของ Lenz ทำนายกฎการอนุรักษ์พลังงานสำหรับกระบวนการทางแม่เหล็กไฟฟ้า)

ในการแปลงพลังงานกลเป็นพลังงานไฟฟ้าหรือในทางกลับกัน จำเป็นต้องสร้างการเคลื่อนที่สัมพัทธ์ของวงจรนำไฟฟ้าด้วยกระแสและสนามแม่เหล็ก (แม่เหล็กหรือกระแส)
ในเครื่องจักรไฟฟ้าที่ออกแบบมาเพื่อการทำงานต่อเนื่อง จะใช้การเคลื่อนที่แบบหมุนของส่วนที่เคลื่อนที่ของเครื่อง (โรเตอร์ของเครื่องไฟฟ้ากระแสสลับ) ที่อยู่ภายในส่วนที่อยู่กับที่ (สเตเตอร์)ขดลวดของเครื่องที่ทำหน้าที่สร้างสนามแม่เหล็กเรียกว่าตัวเหนี่ยวนำ และขดลวดที่ไหลไปรอบๆ ด้วยกระแสการทำงานเรียกว่ากระดอง ทั้งสองคำหลังนี้ใช้สำหรับเครื่อง DC เช่นกัน
เพื่อเพิ่มการเหนี่ยวนำแม่เหล็ก ขดลวดของเครื่องจะถูกวางบนตัวแม่เหล็กเฟอร์โรแมกเนติก (เหล็ก เหล็กหล่อ)
เครื่องไฟฟ้าทั้งหมดมีคุณสมบัติย้อนกลับได้นั่นคือสามารถใช้เป็นเครื่องกำเนิดพลังงานไฟฟ้าและมอเตอร์ไฟฟ้าได้

มอเตอร์แบบอะซิงโครนัส
ใช้มอเตอร์แบบอะซิงโครนัส หนึ่งในอาการของการเหนี่ยวนำแม่เหล็กไฟฟ้า… ในรายวิชาฟิสิกส์มีการสาธิตดังนี้
ใต้แผ่นทองแดง ซึ่งสามารถหมุนรอบแกนแนวตั้งผ่านจุดศูนย์กลางได้ วางแม่เหล็กรูปเกือกม้าแนวตั้งที่ขับเคลื่อนให้หมุนรอบแกนเดียวกัน (ไม่รวมปฏิสัมพันธ์เชิงกลระหว่างแผ่นและแม่เหล็ก) ในกรณีนี้ แผ่นดิสก์จะเริ่มหมุนในทิศทางเดียวกับแม่เหล็ก แต่ด้วยความเร็วที่ต่ำกว่า หากคุณเพิ่มภาระเชิงกลบนแผ่นดิสก์ (เช่น โดยการเพิ่มแรงเสียดทานของเพลากับตลับลูกปืนกันรุน) ความเร็วในการหมุนจะลดลง
