การเลือกมอเตอร์ไฟฟ้าสำหรับอุปกรณ์ที่มีโหลดและโหมดการทำงานประเภทต่างๆ
 การเลือกมอเตอร์ไฟฟ้าที่ถูกต้องสำหรับกลไกการผลิตช่วยให้มั่นใจได้ถึงการทำงานที่ต่อเนื่องและเชื่อถือได้ตลอดอายุการใช้งานมาตรฐาน นี่เป็นกระบวนการที่สำคัญมากซึ่งต้องพิจารณาปัจจัยและเกณฑ์ต่างๆ มากมาย ปัจจัยที่สำคัญที่สุดประการหนึ่งคือการพิจารณาถึงลักษณะและประเภทของน้ำหนักบรรทุก
การเลือกมอเตอร์ไฟฟ้าที่ถูกต้องสำหรับกลไกการผลิตช่วยให้มั่นใจได้ถึงการทำงานที่ต่อเนื่องและเชื่อถือได้ตลอดอายุการใช้งานมาตรฐาน นี่เป็นกระบวนการที่สำคัญมากซึ่งต้องพิจารณาปัจจัยและเกณฑ์ต่างๆ มากมาย ปัจจัยที่สำคัญที่สุดประการหนึ่งคือการพิจารณาถึงลักษณะและประเภทของน้ำหนักบรรทุก
นี่คือเกณฑ์ทั้งหมดที่ควรพิจารณาเมื่อเลือก: วิธีการเลือกมอเตอร์ไฟฟ้าที่เหมาะสม
เมื่อเลือกมอเตอร์ไฟฟ้าสำหรับเครื่องจักรการติดตั้งและเครื่องจักรต่าง ๆ จำเป็นต้องคำนึงถึงโหลดประเภทต่าง ๆ ประเภทของลักษณะทางกลธรรมชาติและระยะเวลาของรอบการทำงานของกลไกเหล่านี้
เมื่อทราบว่าโหลดบนเพลาของมอเตอร์ไฟฟ้าที่เลือกจะเปลี่ยนแปลงอย่างไร จึงเป็นไปได้ที่จะระบุได้อย่างแม่นยำว่าการสูญเสียพลังงานจะเปลี่ยนแปลงอย่างไรระหว่างการทำงาน และด้วยเหตุนี้ ให้เลือกมอเตอร์ไฟฟ้าที่ทำงานที่โหลดที่กำหนด จะไม่ร้อนเกินไป . อุณหภูมิความร้อนสูงสุดของฉนวนของมอเตอร์ไฟฟ้าจะไม่เกินค่าที่อนุญาตในระหว่างรอบการทำงานทั้งหมด
การเลือกมอเตอร์ไฟฟ้าของกลไกการผลิตไม่ถูกต้องนำไปสู่การหยุดชะงักของกระบวนการผลิตและนำไปสู่การสูญเสียของผลิตภัณฑ์ที่ผลิตและค่าไฟฟ้าเพิ่มเติม
อุปกรณ์ไฟฟ้าพร้อมมอเตอร์ไฟฟ้าต้องเป็นไปตามข้อกำหนดของกระบวนการทางเทคโนโลยีอย่างครบถ้วน
การเลือกมอเตอร์ไฟฟ้าประเภทใดประเภทหนึ่งในแคตตาล็อกถือว่าถูกต้องหากตรงตามเงื่อนไขต่อไปนี้:
-
การโต้ตอบที่สมบูรณ์ที่สุดของมอเตอร์ไฟฟ้ากับเครื่องจักรทำงาน (กลไกขับเคลื่อน) ในแง่ของคุณสมบัติทางกล ซึ่งหมายความว่ามอเตอร์ไฟฟ้าต้องมีลักษณะทางกลที่สามารถให้ค่าความเร็วและความเร่งที่จำเป็นแก่ไดรฟ์ในสภาวะหยุดนิ่งและชั่วคราว
-
ใช้พลังงานมอเตอร์ไฟฟ้าสูงสุดในทุกโหมดการทำงาน อุณหภูมิของชิ้นส่วนที่ใช้งานทั้งหมดของมอเตอร์ไฟฟ้าในโหมดการทำงานที่รุนแรงที่สุดควรใกล้เคียงกับอุณหภูมิความร้อนที่อนุญาต แต่ไม่เกิน
-
ความเข้ากันได้ของมอเตอร์ไฟฟ้ากับไดรฟ์และสภาพแวดล้อมในแง่ของการออกแบบ
-
การปฏิบัติตามมอเตอร์ไฟฟ้ากับพารามิเตอร์ของแหล่งจ่ายไฟ
ในการเลือกมอเตอร์ไฟฟ้า จำเป็นต้องมีข้อมูลต่อไปนี้:
-
ประเภทและชื่อของกลไกขับเคลื่อน
-
กำลังเพลาสูงสุด หากโหมดการทำงานเป็นแบบต่อเนื่องและโหลดคงที่ และในกรณีอื่นๆ กราฟของการเปลี่ยนแปลงกำลังหรือโมเมนต์ความต้านทานของเพลาเป็นฟังก์ชันของเวลา
