ไดรฟ์ไฟฟ้าไทริสเตอร์
 ในอุตสาหกรรม มีการใช้แอคชูเอเตอร์ที่มีวาล์วเซมิคอนดักเตอร์ควบคุม - ไทริสเตอร์ - กันอย่างแพร่หลาย ไทริสเตอร์ผลิตขึ้นสำหรับกระแสสูงถึงหลายร้อยแอมแปร์ สำหรับแรงดันไฟฟ้าสูงถึง 1,000 โวลต์ขึ้นไป โดดเด่นด้วยประสิทธิภาพสูง ขนาดค่อนข้างเล็ก ความเร็วสูง และความสามารถในการทำงานในอุณหภูมิแวดล้อมที่หลากหลาย (ตั้งแต่ -60 ถึง +60 ° C)
ในอุตสาหกรรม มีการใช้แอคชูเอเตอร์ที่มีวาล์วเซมิคอนดักเตอร์ควบคุม - ไทริสเตอร์ - กันอย่างแพร่หลาย ไทริสเตอร์ผลิตขึ้นสำหรับกระแสสูงถึงหลายร้อยแอมแปร์ สำหรับแรงดันไฟฟ้าสูงถึง 1,000 โวลต์ขึ้นไป โดดเด่นด้วยประสิทธิภาพสูง ขนาดค่อนข้างเล็ก ความเร็วสูง และความสามารถในการทำงานในอุณหภูมิแวดล้อมที่หลากหลาย (ตั้งแต่ -60 ถึง +60 ° C)
ไทริสเตอร์ไม่ใช่อุปกรณ์ที่ควบคุมได้อย่างสมบูรณ์ ซึ่งเปิดโดยการใช้ศักย์ไฟฟ้าที่สอดคล้องกันกับอิเล็กโทรดควบคุม และจะปิดโดยการบังคับวงจรไฟฟ้าขัดจังหวะเนื่องจากแรงดันขัดจังหวะ การเปลี่ยนผ่านตามธรรมชาติผ่านศูนย์หรือการจ่ายแดมปิ้ง แรงดันไฟฟ้าของเครื่องหมายตรงข้าม ด้วยการเปลี่ยนเวลาของการจ่ายแรงดันควบคุม (การหน่วงเวลา) คุณสามารถปรับค่าเฉลี่ยของแรงดันที่แก้ไขและทำให้ความเร็วของมอเตอร์
ค่าเฉลี่ยของแรงดันไฟฟ้าที่แก้ไขในกรณีที่ไม่มีการควบคุมนั้นส่วนใหญ่จะถูกกำหนดโดยวงจรสวิตชิ่งของตัวแปลงไทริสเตอร์ วงจรทรานสดิวเซอร์แบ่งออกเป็นสองประเภท: Zero-pull และ Bridged
ในการติดตั้งพลังงานปานกลางและสูง ส่วนใหญ่จะใช้วงจรบริดจ์คอนเวอร์เตอร์ ซึ่งส่วนใหญ่มาจากสองเหตุผล:
-
แรงดันไฟฟ้าน้อยลงในแต่ละไทริสเตอร์
-
ไม่มีส่วนประกอบกระแสคงที่ไหลผ่านขดลวดหม้อแปลง
วงจรคอนเวอร์เตอร์ยังสามารถแตกต่างกันในจำนวนเฟส: จากหนึ่งในการติดตั้งที่ใช้พลังงานต่ำถึง 12 — 24 ในคอนเวอร์เตอร์ที่ทรงพลัง
ไทริสเตอร์คอนเวอร์เตอร์ทุกรุ่นที่มีคุณสมบัติเป็นบวก เช่น ความเฉื่อยต่ำ ไม่มีองค์ประกอบหมุน ขนาดที่เล็กกว่า (เมื่อเทียบกับคอนเวอร์เตอร์ไฟฟ้า) มีข้อเสียหลายประการ:
1. การเชื่อมต่อกับเครือข่ายอย่างหนัก: ความผันผวนของแรงดันไฟฟ้าทั้งหมดในเครือข่ายจะถูกส่งโดยตรงไปยังระบบขับเคลื่อนและภาระที่เพิ่มขึ้น แกนมอเตอร์จะถูกถ่ายโอนไปยังเครือข่ายทันทีและทำให้เกิดกระแสไฟช็อต
