ตัวควบคุมแรงดันไฟฟ้าไทริสเตอร์
 ตัวควบคุมแรงดันไฟฟ้าไทริสเตอร์เป็นอุปกรณ์ที่ออกแบบมาเพื่อควบคุมความเร็วและแรงบิดของมอเตอร์ไฟฟ้า การควบคุมความเร็วและแรงบิดนั้นดำเนินการโดยการเปลี่ยนแรงดันไฟฟ้าที่จ่ายให้กับสเตเตอร์ของมอเตอร์และดำเนินการโดยการเปลี่ยนมุมเปิดของไทริสเตอร์ วิธีการควบคุมมอเตอร์นี้เรียกว่าการควบคุมเฟส วิธีนี้เป็นการควบคุมแบบพาราเมตริก (แอมพลิจูด)
ตัวควบคุมแรงดันไฟฟ้าไทริสเตอร์เป็นอุปกรณ์ที่ออกแบบมาเพื่อควบคุมความเร็วและแรงบิดของมอเตอร์ไฟฟ้า การควบคุมความเร็วและแรงบิดนั้นดำเนินการโดยการเปลี่ยนแรงดันไฟฟ้าที่จ่ายให้กับสเตเตอร์ของมอเตอร์และดำเนินการโดยการเปลี่ยนมุมเปิดของไทริสเตอร์ วิธีการควบคุมมอเตอร์นี้เรียกว่าการควบคุมเฟส วิธีนี้เป็นการควบคุมแบบพาราเมตริก (แอมพลิจูด)
ตัวควบคุมแรงดันไฟฟ้าไทริสเตอร์สามารถใช้งานได้ทั้งระบบควบคุมแบบปิดและแบบเปิด เรกูเลเตอร์แบบวงเปิดไม่ได้ให้ประสิทธิภาพการควบคุมความเร็วที่น่าพอใจ จุดประสงค์หลักคือการปรับแรงบิดเพื่อให้ได้โหมดการทำงานที่ต้องการของไดรฟ์ในกระบวนการไดนามิก
รูปแบบที่เรียบง่ายของตัวควบคุมแรงดันไฟฟ้าไทริสเตอร์
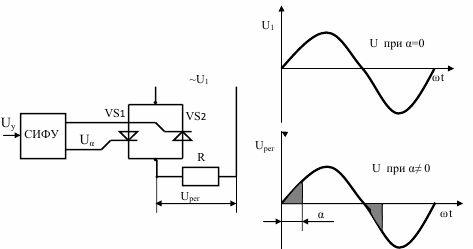
ส่วนพลังงานของตัวควบคุมแรงดันไฟฟ้าไทริสเตอร์แบบเฟสเดียวประกอบด้วยไทริสเตอร์ควบคุมสองตัวที่รับประกันการไหลของกระแสไฟฟ้าบนโหลดในสองทิศทางที่แรงดันไฟฟ้าอินพุตไซน์
ตามกฎแล้วจะใช้ตัวควบคุมไทริสเตอร์แบบวงปิดพร้อมข้อเสนอแนะความเร็วเชิงลบซึ่งทำให้มีลักษณะทางกลที่เข้มงวดเพียงพอของไดรฟ์ในพื้นที่ความเร็วรอบต่ำ
การใช้ตัวควบคุมไทริสเตอร์อย่างมีประสิทธิภาพสูงสุดสำหรับการควบคุมความเร็วและแรงบิด มอเตอร์โรเตอร์แบบอะซิงโครนัส.
