โหลดคงที่ในเครื่องยนต์ของกลไกเครนหลัก
กำลังและแรงบิดของเพลามอเตอร์ของรอกเครนในโหมดคงที่ของการยกโหลดสามารถคำนวณได้จากสูตร
โดยที่ P คือกำลังของเพลามอเตอร์, กิโลวัตต์; G คือแรงที่ต้องใช้ในการยกของ, N; G0 — แรงยกของอุปกรณ์จับ, N; M คือโมเมนต์เพลามอเตอร์ Nm; v คือความเร็วในการยกของ, m / s; D คือเส้นผ่านศูนย์กลางของดรัมเครื่องกว้านลากจูง m; η — ประสิทธิภาพของกลไกการยก; i คืออัตราทดเกียร์ของกระปุกเกียร์และรอกโซ่
ในโหมดการลง เครื่องยนต์เครนพัฒนากำลังเท่ากับความแตกต่างระหว่างแรงเสียดทาน Ptr และกำลังเนื่องจากการกระทำของน้ำหนักของโหลดจากมากไปน้อย Pgr:
เมื่อลดระดับน้ำหนักปานกลางและน้ำหนักมาก พลังงานจะถูกส่งตรงจากเพลาเกียร์ไปยังมอเตอร์เนื่องจาก Pgr >> Ptr (การคลายเบรก) ในกรณีนี้ กำลังเพลามอเตอร์ kW จะแสดงตามสูตร

เมื่อลดโหลดเบาหรือตะขอเปล่า อาจมีบางกรณีที่ Pgr < Ptr.ในกรณีนี้ เครื่องยนต์ทำงานด้วยการเคลื่อนไหวชั่วขณะ (กำลังลง) และพัฒนากำลัง, กิโลวัตต์,

ตามสูตรที่กำหนด สามารถตรวจสอบกำลังของมอเตอร์เครนที่โหลดใดๆ บนขอเกี่ยว เมื่อทำการคำนวณควรจำไว้ว่าประสิทธิภาพของกลไกขึ้นอยู่กับโหลด (รูปที่ 1)
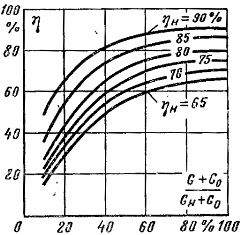
ข้าว. 1. การพึ่งพาประสิทธิภาพของกลไกในการโหลด
กำลังและแรงบิดบนเพลาของมอเตอร์ของกลไกแนวนอนของการเคลื่อนที่ของเครนในโหมดการทำงานแบบคงที่สามารถกำหนดได้จากสูตร

โดยที่ P คือกำลังเพลามอเตอร์ของกลไกการเคลื่อนที่ของเครน, กิโลวัตต์; M คือโมเมนต์เพลามอเตอร์ของกลไกการเคลื่อนที่ Nm; G — น้ำหนักของสินค้าที่ขนส่ง, N; G1 — น้ำหนักของกลไกการเคลื่อนไหวของตัวเอง, N; v - ความเร็วในการเคลื่อนที่ m / s; R คือรัศมีของล้อ m; r คือรัศมีของคอเพลาล้อ m; μ — ค่าสัมประสิทธิ์แรงเสียดทานแบบเลื่อน (μ = 0.08-0.12); f - ค่าสัมประสิทธิ์แรงเสียดทานการหมุน m (f = 0.0005 — 0.001 m); η — ประสิทธิภาพของกลไกการเคลื่อนไหว k - ค่าสัมประสิทธิ์การบัญชีสำหรับแรงเสียดทานของหน้าแปลนล้อบนราง ผม — อัตราทดเกียร์ของตัวทดรอบช่วงล่าง
ในกลไกการยกและการขนส่งจำนวนหนึ่ง การเคลื่อนไหวไม่ได้เกิดขึ้นในแนวราบ ผลกระทบของแรงลม ฯลฯ ก็เป็นไปได้เช่นกัน สูตรสำหรับการกำหนดพลังงานในกรณีนี้สามารถแสดงเป็น

เครื่องหมายเพิ่มเติม: α - มุมเอียงของไกด์ไปยังระนาบแนวนอน F - แรงลมเฉพาะ N / m2; S คือพื้นที่ที่แรงดันลมกระทำที่มุม 90 °, m2
ในสูตรสุดท้าย คำแรกแสดงลักษณะกำลังของเพลามอเตอร์ที่จำเป็นต่อการเอาชนะแรงเสียดทานระหว่างการเคลื่อนที่ในแนวราบ คำที่สองสอดคล้องกับแรงยก คำที่สามคือส่วนประกอบกำลังจากแรงลม
เครนจำนวนหนึ่งมีแท่นหมุนซึ่งเป็นที่ตั้งของอุปกรณ์การทำงาน การเคลื่อนที่ของแพลตฟอร์มจะถูกส่งผ่านล้อเฟือง (จานเสียง) ที่มีเส้นผ่านศูนย์กลาง Dkp ติดตั้งอยู่ ระหว่างแท่นและฐานคงที่มีลูกกลิ้ง (ลูกกลิ้ง) ที่มีเส้นผ่านศูนย์กลาง dp ในกรณีนี้ กำลังและแรงบิดของมอเตอร์เครนเนื่องจากแรงเสียดทานจะพบว่าคล้ายกับกรณีของการเคลื่อนที่แบบลูกสูบ กล่าวคือ:

นอกเหนือจากค่าที่ทราบแล้ว G2 คือน้ำหนักของแท่นหมุนพร้อมอุปกรณ์ทั้งหมด N; ωl — ความเร็วเชิงมุม, แท่น, rad/วินาที; ใน — อัตราทดเกียร์ของกลไกการแกว่งกระปุกเกียร์และเฟืองขับของเกียร์ — จานเสียง

เมื่อกำหนดกำลังของไดรฟ์ไฟฟ้าเครน ในบางกรณีจำเป็นต้องคำนึงถึงการเปลี่ยนแปลงของโหลดเมื่อทำงานบนทางลาด แรงลมบนกลไกการหมุนถูกกำหนดโดยคำนึงถึงความแตกต่างของแรงลมที่กระทำต่อน้ำหนักบรรทุก บูมเครน และน้ำหนักถ่วง
เมื่อออกแบบไดรฟ์ไฟฟ้าสำหรับกลไกเครน ในตอนท้ายของการเลือกมอเตอร์ ไดรฟ์ไฟฟ้าจะถูกตรวจสอบสำหรับค่าความเร่งที่อนุญาต ข้อมูลที่แสดงไว้ในตารางที่ 1
ตารางที่ 1 ชื่อของกลไกและวัตถุประสงค์
ชื่อของกลไกและวัตถุประสงค์ ความเร่ง, m / s2 กลไกการยกที่มีไว้สำหรับการยกโลหะเหลว, วัตถุที่เปราะบาง, ผลิตภัณฑ์, งานประกอบต่างๆ 0.1 กลไกการยกของสวนประกอบและการประชุมเชิงปฏิบัติการด้านโลหะวิทยา 0.2 — 0.5 กลไกการยกของเครนจับ 0.8 กลไกสำหรับ การเคลื่อนที่ของปั้นจั่นที่มีไว้สำหรับงานประกอบที่มีความแม่นยำและการขนส่งโลหะเหลว วัตถุเปราะบาง 0.1 - 0.2 กลไกการเคลื่อนที่ด้วยแรงดึงดูดของโลกอย่างเต็มที่ 0.2 - 0.7 การยึดเกาะเต็มคันรถเครน 0.8 — 1.4 การหมุนของเครน 0.5 — 1.2