-
ความถี่ในการหมุน (หรือช่วงความถี่ในการหมุน) ของเพลาขับ
-
วิธีการประกบของกลไกขับเคลื่อนด้วยเพลาของมอเตอร์ไฟฟ้า (ในกรณีที่มีการส่งสัญญาณจลนศาสตร์จะมีการระบุประเภทของการส่งและอัตราทดเกียร์)
-
จำนวนแรงบิดเริ่มต้นที่มอเตอร์ไฟฟ้าต้องให้กับเพลาขับ
-
ขีด จำกัด ความเร็ว (ค่าบนและล่างและค่ากำลังและแรงบิดที่สอดคล้องกัน);
-
คุณภาพที่ต้องการ (ความเรียบ การไล่ระดับสี) ของการควบคุมความเร็ว
-
ความถี่ของการเปิดใช้งานไดรฟ์ภายในหนึ่งชั่วโมง
-
ลักษณะของสภาพแวดล้อมภายนอก
การเลือกมอเตอร์ไฟฟ้าโดยพิจารณาจากเงื่อนไขทั้งหมดและข้อมูลที่ระบุนั้นดำเนินการตามแคตตาล็อก

โหมดการทำงานที่เป็นไปได้ของไดรฟ์ไฟฟ้านั้นแตกต่างกันไปตามลักษณะและระยะเวลาของรอบ, ค่าโหลด, สภาพการทำความเย็น, อัตราส่วนของการสูญเสียเริ่มต้นและการทำงานที่ราบรื่น ฯลฯ ดังนั้นการผลิตมอเตอร์ไฟฟ้าสำหรับแต่ละ โหมดการทำงานที่เป็นไปได้ของไดรฟ์ไฟฟ้าไม่สมเหตุสมผล
จากการวิเคราะห์โหมดจริง มีการระบุคลาสของโหมดพิเศษ — โหมดระบุ ซึ่งออกแบบและผลิตเครื่องยนต์แบบอนุกรม
ข้อมูลที่อยู่ในหนังสือเดินทางของเครื่องไฟฟ้าอ้างอิงถึงโหมดที่ระบุและเรียกว่าข้อมูลระบุของเครื่องไฟฟ้า
ผู้ผลิตรับประกันว่าเมื่อมอเตอร์ไฟฟ้าทำงานในโหมดพิกัดที่โหลดพิกัด จะใช้ความร้อนอย่างเต็มที่
GOST ปัจจุบันมีโหมดระบุ 8 โหมดซึ่งตามการจัดประเภทระหว่างประเทศมีสัญลักษณ์ S1 — S8
หน้าที่ต่อเนื่อง S1 — การทำงานของเครื่องจักรที่โหลดคงที่เป็นเวลานานพอที่จะทำให้ชิ้นส่วนทั้งหมดมีอุณหภูมิคงที่
หน้าที่ระยะสั้น S2 — การทำงานของเครื่องจักรที่โหลดคงที่เป็นระยะเวลาที่ไม่เพียงพอสำหรับทุกส่วนของเครื่องจักรถึงอุณหภูมิที่ตั้งไว้ ตามด้วยการหยุดเครื่องจักรเป็นเวลาเพียงพอที่จะทำให้เครื่องเย็นลงที่อุณหภูมิไม่เกิน 2 ° C จากอุณหภูมิแวดล้อม สำหรับงานระยะสั้นระยะเวลาการทำงานคือ 15, 30, 60, 90 นาที
หน้าที่ที่ไม่ต่อเนื่อง S3 — ลำดับของรอบการทำงานที่เหมือนกัน ซึ่งแต่ละรอบรวมถึงเวลาของการทำงานของโหลดอย่างต่อเนื่องในระหว่างที่เครื่องไม่ร้อนจนถึงอุณหภูมิที่ตั้งไว้ และเวลาจอดรถในระหว่างที่เครื่องไม่เย็นลงจนถึงอุณหภูมิแวดล้อม
ในโหมดนี้ รอบการทำงานจะมีลักษณะที่กระแสไหลเข้าไม่ส่งผลต่ออุณหภูมิที่เพิ่มขึ้นอย่างมีนัยสำคัญ รอบเวลาไม่เพียงพอที่จะบรรลุสมดุลทางความร้อนและไม่เกิน 10 นาที โหมดนี้กำหนดโดยค่าของระยะเวลาการรวมเป็นเปอร์เซ็นต์:
มอเตอร์ที่ผลิตโดยอุตสาหกรรมสำหรับโหมดการทำงานนี้มีลักษณะเป็นรอบการทำงาน (PV) ซึ่งกำหนดโดยระยะเวลาของหนึ่งรอบการทำงาน