ความหมายทางกายภาพของปรากฏการณ์นี้อธิบายได้ง่ายโดยทฤษฎีการเหนี่ยวนำแม่เหล็กไฟฟ้า: เมื่อแม่เหล็กหมุน สนามแม่เหล็กหมุนจะถูกสร้างขึ้นซึ่งทำให้เกิดกระแสวนในดิสก์ ขนาดของแม่เหล็กขึ้นอยู่กับสิ่งอื่นที่เท่ากัน บน ความเร็วสัมพัทธ์ของฟิลด์และดิสก์
ตามกฎของ Lenz แผ่นดิสก์จะต้องหมุนไปตามทิศทางของสนาม ในกรณีที่ไม่มีแรงเสียดทาน ดิสก์จะต้องได้รับความเร็วเชิงมุมเท่ากับความเร็วของแม่เหล็ก หลังจากนั้นแรงเคลื่อนไฟฟ้าที่เหนี่ยวนำจะหายไป ในชีวิตจริง แรงเสียดทานเป็นสิ่งที่หลีกเลี่ยงไม่ได้และแผ่นดิสก์จะช้าลงขนาดของมันขึ้นอยู่กับช่วงเวลาเบรกเชิงกลที่ดิสก์ได้รับ
ความแตกต่างระหว่างความเร็วของการหมุนของดิสก์ (โรเตอร์) และความเร็วของการหมุนของสนามแม่เหล็กจะสะท้อนให้เห็นในชื่อของมอเตอร์
หลักการทำงานของมอเตอร์แบบอะซิงโครนัส:
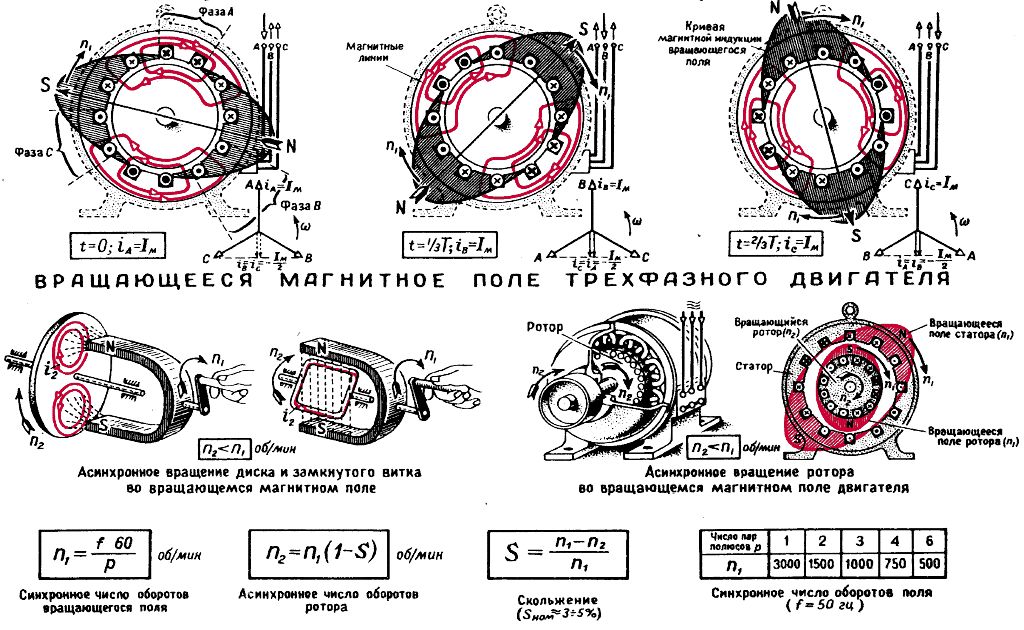
ในมอเตอร์แบบอะซิงโครนัสทางเทคนิค (ส่วนใหญ่มักเป็นแบบสามเฟส) จะมีการสร้างสนามแม่เหล็กหมุน กระแสโพลีเฟสไหลไปรอบ ๆ สเตเตอร์ที่คดเคี้ยว ที่ความถี่ของกระแสสามเฟสคือและจำนวนของขดลวดสเตเตอร์ 3p สนามหมุนทำให้ n = f / p รอบ / วินาที

โรเตอร์ที่หมุนได้จะอยู่ในช่องสเตเตอร์ กลไกการหมุนสามารถเชื่อมต่อกับเพลาได้ ในมอเตอร์ "เซลล์กระรอก" ที่ง่ายที่สุดโรเตอร์ประกอบด้วยระบบของแท่งโลหะตามยาวที่วางอยู่ในร่องของตัวเหล็กทรงกระบอก สายไฟลัดวงจรด้วยวงแหวนสองวง ในการเพิ่มแรงบิดรัศมีของโรเตอร์นั้นใหญ่พอ
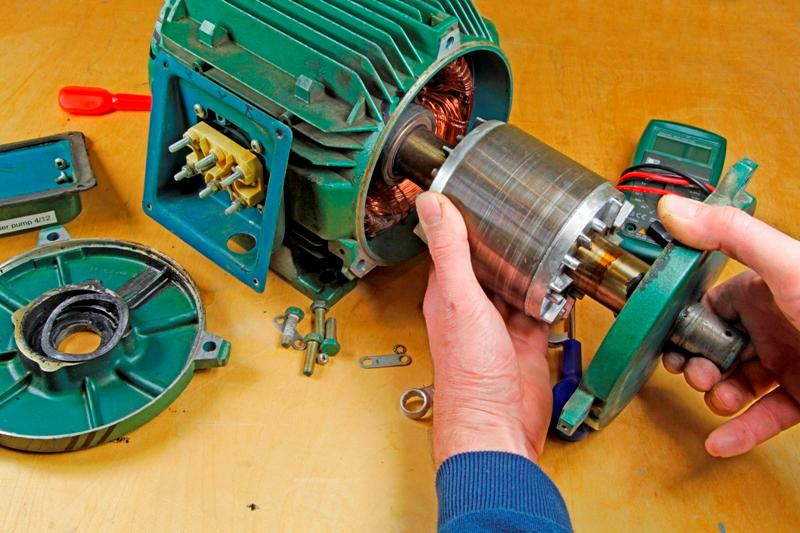
ในการออกแบบมอเตอร์แบบอื่นๆ (โดยทั่วไปคือมอเตอร์กำลังสูง) สายโรเตอร์จะสร้างขดลวดสามเฟสแบบเปิด ปลายของขดลวดจะลัดวงจรในตัวโรเตอร์เอง และตัวนำจะถูกนำออกไปยังวงแหวนสลิปสามอันที่ติดตั้งบนเพลาโรเตอร์และแยกออกจากกัน
