ระบบเครื่องกำเนิดไฟฟ้า — มอเตอร์กระแสตรง
 เครื่องมือกลต่างๆ มักจะต้องการการควบคุมความเร็วของไดรฟ์แบบไร้ขั้นตอนในช่วงที่กว้างกว่าที่สามารถทำได้โดยการปรับฟลักซ์แม่เหล็ก มอเตอร์กระแสตรงพร้อมการกระตุ้นแบบขนาน… ในกรณีเหล่านี้ จะมีการใช้ระบบขับเคลื่อนไฟฟ้าที่ซับซ้อนมากขึ้น
เครื่องมือกลต่างๆ มักจะต้องการการควบคุมความเร็วของไดรฟ์แบบไร้ขั้นตอนในช่วงที่กว้างกว่าที่สามารถทำได้โดยการปรับฟลักซ์แม่เหล็ก มอเตอร์กระแสตรงพร้อมการกระตุ้นแบบขนาน… ในกรณีเหล่านี้ จะมีการใช้ระบบขับเคลื่อนไฟฟ้าที่ซับซ้อนมากขึ้น
ในรูป 1 แสดงไดอะแกรมของไดรฟ์ไฟฟ้าแบบปรับได้ตามระบบเจนเนอเรเตอร์-มอเตอร์ (ตัวย่อ G — D) ในระบบนี้ IM มอเตอร์เหนี่ยวนำจะหมุนเครื่องกำเนิดไฟฟ้ากระแสตรงแบบตื่นเต้นอิสระ G และเครื่องกระตุ้น B อย่างต่อเนื่อง ซึ่งเป็นเครื่องกำเนิดไฟฟ้ากระแสตรงกำลังต่ำแบบกระตุ้นขนาน
มอเตอร์กระแสตรง D ขับเคลื่อนส่วนการทำงานของเครื่อง ขดลวดกระตุ้นของเครื่องกำเนิดไฟฟ้า OVG และมอเตอร์ ATS ได้รับการจัดหาโดยเครื่องกระตุ้น B โดยการเปลี่ยนความต้านทานของวงจรกระตุ้นของเครื่องกำเนิดไฟฟ้า G โดยรีโอสแตท 1 แรงดันไฟฟ้าที่ใช้กับกระดองของมอเตอร์ D จะเปลี่ยนไป และทำให้ ความเร็วของมอเตอร์ถูกควบคุม ในกรณีนี้ มอเตอร์จะทำงานเต็มที่และฟลักซ์คงที่เนื่องจากรีโอสแตต 2 ถูกถอดออก
เมื่อแรงดันไฟฟ้า U เปลี่ยนแปลง ความเร็วจะเปลี่ยน n0 ความเร็วรอบเดินเบาของมอเตอร์ในอุดมคติ D เนื่องจากฟลักซ์ของมอเตอร์และความต้านทานของวงจรกระดองไม่เปลี่ยนแปลง ความชัน b จึงคงที่ ดังนั้นลักษณะทางกลเชิงเส้นตรงซึ่งสอดคล้องกับค่าต่าง ๆ ของ U จึงอยู่ต่ำกว่าค่าอื่นและขนานกัน (รูปที่ 2)
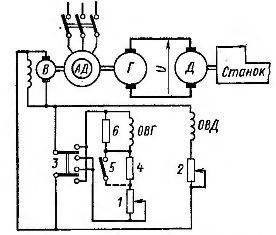
ข้าว. 1. เครื่องกำเนิดระบบ - มอเตอร์กระแสตรง (dpt)
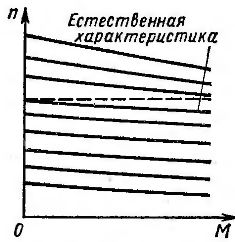
ข้าว. 2. ลักษณะทางกลของเครื่องกำเนิดไฟฟ้า — ระบบมอเตอร์ไฟฟ้ากระแสตรง
มีความชันมากกว่าลักษณะของมอเตอร์ไฟฟ้าตัวเดียวกันที่ป้อนจากเครือข่ายคงที่เนื่องจากในระบบ G - D แรงดันไฟฟ้า U ที่กระแสกระตุ้นคงที่ของเครื่องกำเนิดไฟฟ้าจะลดลงเมื่อโหลดเพิ่มขึ้นตามการพึ่งพา:
ที่ไหน เช่น และ rg — e ตามลำดับ เป็นต้น หน้าและความต้านทานภายในของเครื่องกำเนิดไฟฟ้า
โดยเปรียบเทียบกับมอเตอร์แบบอะซิงโครนัส เราแสดงว่า