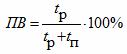
โดยที่ tp คือเวลาทำงานของเครื่องยนต์ tp - เวลาหยุดชั่วคราว
ค่ามาตรฐานของระยะเวลารวม: 15, 25, 40, 60% หรือค่าสัมพัทธ์ของระยะเวลาการทำงาน: 0.15; 0.25; 0.40; 0.60 สำหรับโหมด S3 ข้อมูลที่ได้รับการจัดอันดับจะสอดคล้องกับรอบการทำงานที่กำหนดเท่านั้น และอ้างอิงถึงรอบการทำงาน
โหมด S1 — S3 ปัจจุบันเป็นโหมดหลัก ซึ่งเป็นข้อมูลเล็กน้อยที่โรงงานผลิตรถยนต์ไฟฟ้าในท้องถิ่นรวมอยู่ในแคตตาล็อกและหนังสือเดินทางของเครื่อง
อ่านเพิ่มเติมเกี่ยวกับที่นี่: โหมดการทำงานของมอเตอร์ไฟฟ้า
สำหรับการเลือกมอเตอร์ที่เหมาะสมในแง่ของกำลัง จำเป็นต้องทราบว่าภาระของเพลามอเตอร์เปลี่ยนแปลงอย่างไรเมื่อเวลาผ่านไป ซึ่งจะทำให้สามารถประเมินลักษณะของการเปลี่ยนแปลงในการสูญเสียกำลังได้
นอกจากนี้ยังจำเป็นต้องกำหนดว่ากระบวนการให้ความร้อนของเครื่องยนต์ดำเนินไปอย่างไรอันเป็นผลมาจากการปลดปล่อยพลังงานที่สูญเสียไป วิธีนี้ช่วยให้คุณเลือกมอเตอร์ในลักษณะที่อุณหภูมิสูงสุดของฉนวนที่คดเคี้ยวไม่เกินค่าที่อนุญาต เงื่อนไขนี้เป็นหนึ่งในเงื่อนไขหลักสำหรับการทำงานที่เชื่อถือได้ของเครื่องยนต์ตลอดอายุการใช้งาน
การเลือกกำลังของมอเตอร์ไฟฟ้าจะต้องเป็นไปตามลักษณะของโหลดบนเครื่องทำงาน ตัวละครนี้ได้รับการประเมินจากสองปัจจัย:
-
ตามโหมดการทำงานที่กำหนด
-
โดยการเปลี่ยนแปลงปริมาณพลังงานที่ใช้ไป
กำลังเครื่องยนต์ต้องเป็นไปตามเงื่อนไขสามประการ:
-
ความร้อนปกติระหว่างการใช้งาน
-
ความจุเกินเพียงพอ
-
แรงบิดเริ่มต้นเพียงพอ
การเลือกใช้มอเตอร์ไฟฟ้าแบบที่เรียกว่า"พลังงานสำรอง" ตามโหลดที่ใหญ่ที่สุดตามกำหนดการ นำไปสู่การใช้มอเตอร์ไฟฟ้าน้อยเกินไป และส่งผลให้ต้นทุนทุนและต้นทุนการดำเนินงานเพิ่มขึ้นเนื่องจากปัจจัยด้านพลังงานและประสิทธิภาพลดลง กำลังเครื่องยนต์ที่เพิ่มขึ้นมากเกินไปอาจทำให้เกิดการกระตุกระหว่างการเร่งความเร็ว
หากมอเตอร์ไฟฟ้าต้องทำงานเป็นเวลานานโดยมีภาระคงที่หรือเปลี่ยนแปลงเล็กน้อย การกำหนดกำลังของมอเตอร์นั้นไม่ใช่เรื่องยากและดำเนินการตามสูตร การเลือกพลังของมอเตอร์ไฟฟ้าในโหมดการทำงานอื่นนั้นยากกว่ามาก

โหลดระยะสั้นนั้นมีลักษณะเฉพาะคือช่วงเวลาของการรวมนั้นสั้นและการหยุดพักนั้นเพียงพอสำหรับการระบายความร้อนของมอเตอร์ไฟฟ้าอย่างสมบูรณ์ ในกรณีนี้ สันนิษฐานว่าภาระของมอเตอร์ไฟฟ้าในช่วงระยะเวลาการสลับคงที่หรือเกือบคงที่
เพื่อให้มอเตอร์ไฟฟ้าใช้งานได้อย่างถูกต้องเพื่อให้ความร้อนในโหมดนี้ จำเป็นต้องเลือกเพื่อให้พลังงานต่อเนื่อง (ระบุไว้ในแคตตาล็อก) น้อยกว่าพลังงานที่สอดคล้องกับโหลดระยะสั้น เช่น มอเตอร์ไฟฟ้ามีความร้อนเกินในช่วงการทำงานระยะสั้น...