รีโอสแตตสามเฟสเชื่อมต่อกับวงแหวนเหล่านี้โดยใช้หน้าสัมผัสแบบเลื่อน (แปรง) ซึ่งทำหน้าที่สตาร์ทมอเตอร์ที่กำลังเคลื่อนที่ หลังจากหมุนมอเตอร์ รีโอสแตตจะถูกถอดออกทั้งหมด และโรเตอร์จะกลายเป็นกรงกระรอก (ดู — มอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์โรเตอร์).

มีแผงขั้วต่อบนตัวเรือนสเตเตอร์ ขดลวดสเตเตอร์ถูกดึงออกมา สามารถรวมได้ ดาวหรือสามเหลี่ยมขึ้นอยู่กับแรงดันไฟหลัก: ในกรณีแรก แรงดันไฟหลักอาจสูงกว่าวินาทีที่สอง 1.73 เท่า
ค่าที่แสดงลักษณะการชะลอตัวสัมพัทธ์ของโรเตอร์เมื่อเทียบกับสนามสเตเตอร์ของมอเตอร์เหนี่ยวนำเรียกว่า ลื่นไถล… มันเปลี่ยนจาก 100% (ในขณะที่สตาร์ทมอเตอร์) เป็นศูนย์ (กรณีที่เหมาะสมที่สุดสำหรับการเคลื่อนที่ของโรเตอร์แบบไม่สูญเสีย)
การกลับทิศทางการหมุนของมอเตอร์เหนี่ยวนำทำได้โดยการสลับตัวนำเชิงเส้นทุกๆ สองตัวของเครือข่ายไฟฟ้าที่จ่ายมอเตอร์

มอเตอร์กรงกระรอกใช้กันอย่างแพร่หลายในอุตสาหกรรม ข้อดีของมอเตอร์แบบอะซิงโครนัสคือความเรียบง่ายของการออกแบบและไม่มีหน้าสัมผัสแบบเลื่อน
จนกระทั่งเมื่อเร็ว ๆ ข้อเสียเปรียบหลักของมอเตอร์ดังกล่าวคือความยากลำบากในการควบคุมความเร็วเพราะหากแรงดันไฟฟ้าของวงจรสเตเตอร์เปลี่ยนไปแรงบิดจะเปลี่ยนไปอย่างรวดเร็ว แต่การเปลี่ยนความถี่ของกระแสไฟนั้นทำได้ยากในทางเทคนิค ปัจจุบันอุปกรณ์ไมโครโปรเซสเซอร์สมัยใหม่ใช้กันอย่างแพร่หลายในการควบคุมความถี่ของกระแสจ่ายเพื่อเปลี่ยนความเร็วของมอเตอร์ — ตัวแปลงความถี่.