ค่านี้แสดงลักษณะความเร็วรอบเครื่องยนต์ที่ลดลงเมื่อโหลดเพิ่มขึ้นจากศูนย์เป็นค่าเล็กน้อย สำหรับคุณสมบัติเชิงกลแบบขนาน
ค่านี้เพิ่มขึ้นเมื่อ n0 ลดลง ที่ค่า sn มาก เงื่อนไขการตัดที่ระบุจะเปลี่ยนไปอย่างมากพร้อมกับความผันผวนของโหลดแบบสุ่ม ดังนั้นช่วงการควบคุมแรงดันไฟฟ้าจึงมักจะน้อยกว่า 5:1
เมื่อกำลังพิกัดของมอเตอร์ลดลง แรงดันตกคร่อมมอเตอร์จะเพิ่มขึ้น และลักษณะทางกลจะชันขึ้น ด้วยเหตุนี้ ช่วงการควบคุมแรงดันไฟฟ้าของระบบ G -D จึงลดลงตามกำลังไฟฟ้าที่ลดลง (สำหรับกำลังไฟฟ้าที่น้อยกว่า 1 กิโลวัตต์เป็น 3:1 หรือ 2:1)
เมื่อฟลักซ์แม่เหล็กของเครื่องกำเนิดไฟฟ้าลดลง ผลของการล้างอำนาจแม่เหล็กของปฏิกิริยากระดองจะส่งผลต่อแรงดันไฟฟ้าในระดับที่มากขึ้น ดังนั้นคุณลักษณะที่เกี่ยวข้องกับความเร็วรอบเครื่องยนต์ต่ำจึงมีความชันมากกว่าลักษณะทางกล
การขยายช่วงการควบคุมทำได้โดยการลดฟลักซ์แม่เหล็กของมอเตอร์ D โดยใช้รีโอสแตท 2 (ดูรูปที่ 1) ซึ่งผลิตขึ้นเมื่อเครื่องกำเนิดไฟฟ้าไหลเต็มที่ วิธีการควบคุมความเร็วนี้สอดคล้องกับลักษณะที่อยู่เหนือธรรมชาติ หนึ่งอัน (ดูรูปที่ 2)
ช่วงการควบคุมทั้งหมดเท่ากับผลคูณของช่วงการควบคุมของทั้งสองวิธีถึง (10 — 15): 1. การควบคุมแรงดันไฟฟ้าคือการควบคุมแรงบิดคงที่ (เนื่องจากฟลักซ์แม่เหล็กของมอเตอร์ยังคงไม่เปลี่ยนแปลง) การควบคุมโดยการเปลี่ยนฟลักซ์แม่เหล็กของมอเตอร์ D เป็นการควบคุมพลังงานคงที่
ก่อนสตาร์ทมอเตอร์ D รีโอสแตท 2 (ดูรูปที่ 1) จะถูกลบออกจนหมด และฟลักซ์ของมอเตอร์ถึงค่าสูงสุด จากนั้นรีโอสแตท 1 จะเพิ่มแรงกระตุ้นของเครื่องกำเนิดไฟฟ้า G ซึ่งจะทำให้แรงดันไฟฟ้าเพิ่มขึ้นและความเร็วของมอเตอร์ D จะเพิ่มขึ้น หากขดลวด OVG เชื่อมต่อทันทีกับแรงดันไฟฟ้าเต็ม UB ของ exciter B กระแสในนั้นเช่นเดียวกับในวงจรใด ๆ ที่มีการเหนี่ยวนำและความต้านทานแบบแอคทีฟจะเพิ่มขึ้น:
โดยที่ rv คือความต้านทานของขดลวดกระตุ้น LB คือค่าความเหนี่ยวนำ (ละเว้นผลกระทบของความอิ่มตัวของวงจรแม่เหล็ก)
ในรูป 3, a (เส้นโค้ง 1) แสดงกราฟของการพึ่งพากระแสกระตุ้นตรงเวลา กระแสกระตุ้นเพิ่มขึ้นทีละน้อย อัตราการเพิ่มถูกกำหนดโดยอัตราส่วน

โดยที่ Tv คือค่าคงที่เวลาแม่เหล็กไฟฟ้าของเครื่องกำเนิดไฟฟ้าที่คดเคี้ยว มันมีมิติของเวลา
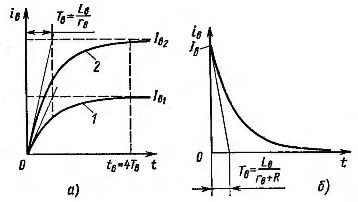
ข้าว. 3. การเปลี่ยนกระแสกระตุ้นในระบบ G-D