หากระยะเวลาการทำงานของมอเตอร์ไฟฟ้าน้อยกว่าเวลาที่จำเป็นสำหรับการทำความร้อนอย่างสมบูรณ์ แต่การหยุดชั่วคราวระหว่างช่วงเวลาของการเปิดเครื่องนั้นสั้นกว่าเวลาของการทำความเย็นที่สมบูรณ์อย่างมีนัยสำคัญ แสดงว่ามีการโหลดซ้ำในระยะสั้น
การคำนวณกำลังและการเลือกมอเตอร์สำหรับการทำงานต่อเนื่อง
ด้วยโหลดของเพลาที่คงที่หรือเปลี่ยนแปลงเล็กน้อย กำลังของมอเตอร์ควรจะเกินกำลังของโหลดเพียงเล็กน้อยเท่านั้นกรณีนี้ต้องเข้าเงื่อนไข
Pn ≥ P,
โดยที่ Pn คือกำลังเครื่องยนต์ที่กำหนด P - กำลังโหลด การเลือกเครื่องยนต์ขึ้นอยู่กับการเลือกจากแคตตาล็อก
การเลือกกำลังเครื่องยนต์สำหรับการทำงานต่อเนื่อง หากแรงบิดและกำลังของกลไกการผลิตไม่เปลี่ยนแปลง ควรเลือกมอเตอร์ที่มีกำลังเล็กน้อย Pn เท่ากับกำลังของโหลด โดยคำนึงถึงการสูญเสียในการส่ง (กระปุกเกียร์):
Pn ≥ Pm /ηt, W
โดยที่ ηt คือประสิทธิภาพของระบบส่งกำลัง (กระปุกเกียร์)
ในช่วงเวลาที่กำหนดของแรงต้านของกลไกขับเคลื่อน Ms, N ∙ m และความถี่ของการหมุนของเพลาส่งออกของกระปุกเกียร์ n2, รอบต่อนาที
Pm = Mc ∙ ω2, W
โดยที่ ω2 = 2π ∙ n2 / 60, rad / s
สำหรับกลไกการผลิตบางอย่างที่ทำงานในโหมดต่อเนื่องโดยมีโมเมนต์ต้านทานเพลาคงที่ มีสูตรโดยประมาณสำหรับกำหนดกำลังของมอเตอร์
การคำนวณกำลังและการเลือกมอเตอร์สำหรับโหลดระยะสั้น
มอเตอร์สำหรับการทำงานระยะสั้นของไดรฟ์ไฟฟ้าถูกเลือกตามกำลังไฟซึ่งจะต้องเท่ากับกำลังโหลดโดยคำนึงถึงระยะเวลาของการทำงาน ค่ามาตรฐานที่อนุญาตสำหรับเครื่องยนต์ที่ผลิตโดยอุตสาหกรรมสำหรับการทำงานระยะสั้นคือ 10, 30, 60, 90 นาที
ในกรณีที่ไม่มีมอเตอร์ทำงานไม่ต่อเนื่อง สามารถติดตั้งมอเตอร์ทำงานไม่ต่อเนื่องได้ ในกรณีนี้ เวลาทำงาน 30 นาทีตรงกับรอบการทำงาน = 15%, 60 นาทีตรงกับรอบการทำงาน = 25% และ 90 นาทีตรงกับรอบการทำงาน = 40%เป็นทางเลือกสุดท้าย เป็นไปได้ที่จะใช้มอเตอร์สำหรับการทำงานต่อเนื่องกับ Pn < P และการตรวจสอบสภาวะความร้อนในภายหลัง
การคำนวณกำลังและการเลือกมอเตอร์สำหรับโหลดไม่ต่อเนื่อง
สำหรับไดรฟ์ไฟฟ้าที่ทำงานในโหมดไม่ต่อเนื่อง กำลังของมอเตอร์จะคำนวณโดยใช้วิธีการสูญเสียเฉลี่ยหรือค่าที่เทียบเท่า วิธีแรกนั้นแม่นยำกว่า แต่ใช้แรงงานมากกว่า สะดวกกว่าที่จะใช้วิธีการของค่าเทียบเท่า P = f (t), M = f (t), I = f (t) ขึ้นอยู่กับตารางการโหลดที่กำหนดซึ่งได้แก่ เรียกว่าเทียบเท่า