เครื่องกำเนิดไฟฟ้ากระแสสลับ
อัลเทอร์เนเตอร์ถูกสร้างขึ้นสำหรับกำลังไฟฟ้าที่สำคัญและไฟฟ้าแรงสูง เช่นเดียวกับเครื่องอะซิงโครนัส พวกมันมีสองขดลวด โดยปกติขดลวดกระดองจะอยู่ในตัวเรือนสเตเตอร์ ตัวเหนี่ยวนำที่สร้างฟลักซ์แม่เหล็กหลักจะติดตั้งอยู่บนโรเตอร์และขับเคลื่อนโดยตัวกระตุ้น ซึ่งเป็นเครื่องกำเนิดไฟฟ้ากระแสตรงขนาดเล็กที่ติดตั้งบนเพลาโรเตอร์ ในเครื่องที่มีกำลังสูง บางครั้งการกระตุ้นจะถูกสร้างขึ้นจากแรงดันไฟฟ้ากระแสสลับที่แก้ไขแล้ว
เนื่องจากไม่สามารถเคลื่อนที่ได้ของกระดองที่คดเคี้ยวปัญหาทางเทคนิคที่เกี่ยวข้องกับการใช้หน้าสัมผัสแบบเลื่อนที่กำลังสูงจึงหายไป
รูปด้านล่างแสดงแผนผังของเครื่องกำเนิดไฟฟ้าแบบเฟสเดียว โรเตอร์มีแปดขั้ว ในสิ่งเหล่านี้คือขดลวดพัน (ไม่แสดงในรูป) ที่ป้อนจากแหล่งภายนอกโดยกระแสตรงที่ใช้กับวงแหวนสลิปที่ติดตั้งบนเพลาโรเตอร์ ขดลวดขั้วถูกพันในลักษณะที่สัญญาณของเสาหันเข้าหาสเตเตอร์สลับกัน จำนวนเสาจะต้องเท่ากัน
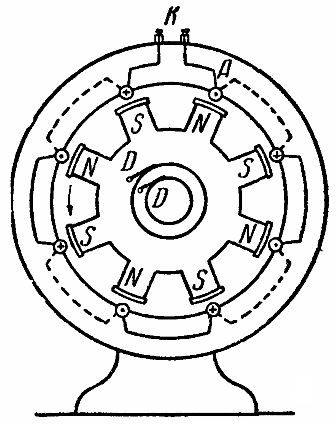
ขดลวดกระดองอยู่ในตัวเรือนสเตเตอร์ สายไฟ "ใช้งาน" ที่ใช้งานได้ยาวนานตั้งฉากกับระนาบของภาพวาดแสดงในรูปวงกลมโดยถูกข้ามด้วยเส้นเหนี่ยวนำแม่เหล็กเมื่อโรเตอร์หมุน
วงกลมแสดงการกระจายทิศทางของสนามไฟฟ้าเหนี่ยวนำในทันที สายเชื่อมต่อที่วิ่งไปทางด้านหน้าของสเตเตอร์จะแสดงเป็นเส้นทึบ และที่ด้านหลังจะมีเส้นประ ที่หนีบ K ใช้เพื่อเชื่อมต่อวงจรภายนอกกับขดลวดสเตเตอร์ ทิศทางการหมุนของโรเตอร์จะแสดงด้วยลูกศร
หากคุณตัดเครื่องตามรัศมีที่ผ่านระหว่างแคลมป์ K และหมุนเป็นระนาบตำแหน่งสัมพัทธ์ของสเตเตอร์ที่คดเคี้ยวและเสาโรเตอร์ (ด้านข้างและแผน) จะแสดงด้วยแผนผัง:
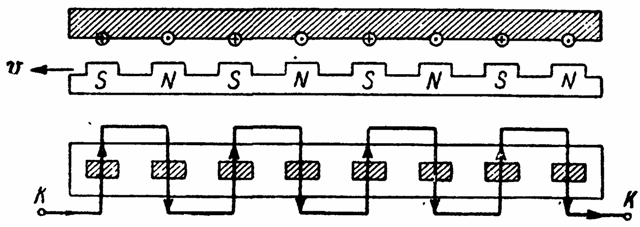