2. ตัวประกอบกำลังไฟฟ้าต่ำเมื่อปรับแรงดันไฟฟ้าลง
3. การสร้างฮาร์มอนิกที่สูงขึ้น โหลดบนกริดไฟฟ้า
ลักษณะทางกลของมอเตอร์ที่ขับเคลื่อนด้วยไทริสเตอร์คอนเวอร์เตอร์ถูกกำหนดโดยแรงดันไฟฟ้าที่ใช้กับกระดองและลักษณะของการเปลี่ยนแปลงกับโหลด นั่นคือ ลักษณะภายนอกของตัวแปลงและพารามิเตอร์ของตัวแปลงและมอเตอร์
อุปกรณ์และหลักการทำงานของไทริสเตอร์
ไทริสเตอร์ (รูปที่ 1, a) เป็นสารกึ่งตัวนำซิลิกอนสี่ชั้นที่มีทางแยก pn สองทางและทางแยก n-p หนึ่งทาง ขนาดของกระแส Az ผ่านไทริสเตอร์ภายใต้การกระทำของแรงดันแอโนด Ua ขึ้นอยู่กับกระแส Az ระหว่างการควบคุมผ่านอิเล็กโทรดควบคุมภายใต้การกระทำของแรงดันควบคุม Uy
หากไม่มีกระแสควบคุม (Azy = 0) เมื่อแรงดันไฟฟ้า U เพิ่มขึ้น กระแส A ในวงจรของผู้ใช้ P จะเพิ่มขึ้น แต่จะมีค่าน้อยมาก (รูปที่ 1, b)

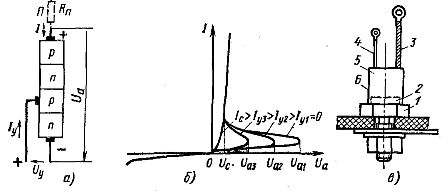
ข้าว. 1. บล็อกไดอะแกรม (a) ลักษณะแรงดันกระแส (b) และโครงสร้าง (c) ของไทริสเตอร์
ขณะนี้ ทางแยก n-p ที่เปิดในทิศทางที่ไม่นำไฟฟ้ามีความต้านทานสูง ที่ค่าหนึ่ง Ua1 ของแรงดันแอโนดเรียกว่าการเปิด การจุดระเบิด หรือแรงดันสวิตชิ่ง การพังทลายของชั้นปิดกั้นเกิดขึ้น ความต้านทานของมันจะเล็กลงและความแรงของกระแสจะเพิ่มขึ้นเป็นค่าที่กำหนดตามกฎของโอห์มโดยความต้านทาน Rp ของผู้ใช้พี
เมื่อกระแส Iу เพิ่มขึ้น แรงดัน Ua จะลดลง Iu ปัจจุบันซึ่งแรงดันไฟฟ้า Ua ถึงค่าต่ำสุดเรียกว่ากระแส I พร้อมการแก้ไข
ไทริสเตอร์จะปิดเมื่อแรงดันไฟฟ้า Ua ถูกลบออกหรือเมื่อเครื่องหมายเปลี่ยน กระแสที่กำหนด I ของไทริสเตอร์คือค่าเฉลี่ยที่ใหญ่ที่สุดของกระแสที่ไหลในทิศทางไปข้างหน้าซึ่งไม่ทำให้เกิดความร้อนสูงเกินไปที่ยอมรับไม่ได้
แรงดันไฟฟ้าที่กำหนด Un เรียกว่าแรงดันไฟฟ้าแอมพลิจูดสูงสุดที่อนุญาตซึ่งรับประกันความน่าเชื่อถือที่กำหนดของอุปกรณ์
แรงดันตก Δไม่ได้สร้างโดยกระแสที่กำหนดเรียกว่า แรงดันตกเล็กน้อย (ปกติ ΔUn = 1 — 2 V)
ค่าความแรงของกระแสไฟฟ้า Ic ของการแก้ไขจะผันผวนภายในขอบเขต 0.1 — 0.4 A ที่แรงดันไฟฟ้า Uc 6 — 8 V.