กำลังเทียบเท่าคือกำลัง RMS ของไดอะแกรมโหลด
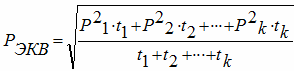
โดยที่ t1, t2, …, tk — ช่วงเวลาที่กำลังโหลดเท่ากับ P1, P2, …, Pk ตามลำดับ
ตามแคตตาล็อก สำหรับค่าที่ได้รับของ Reqv และ PV กำลังไฟของมอเตอร์จะถูกเลือกจากเงื่อนไข Pn ≥ REKV
หากกำหนดแผนภาพ M = f (t) โมเมนต์สมมูล
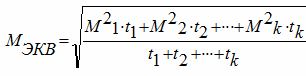
และกำลังที่เท่ากันที่ความเร็ว n ถูกกำหนดโดยนิพจน์
ความต้องการ = Meq • n / 9550 (kW)
หากกำหนดแผนภาพ I = f (t) กระแสของสมมูลความร้อน
ค่า PVr ที่คำนวณได้มักจะแตกต่างจากค่ามาตรฐาน ดังนั้นค่า PVr ที่ได้รับจึงถูกปัดเศษเป็นค่ามาตรฐานที่ใกล้ที่สุด หรือกำลังที่เทียบเท่าจะถูกคำนวณใหม่โดยใช้สูตร
ในระหว่างการใช้งานจะสังเกตเห็นการโอเวอร์โหลดในระยะสั้นซึ่งเกินกำลังมอเตอร์เล็กน้อย ไม่ส่งผลต่อความร้อนของเครื่องยนต์อย่างมีนัยสำคัญ แต่อาจนำไปสู่การทำงานที่ไม่ถูกต้องหรือการหยุดทำงาน ดังนั้นควรตรวจสอบความจุเกินของมอเตอร์ตามนิพจน์
Pm / Pn = ku ∙ มม. / มม.
โดยที่ Pm คือพลังงานสูงสุดในไดอะแกรมโหลด Mm / Mn — ทวีคูณของแรงบิดสูงสุดถูกกำหนดโดยแค็ตตาล็อก ค่าสัมประสิทธิ์ ku = 0.8 คำนึงถึงแรงดันไฟฟ้าตกที่อาจเกิดขึ้นในเครือข่าย
หากไม่ตรงตามเงื่อนไขนี้ จะต้องเลือกมอเตอร์ที่มีกำลังสูงกว่าจากแคตตาล็อกและตรวจสอบความจุเกินอีกครั้ง
ดูเพิ่มเติมในหัวข้อนี้: การเลือกเครื่องยนต์สำหรับการทำงานเป็นระยะ

อุตสาหกรรมนี้ผลิตมอเตอร์โหลดแบบไม่ต่อเนื่องหลายชุด:
-
เครนแบบอะซิงโครนัสพร้อมโรเตอร์กระรอกในซีรีส์ MTKF และเฟสโรเตอร์ในซีรีส์ MTF
-
ชุดโลหะที่คล้ายกัน MTKN และ MTN;
-
DC ซีรีส์ D
เครื่องจักรของซีรีส์ที่ระบุนั้นมีรูปร่างของโรเตอร์ยาว (สมอ) ซึ่งช่วยลดโมเมนต์ความเฉื่อย เพื่อลดการสูญเสียที่ปล่อยออกมาในขดลวดของสเตเตอร์ในระหว่างเกิดสภาวะชั่วขณะ มอเตอร์ของซีรีส์ MTKF และ MTKN จะมีค่าสนอร์มเล็กน้อยเพิ่มขึ้น = 7 ÷ 12% ความจุเกินของมอเตอร์ของเครนและชุดโลหะคือ 2.3 — 3 ที่รอบการทำงาน = 40% ซึ่งที่รอบการทำงาน = 100% สอดคล้องกับ λ = Mcr / Mnom100 = 4.4-5.5