เมื่อพิจารณาจากตัวเลข เราตรวจสอบให้แน่ใจว่าสายไฟที่ใช้งานอยู่ทั้งหมด (ผ่านขั้วของตัวเหนี่ยวนำ) เชื่อมต่อกันเป็นอนุกรมและรวม EMF ที่เหนี่ยวนำเข้าด้วยกัน ขั้นตอนของ EMF ทั้งหมดจะเหมือนกันอย่างเห็นได้ชัดในระหว่างการหมุนโรเตอร์ครบหนึ่งรอบ สายไฟแต่ละเส้นจะได้รับช่วงการเปลี่ยนแปลงทั้งสี่รอบ (และดังนั้นในวงจรด้านนอก)
ถ้าเครื่องใช้ไฟฟ้ามี p คู่ขั้วและโรเตอร์หมุน n รอบต่อวินาที ความถี่ของไฟฟ้ากระแสสลับที่เครื่องได้รับคือ f = pn hz
เนื่องจากความถี่ของ EMF ในเครือข่ายจะต้องคงที่ ความเร็วในการหมุนของโรเตอร์จึงต้องคงที่ เพื่อให้ได้ EMF ของความถี่ทางเทคนิค (50 Hz) สามารถใช้การหมุนที่ค่อนข้างช้าได้หากจำนวนขั้วโรเตอร์มีมากพอ
ในการรับกระแสสามเฟส ขดลวดแยกสามเส้นจะถูกวางไว้ในตัวสเตเตอร์ แต่ละตัวจะหักล้างกันเมื่อเทียบกับอีก 2 คูณ 1 ใน 3 ของระยะส่วนโค้งระหว่างขั้วที่อยู่ติดกัน (ตรงข้าม) ของตัวเหนี่ยวนำ
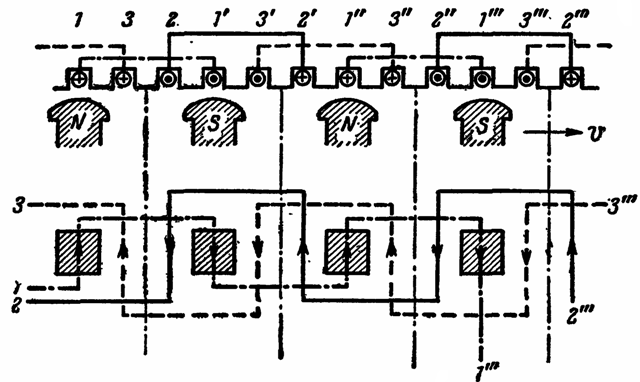
ง่ายต่อการตรวจสอบว่าเมื่อตัวเหนี่ยวนำหมุน EMF จะถูกเหนี่ยวนำในขดลวดที่เปลี่ยนเฟส (ในเวลา) 120 ° ปลายของขดลวดถูกถอดออกจากตัวเครื่องและสามารถเชื่อมต่อแบบสตาร์หรือเดลต้าได้
ในเครื่องกำเนิดไฟฟ้า ความเร็วสัมพัทธ์ของสนามและตัวนำถูกกำหนดโดยเส้นผ่านศูนย์กลางของโรเตอร์ จำนวนรอบของโรเตอร์ต่อวินาที และจำนวนคู่ขั้ว

หากเครื่องกำเนิดไฟฟ้าถูกขับเคลื่อนด้วยกระแสน้ำ เพื่อให้ได้ความถี่ปัจจุบันที่ต้องการจำเป็นต้องเพิ่มจำนวนเสาซึ่งจะต้องเพิ่มขนาดเส้นผ่านศูนย์กลางของโรเตอร์
ด้วยเหตุผลทางเทคนิคหลายประการ เครื่องกำเนิดไฮโดรเจนที่ทรงพลัง โดยปกติจะมีเพลาแนวตั้งและอยู่เหนือกังหันไฮดรอลิกซึ่งทำให้หมุนได้