วงจรจ่ายไฟของตัวควบคุมไทริสเตอร์
ในรูป 1, a-e แสดงโครงร่างที่เป็นไปได้สำหรับการรวมองค์ประกอบวงจรเรียงกระแสของตัวควบคุมในเฟสเดียว ที่พบมากที่สุดคือแผนภาพในรูปที่ 1, ก. สามารถใช้สำหรับโครงร่างการเชื่อมต่อของขดลวดสเตเตอร์ กระแสที่ยอมให้ผ่านโหลด (ค่า rms) ในวงจรนี้ในโหมดกระแสต่อเนื่องคือ:

โดยที่ Azt คือค่าเฉลี่ยที่อนุญาตของกระแสผ่านไทริสเตอร์
แรงดันไทริสเตอร์ไปข้างหน้าและย้อนกลับสูงสุด

โดยที่ kzap — ปัจจัยด้านความปลอดภัยที่เลือกโดยคำนึงถึงการสลับแรงดันไฟฟ้าเกินที่เป็นไปได้ในวงจร — ค่าที่มีประสิทธิภาพของแรงดันไฟฟ้าสายของเครือข่าย
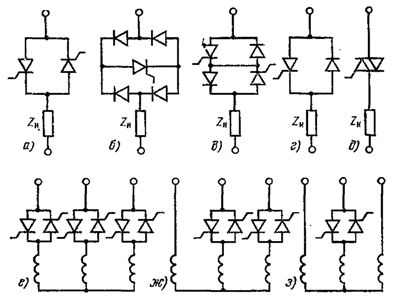
ข้าว. 1. แบบแผนของวงจรไฟฟ้าของตัวควบคุมแรงดันไฟฟ้าของไทริสเตอร์
ในแผนภาพของมะเดื่อ 1b มีไทริสเตอร์เพียงตัวเดียวที่รวมอยู่ในแนวทแยงของบริดจ์ของไดโอดที่ไม่มีการควบคุม อัตราส่วนระหว่างโหลดและกระแสไทริสเตอร์สำหรับวงจรนี้คือ:

ไดโอดที่ไม่มีการควบคุมจะถูกเลือกสำหรับกระแสที่ครึ่งหนึ่งของไทริสเตอร์ แรงดันไปข้างหน้าสูงสุดไปยังไทริสเตอร์
แรงดันย้อนกลับของไทริสเตอร์มีค่าใกล้เคียงกับศูนย์
แผนภาพในรูป 1b มีความแตกต่างจากแบบแผนของรูปที่ 1 แต่สำหรับการสร้างระบบการจัดการ ในแผนภาพของมะเดื่อ 1 และพัลส์ควบคุมสำหรับไทริสเตอร์แต่ละตัวต้องเป็นไปตามความถี่ของแหล่งจ่ายไฟ ในแผนภาพของมะเดื่อ1b ความถี่ของพัลส์ควบคุมสูงเป็นสองเท่า
แผนภาพในรูป 1, c ประกอบด้วยไทริสเตอร์สองตัวและไดโอดสองตัว ถ้าเป็นไปได้ การควบคุม โหลด กระแสและแรงดันไปข้างหน้าสูงสุดของไทริสเตอร์จะคล้ายกับแผนภาพในรูปที่ 1, ก.
แรงดันย้อนกลับในวงจรนี้เนื่องจากการสับเปลี่ยนของไดโอดมีค่าใกล้เคียงกับศูนย์
แผนภาพในรูป 1d ในแง่ของกระแสและแรงดันไปข้างหน้าและย้อนกลับสูงสุดของไทริสเตอร์นั้นคล้ายกับวงจรของรูปที่ 1, ก. แผนภาพในรูป 1, d แตกต่างจากข้อกำหนดที่พิจารณาสำหรับระบบควบคุมเพื่อให้ช่วงการเปลี่ยนแปลงที่จำเป็นของมุมควบคุม thyristor หากนับมุมจากแรงดันเฟสศูนย์ดังนั้นสำหรับวงจรในรูปที่ 1, a-c, ความสัมพันธ์
โดยที่ φ- มุมเฟสของโหลด
สำหรับวงจรตามรูป 1, d, อัตราส่วนที่คล้ายกันจะอยู่ในรูปแบบ:
ความจำเป็นในการเพิ่มช่วงของการเปลี่ยนมุมนั้นซับซ้อน ระบบควบคุมไทริสเตอร์… แผนภาพในรูป 1, d สามารถนำมาใช้ได้เมื่อขดลวดสเตเตอร์เชื่อมต่ออยู่ในรูปดาวโดยไม่มีตัวนำที่เป็นกลางและในเดลต้าที่มีวงจรเรียงกระแสรวมอยู่ในตัวนำเส้น ขอบเขตของโครงร่างนี้จำกัดเฉพาะไดรฟ์ไฟฟ้าแบบย้อนกลับไม่ได้และแบบย้อนกลับที่มีหน้าสัมผัสย้อนกลับ