การเปลี่ยนแปลงของแรงดันไฟฟ้าของเครื่องกำเนิดไฟฟ้าเมื่อเริ่มต้นใช้งานมีลักษณะใกล้เคียงกับการเปลี่ยนแปลงของกระแสกระตุ้น ซึ่งช่วยให้มอเตอร์สตาร์ทโดยอัตโนมัติเมื่อถอดรีโอสแตท 1 ออก (ดูรูปที่ 1)
การเพิ่มขึ้นของกระแสกระตุ้นของเครื่องกำเนิดไฟฟ้ามักถูกเร่ง (บังคับ) โดยใช้แรงดันไฟฟ้าที่เกินค่าที่กำหนด ณ จุดเริ่มต้น จากนั้นกระบวนการเพิ่มการกระตุ้นจะดำเนินต่อไปตามเส้นโค้ง 2 (ดูรูปที่ 3, a ). เมื่อกระแสในขดลวดถึง Iv1 เท่ากับกระแสกระตุ้นในสถานะคงที่ที่แรงดันไฟฟ้าที่กำหนด แรงดันไฟฟ้าของขดลวดกระตุ้นจะลดลงเป็นค่าเล็กน้อย เวลาที่เพิ่มขึ้นของกระแสกระตุ้นถึงค่าเล็กน้อยจะลดลง
เพื่อบังคับการกระตุ้นของเครื่องกำเนิดไฟฟ้า แรงดันกระตุ้น V (ดูรูปที่ 1) จะถูกเลือกให้สูงกว่าแรงดันเล็กน้อยของขดลวดกระตุ้นเครื่องกำเนิดไฟฟ้า 2-3 เท่า และตัวต้านทานเพิ่มเติม 4 จะถูกนำเข้าสู่วงจร …
ระบบเจนเนอเรเตอร์-มอเตอร์ช่วยให้เกิดการเบรกแบบใหม่ หากต้องการหยุด กระแสในกระดองจำเป็นต้องเปลี่ยนทิศทาง แรงบิดจะเปลี่ยนเครื่องหมายและแทนที่จะขับจะกลายเป็นเบรก การหยุดเกิดขึ้นเมื่อฟลักซ์แม่เหล็กของมอเตอร์รีโอสแตต 2 เพิ่มขึ้นหรือเมื่อแรงดันเจเนอเรเตอร์ลดลงด้วยรีโอสแตต 1 ในทั้งสองกรณี เช่น เป็นต้น c. E ของมอเตอร์จะสูงกว่าแรงดัน U ของเครื่องกำเนิดไฟฟ้าในกรณีนี้ มอเตอร์ D ทำงานในโหมดเจเนอเรเตอร์และถูกขับเคลื่อนให้หมุนโดยพลังงานจลน์ของมวลที่เคลื่อนที่ และเจนเนอเรเตอร์ G ทำงานในโหมดมอเตอร์ หมุนเครื่อง IM ด้วยความเร็วซูเปอร์ซิงโครนัส ซึ่งในขณะเดียวกันก็สลับไปที่โหมดเจนเนอเรเตอร์และ จ่ายพลังงานให้กับเครือข่าย
การเบรกแบบสร้างพลังงานใหม่สามารถทำได้โดยไม่ส่งผลกระทบต่อรีโอสแตท 1 และ 2 คุณสามารถเปิดวงจรกระตุ้นเจนเนอเรเตอร์ (เช่น สวิตช์ 3) ในกรณีนี้กระแสในวงจรปิดประกอบด้วยขดลวดกระตุ้นของเครื่องกำเนิดไฟฟ้าและตัวต้านทาน 6 จะค่อยๆลดลง
โดยที่ R คือความต้านทานของตัวต้านทาน 6
กราฟที่สอดคล้องกับสมการนี้แสดงในรูปที่ 3, ข. กระแสกระตุ้นของเครื่องกำเนิดไฟฟ้าที่ลดลงทีละน้อยในกรณีนี้เทียบเท่ากับการเพิ่มขึ้นของความต้านทานของรีโอสแตท 1 (ดูรูปที่ 1) และทำให้เกิดการเบรกแบบใหม่ ในวงจรนี้ตัวต้านทาน 6 ที่ต่อขนานกับขดลวดกระตุ้นของเครื่องกำเนิดไฟฟ้าคือตัวต้านทานการปลดปล่อย ช่วยปกป้องฉนวนขดลวดกระตุ้นจากความเสียหายในกรณีที่วงจรกระตุ้นหยุดชะงักกะทันหัน