เครื่องกำเนิดไฟฟ้าแบบขับเคลื่อนด้วยกังหันไอน้ำ — เครื่องกำเนิดไฟฟ้าแบบกังหันมักจะมีความเร็วสูง เพื่อลดแรงเชิงกลพวกมันจึงมีเส้นผ่านศูนย์กลางเล็กและจำนวนเสาที่น้อยตาม ๆ กัน ข้อพิจารณาด้านเทคนิคหลายประการจำเป็นต้องมีการผลิตเครื่องกำเนิดกังหันที่มีเพลาแนวนอน
ถ้าเครื่องกำเนิดไฟฟ้าขับเคลื่อนด้วยเครื่องยนต์สันดาปภายใน จะเรียกว่าเครื่องกำเนิดไฟฟ้าดีเซล เนื่องจากโดยทั่วไปแล้วเครื่องยนต์ดีเซลจะใช้เป็นเครื่องยนต์ที่ใช้เชื้อเพลิงถูกกว่า

เครื่องกำเนิดไฟฟ้าย้อนกลับได้ มอเตอร์ซิงโครนัส
หากใช้แรงดันไฟฟ้าสลับกับขดลวดสเตเตอร์ของเครื่องกำเนิดไฟฟ้าจากแหล่งภายนอก ขั้วของตัวเหนี่ยวนำจะมีปฏิสัมพันธ์กับสนามแม่เหล็กของกระแสที่เกิดขึ้นในสเตเตอร์และแรงบิดจากทิศทางเดียวกันจะทำหน้าที่ บนเสาทั้งหมด
หากโรเตอร์หมุนด้วยความเร็วที่สั้นลงหลังจากครึ่งช่วงของกระแสสลับ ขั้วถัดไปของตัวเหนี่ยวนำ (ตรงข้ามกับขั้วแรก) จะพอดีใต้เส้นลวดของสเตเตอร์ที่คดเคี้ยว จากนั้นสัญญาณของ แรงปฏิสัมพันธ์ระหว่างมันกับกระแส ซึ่งเปลี่ยนทิศทางจะยังคงเหมือนเดิม
ภายใต้เงื่อนไขเหล่านี้ โรเตอร์ซึ่งอยู่ภายใต้อิทธิพลของแรงบิดอย่างต่อเนื่องจะยังคงเคลื่อนที่ต่อไปและจะสามารถขับเคลื่อนกลไกใดๆ ได้ การเอาชนะความต้านทานต่อการเคลื่อนที่ของโรเตอร์จะเกิดขึ้นเนื่องจากเครือข่ายใช้พลังงานและ เครื่องกำเนิดไฟฟ้าจะกลายเป็นมอเตอร์ไฟฟ้า.

อย่างไรก็ตาม ควรสังเกตว่าการเคลื่อนที่ต่อเนื่องเป็นไปได้เฉพาะที่ความเร็วการหมุนที่กำหนดอย่างเคร่งครัด เนื่องจากในกรณีที่มีการเบี่ยงเบนจากโมเมนต์เร่งความเร็วจะกระทำบางส่วนบนแต่ละขั้วของโรเตอร์ โดยเคลื่อนที่ระหว่างตัวนำทั้งสองของ สเตเตอร์ ส่วนหนึ่งของเวลา - หยุด .
ดังนั้นความเร็วของการหมุนของมอเตอร์จะต้องถูกกำหนดอย่างเคร่งครัด - เวลาที่ขั้วจะถูกแทนที่ด้วยอันถัดไปจะต้องตรงกับครึ่งช่วงของกระแสซึ่งเป็นสาเหตุที่เรียกว่ามอเตอร์ดังกล่าว พร้อมกัน.