แผนภาพในรูป 4-1, e ในคุณสมบัติของมันคล้ายกับโครงร่างในรูปที่ 1, ก. กระแสไตรแอกที่นี่เท่ากับกระแสโหลดและความถี่ของพัลส์ควบคุมเท่ากับสองเท่าของความถี่ของแรงดันไฟฟ้า ข้อเสียของวงจรไตรแอกนั้นเล็กกว่าไทริสเตอร์ทั่วไปมาก ค่าที่อนุญาต du / dt และ di / dt
สำหรับตัวควบคุม thyristor รูปแบบที่มีเหตุผลที่สุดคือรูปที่ 1 แต่มีไทริสเตอร์ที่เชื่อมต่อแบบขนานสองตัว
วงจรไฟฟ้าของหน่วยงานกำกับดูแลถูกนำไปใช้กับไทริสเตอร์ต่อต้านขนานในทั้งสามเฟส (วงจรสามเฟสสมมาตร) ในสองและหนึ่งเฟสของมอเตอร์ดังแสดงในรูป 1, f, g และ h ตามลำดับ
ในตัวควบคุมที่ใช้ในไดรฟ์ไฟฟ้าของเครน สิ่งที่แพร่หลายที่สุดคือวงจรสวิตชิ่งแบบสมมาตรที่แสดงในรูปที่ 1, e ซึ่งเป็นลักษณะของการสูญเสียต่ำสุดจากกระแสฮาร์มอนิกที่สูงขึ้น การสูญเสียที่มากขึ้นในวงจรที่มีไทริสเตอร์สี่และสองตัวนั้นพิจารณาจากความไม่สมดุลของแรงดันไฟฟ้าในเฟสของมอเตอร์
ข้อมูลทางเทคนิคพื้นฐานสำหรับตัวควบคุมไทริสเตอร์ซีรีส์ PCT
ตัวควบคุมไทริสเตอร์ของซีรีย์ PCT เป็นอุปกรณ์สำหรับเปลี่ยน (ตามกฎหมายที่กำหนด) แรงดันไฟฟ้าที่จ่ายให้กับสเตเตอร์ของมอเตอร์เหนี่ยวนำด้วยโรเตอร์แผล ตัวควบคุมไทริสเตอร์ของซีรีย์ PCT นั้นทำขึ้นตามวงจรสวิตชิ่งสามเฟสแบบสมมาตร (รูปที่ 1, e) การใช้ตัวควบคุมของซีรีส์ที่ระบุในไดรฟ์ไฟฟ้าของเครนช่วยให้สามารถควบคุมความถี่ในการหมุนในช่วง 10: 1 และควบคุมแรงบิดของเครื่องยนต์ในโหมดไดนามิกระหว่างการสตาร์ทและหยุด
ตัวควบคุมไทริสเตอร์ของซีรีส์ PCT ได้รับการออกแบบสำหรับกระแสต่อเนื่อง 100, 160 และ 320 A (กระแสสูงสุด 200, 320 และ 640 A ตามลำดับ) และแรงดันไฟฟ้า 220 และ 380 V AC ตัวควบคุมประกอบด้วยหน่วยจ่ายไฟสามหน่วยที่ประกอบอยู่ในเฟรมทั่วไป (ตามจำนวนเฟสของไทริสเตอร์ที่เชื่อมต่อแบบขนานกัน) หน่วยเซ็นเซอร์ปัจจุบันและหน่วยอัตโนมัติ พาวเวอร์ซัพพลายใช้ไทริสเตอร์แบบแท็บเล็ตพร้อมตัวระบายความร้อนโปรไฟล์อะลูมิเนียมอัดขึ้นรูป การระบายความร้อนด้วยอากาศ - เป็นธรรมชาติ บล็อกการทำงานอัตโนมัติจะเหมือนกันสำหรับเรกูเลเตอร์ทุกรุ่น
ไทริสเตอร์เรกูเลเตอร์ผลิตขึ้นโดยมีระดับการป้องกัน IP00 และมีไว้สำหรับติดตั้งบนเฟรมคอนโทรลเลอร์แม่เหล็กชนิด TTZ มาตรฐาน ซึ่งมีการออกแบบที่คล้ายคลึงกันกับคอนโทรลเลอร์ซีรีส์ TA และ TCA ขนาดและน้ำหนักโดยรวมของตัวควบคุมซีรีส์ PCT แสดงไว้ในตาราง 1.
ตารางที่ 1 ขนาดและน้ำหนักโดยรวมของตัวควบคุมแรงดันไฟฟ้ารุ่น PCT

ตัวควบคุมแม่เหล็ก TTZ ติดตั้งคอนแทคทิศทางสำหรับการย้อนกลับของมอเตอร์, คอนแทคของวงจรโรเตอร์และองค์ประกอบหน้าสัมผัสรีเลย์อื่น ๆ ของไดรฟ์ไฟฟ้าซึ่งสื่อสารตัวควบคุมกับตัวควบคุมไทริสเตอร์ โครงสร้างการก่อสร้างของระบบควบคุมเรกูเลเตอร์สามารถมองเห็นได้จากแผนภาพการทำงานของไดรฟ์ไฟฟ้าที่แสดงในรูปที่ 2.