เมื่อวงจรกระตุ้นถูกขัดจังหวะ ฟลักซ์แม่เหล็กของเครื่องจะลดลงอย่างรวดเร็ว ทำให้เกิด e ในการหมุนของขดลวดกระตุ้น เป็นต้น ค. ความเหนี่ยวนำในตัวเองสูงมากจนทำให้ฉนวนที่คดเคี้ยวพังได้ ตัวต้านทานดิสชาร์จ 6 สร้างวงจรซึ่ง e. เป็นต้น ค. การเหนี่ยวนำตัวเองของขดลวดสนามทำให้เกิดกระแสที่ชะลอการลดลงของฟลักซ์แม่เหล็ก
แรงดันตกคร่อมตัวต้านทานดิสชาร์จจะเท่ากับแรงดันคร่อมฟิลด์คอยล์ยิ่งค่าความต้านทานการคายประจุต่ำลงเท่าใด แรงดันไฟฟ้าของขดลวดกระตุ้นก็จะยิ่งต่ำลงเมื่อวงจรขาด ในเวลาเดียวกันเมื่อค่าความต้านทานของตัวต้านทานการปลดปล่อยลดลงกระแสจะไหลผ่านในโหมดปกติอย่างต่อเนื่องและการสูญเสียจะเพิ่มขึ้น ต้องพิจารณาข้อกำหนดทั้งสองเมื่อเลือกค่าความต้านทานการคายประจุ
หลังจากปิดขดลวดกระตุ้นของเครื่องกำเนิดไฟฟ้าแล้ว แรงดันไฟฟ้าขนาดเล็กยังคงอยู่ที่ขั้วเนื่องจากแม่เหล็กตกค้าง ซึ่งอาจทำให้มอเตอร์หมุนช้าลงในระดับที่เรียกว่าความเร็วครีป เพื่อกำจัดปรากฏการณ์นี้ ขดลวดกระตุ้นของเครื่องกำเนิดไฟฟ้า หลังจากตัดการเชื่อมต่อจากเครื่องกระตุ้นแล้ว จะเชื่อมต่อกับขั้วของเครื่องกำเนิดไฟฟ้า เพื่อให้แรงดันไฟฟ้าจากแม่เหล็กตกค้างทำให้เกิดกระแสล้างอำนาจแม่เหล็กในขดลวดกระตุ้นของเครื่องกำเนิดไฟฟ้า
ในการย้อนกลับมอเตอร์ไฟฟ้า D ทิศทางของกระแสในขดลวดกระตุ้นของเครื่องกำเนิด OVG G จะเปลี่ยนโดยใช้สวิตช์ 3 (หรืออุปกรณ์อื่นที่คล้ายคลึงกัน) เนื่องจากความเหนี่ยวนำของขดลวดมีนัยสำคัญ กระแสกระตุ้นจะค่อยๆ ลดลง เปลี่ยนทิศทางแล้วค่อยๆ เพิ่มขึ้น
กระบวนการสตาร์ท การหยุด และการย้อนกลับของมอเตอร์ในระบบที่พิจารณานั้นประหยัดมาก เนื่องจากดำเนินการโดยไม่ต้องใช้รีโอสแตทที่รวมอยู่ในกระดอง มอเตอร์สตาร์ทและผ่อนความเร็วโดยใช้อุปกรณ์น้ำหนักเบาและกะทัดรัดที่ควบคุมกระแสสนามขนาดเล็กเท่านั้น ดังนั้นจึงแนะนำให้ใช้ระบบ "เครื่องกำเนิดไฟฟ้า-มอเตอร์ไฟฟ้ากระแสตรง" นี้กับงานที่มีการสตาร์ท เบรก และถอยหลังบ่อยครั้ง
ข้อเสียเปรียบหลักของระบบมอเตอร์-เจนเนอเรเตอร์-ดีซีคือประสิทธิภาพค่อนข้างต่ำ ต้นทุนสูง และมีความยุ่งยากเนื่องจากมีเครื่องจักรไฟฟ้าจำนวนมากในระบบ ราคาของระบบสูงกว่าราคาของมอเตอร์กรงกระรอกแบบอะซิงโครนัสที่มีกำลังเท่ากัน 8 - 10 เท่า ยิ่งไปกว่านั้น ระบบขับเคลื่อนไฟฟ้า ต้องการพื้นที่มาก