หากใช้แรงดันไฟฟ้ากระแสสลับกับสเตเตอร์ที่คดเคี้ยวด้วยโรเตอร์แบบอยู่กับที่ แม้ว่าขั้วทั้งหมดของโรเตอร์ในช่วงครึ่งแรกของรอบปัจจุบันจะสัมผัสกับการกระทำของแรงบิดของสัญญาณเดียวกัน แต่เนื่องจากความเฉื่อย โรเตอร์จะไม่มีเวลาเคลื่อนที่ ในครึ่งรอบถัดไป สัญญาณของแรงบิดสำหรับเสาโรเตอร์ทั้งหมดจะเปลี่ยนเป็นตรงกันข้าม
ส่งผลให้โรเตอร์สั่นแต่ไม่สามารถหมุนได้ ดังนั้นมอเตอร์ซิงโครนัสจะต้องถูกพันก่อนนั่นคือนำไปสู่จำนวนรอบปกติและจากนั้นควรเปิดกระแสในขดลวดสเตเตอร์เท่านั้น
การพัฒนามอเตอร์ซิงโครนัสนั้นดำเนินการโดยวิธีการทางกล (ที่กำลังต่ำ) และอุปกรณ์ไฟฟ้าพิเศษ (ที่กำลังสูง)
สำหรับการเปลี่ยนแปลงโหลดเล็กน้อย ความเร็วของมอเตอร์จะเปลี่ยนโดยอัตโนมัติเพื่อปรับให้เข้ากับโหลดใหม่ ดังนั้น เมื่อภาระบนเพลามอเตอร์เพิ่มขึ้น โรเตอร์ก็จะทำงานช้าลงทันที ดังนั้นการเปลี่ยนเฟสระหว่างแรงดันไฟฟ้าของสายและ EMF เหนี่ยวนำที่ตรงกันข้ามซึ่งเหนี่ยวนำโดยตัวเหนี่ยวนำในขดลวดสเตเตอร์จึงเปลี่ยนไป
นอกจากนี้ ปฏิกิริยากระดองยังสร้างการล้างอำนาจแม่เหล็กของตัวเหนี่ยวนำ ดังนั้นกระแสของสเตเตอร์จึงเพิ่มขึ้น ตัวเหนี่ยวนำจะได้สัมผัสกับแรงบิดที่เพิ่มขึ้น และมอเตอร์จะเริ่มหมุนพร้อมกันอีกครั้ง เอาชนะภาระที่เพิ่มขึ้น กระบวนการที่คล้ายกันเกิดขึ้นกับการลดโหลด
ด้วยความผันผวนอย่างรวดเร็วของโหลด ความสามารถในการปรับตัวของมอเตอร์นี้อาจไม่เพียงพอ ความเร็วของมันจะเปลี่ยนไปอย่างมาก มันจะ "หลุดออกจากการซิงโครไนซ์" และหยุดลงในที่สุด ในขณะที่ EMF เหนี่ยวนำที่เหนี่ยวนำในสเตเตอร์จะหายไปและกระแสในนั้นเพิ่มขึ้น อย่างแหลมคม ดังนั้นจึงต้องหลีกเลี่ยงความผันผวนอย่างรวดเร็วของโหลด ในการหยุดมอเตอร์ แน่นอนว่าคุณต้องถอดวงจรสเตเตอร์ออกก่อน แล้วจึงปลดโช้ก เมื่อสตาร์ทเครื่องยนต์คุณต้องปฏิบัติตามลำดับการทำงานย้อนกลับ
มอเตอร์ซิงโครนัสมักใช้เพื่อขับเคลื่อนกลไกที่ทำงานด้วยความเร็วคงที่ นี่คือข้อดีและข้อเสียของมอเตอร์ซิงโครนัสและวิธีการสตาร์ท: มอเตอร์ซิงโครนัสและการใช้งาน
แถบภาพยนตร์เพื่อการศึกษา - "มอเตอร์ซิงโครนัส" สร้างโดยโรงงานอุปกรณ์ช่วยการศึกษาในปี พ.ศ. 2509 คุณสามารถดูได้ที่นี่: แถบฟิล์ม «มอเตอร์ซิงโครนัส»