ไทริสเตอร์บล็อก T แบบสมมาตรสามเฟสถูกควบคุมโดยระบบควบคุมเฟส SFU การใช้ตัวควบคุม KK ในตัวควบคุมการตั้งค่าความเร็วของ BZS จะเปลี่ยนไป ผ่านบล็อก BZS ในฟังก์ชั่นเวลาตัวควบคุมคันเร่ง KU2 ในวงจรโรเตอร์จะถูกควบคุม ความแตกต่างระหว่างสัญญาณอ้างอิงและเครื่องกำเนิดความเร็วรอบ TG ถูกขยายโดยเครื่องขยายสัญญาณ U1 และ UZ อุปกรณ์ลอจิกรีเลย์เชื่อมต่อกับเอาต์พุตของเครื่องขยายสัญญาณ UZ ซึ่งมีสถานะเสถียรสองสถานะ: สถานะหนึ่งสอดคล้องกับการเปิดสวิตช์ของคอนแทคทิศทางไปข้างหน้า KB ที่สอง - เพื่อเปิดคอนแทคไปข้างหน้าทิศทางย้อนกลับ KN
พร้อมกันกับการเปลี่ยนแปลงสถานะของอุปกรณ์ลอจิก สัญญาณในวงจรควบคุมของสวิตช์จะกลับด้าน สัญญาณจากแอมพลิฟายเออร์ที่ตรงกัน U2 จะถูกรวมเข้ากับสัญญาณตอบรับการหน่วงเวลาของสเตเตอร์ของมอเตอร์ที่มาจากบล็อกจำกัดกระแส TO และป้อนเข้ากับอินพุตของ SFU
ลอจิกบล็อก BL ยังได้รับผลกระทบจากสัญญาณจากเซ็นเซอร์ปัจจุบัน DT และโมดูลการแสดงตนปัจจุบัน NT ซึ่งห้ามการสลับคอนแทคเตอร์ทิศทางในขณะที่จ่ายพลังงาน หน่วย BL ยังดำเนินการแก้ไขแบบไม่เชิงเส้นของระบบรักษาเสถียรภาพความเร็วเพื่อให้มั่นใจในความเสถียรของไดรฟ์ ตัวควบคุมสามารถใช้ในไดรฟ์ไฟฟ้าของกลไกการยกและการเคลื่อนที่
เรกกูเลเตอร์ซีรีย์ PCT ถูกสร้างขึ้นด้วยระบบจำกัดกระแส ระดับของข้อ จำกัด ในปัจจุบันสำหรับการป้องกันไทริสเตอร์จากการโอเวอร์โหลดและสำหรับการ จำกัด แรงบิดของมอเตอร์ในโหมดไดนามิกนั้นแตกต่างกันไปอย่างราบรื่นตั้งแต่ 0.65 ถึง 1.5 ของกระแสที่กำหนดของเรกูเลเตอร์ ระดับของข้อ จำกัด ของกระแสสำหรับการป้องกันกระแสเกิน - จาก 0 ,9 ถึง กระแสไฟ 2.0 ของเรกูเลเตอร์ การตั้งค่าการป้องกันที่หลากหลายช่วยให้การทำงานของเรกูเลเตอร์ขนาดมาตรฐานเดียวกันกับมอเตอร์ที่มีกำลังต่างกันประมาณ 2 เท่า
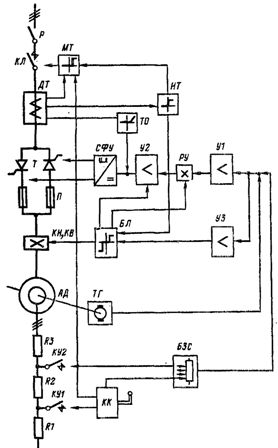
ข้าว. 2. แผนภาพการทำงานของไดรฟ์ไฟฟ้าพร้อมตัวควบคุมไทริสเตอร์ชนิด PCT: KK - ตัวควบคุมคำสั่ง; TG — เครื่องกำเนิดความเร็วรอบ; KN, KB — คอนแทคทิศทาง; BZS — บล็อกการตั้งค่าความเร็ว BL — ลอจิกบล็อก; ยูวัน ยูทู. สหรัฐอเมริกา — เครื่องขยายเสียง SFU — ระบบควบคุมเฟส DT — เซ็นเซอร์ปัจจุบัน IT — หน่วยการแสดงตนในปัจจุบัน K — หน่วยจำกัดกระแส; MT — หน่วยป้องกัน KU1, KU2 — คอนแทคเตอร์เร่งความเร็ว; KL — คอนแทคเชิงเส้น: R — เซอร์กิตเบรกเกอร์
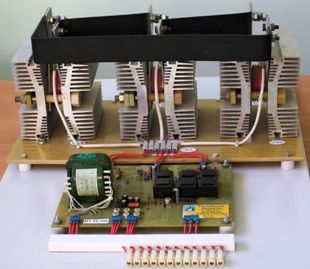
ข้าว. 3. ตัวควบคุมแรงดันไฟฟ้าไทริสเตอร์ PCT
ความไวของระบบการแสดงตนปัจจุบันคือ 5-10 A rms กระแสในเฟส ตัวควบคุมยังให้การป้องกัน: ศูนย์จากการสลับแรงดันไฟเกินจากการสูญเสียกระแสอย่างน้อยหนึ่งเฟส (บล็อก IT และ MT) จากการรบกวนในการรับสัญญาณวิทยุฟิวส์ความเร็วสูงชนิด PNB 5M ช่วยป้องกันกระแสลัดวงจร