ไทริสเตอร์เปิดได้อย่างน่าเชื่อถือด้วยระยะเวลาพัลส์ 20 — 30 μs ช่วงเวลาระหว่างพัลส์ไม่ควรน้อยกว่า 100 μs เมื่อแรงดันไฟฟ้า Ua ลดลงถึงศูนย์ ไทริสเตอร์จะปิด
การออกแบบภายนอกของไทริสเตอร์แสดงในรูปที่1, v… โครงสร้างสี่ชั้นของซิลิกอนที่สิบหกที่ใช้ทองแดงเป็นส่วนประกอบหลัก 2 มีหางแบบเกลียวพร้อมกำลังไฟลบ 3 และการควบคุม 4 เอาต์พุต โครงสร้างซิลิกอนได้รับการปกป้องด้วยตัวเรือนโลหะทรงกระบอก 5. ฉนวนถูกยึดไว้ในตัวเรือน 6. เกลียวในฐาน 1 ใช้เพื่อติดตั้งไทริสเตอร์และเชื่อมต่อแหล่งจ่ายแรงดันแอโนดกับขั้วบวก
เมื่อแรงดันไฟฟ้า Ua เพิ่มขึ้น กระแสควบคุมที่จำเป็นในการเปิดไทริสเตอร์จะลดลง (ดูรูปที่ 1, b) กระแสเปิดควบคุมเป็นสัดส่วนกับแรงดันเปิดควบคุม uyo
หากUа เปลี่ยนแปลงตามกฎไซน์ (รูปที่ 2) แรงดันไฟฟ้าที่ต้องการและช่องเปิด 0 สามารถแสดงด้วยเส้นประ หากแรงดันไฟฟ้าควบคุมที่ใช้ Uy1 เป็นค่าคงที่และค่าต่ำกว่าค่าต่ำสุดของแรงดันไฟฟ้า uuo แสดงว่าไทริสเตอร์จะไม่เปิด
หากแรงดันควบคุมเพิ่มขึ้นเป็นค่า Uy2 ไทริสเตอร์จะเปิดทันทีที่แรงดัน Uy2 มากกว่าแรงดัน uyo โดยการเปลี่ยนค่า uu คุณสามารถเปลี่ยนมุมเปิดของไทริสเตอร์ในช่วงตั้งแต่ 0 ถึง 90°
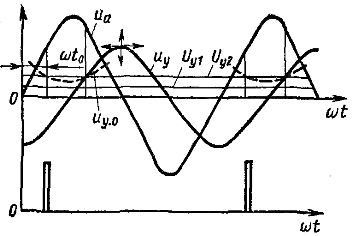
ข้าว. 2. การควบคุมไทริสเตอร์
ในการเปิดไทริสเตอร์ที่มุมสูงกว่า 90 °จะใช้แรงดันควบคุมแบบแปรผัน uy ซึ่งจะเปลี่ยนแปลงเช่นไซน์ ที่แรงดันไฟฟ้าที่สอดคล้องกับจุดตัดของคลื่นไซน์ของแรงดันไฟฟ้านี้ด้วยเส้นโค้งประ uuo = f (ωt) Tiristor จะเปิดขึ้น
โดยการเลื่อนไซน์ไซด์ uyo ในแนวนอนไปทางขวาหรือซ้าย คุณสามารถเปลี่ยนมุม ωt0 เปิดของไทริสเตอร์ได้ การควบคุมมุมเปิดนี้เรียกว่าแนวนอน ดำเนินการโดยใช้สวิตช์เฟสพิเศษ
ด้วยการเลื่อนคลื่นไซน์เดียวกันในแนวตั้งขึ้นหรือลง คุณสามารถเปลี่ยนมุมเปิดได้ การจัดการดังกล่าวเรียกว่าแนวดิ่ง ในกรณีนี้ ด้วยการควบคุมแรงดันไฟฟ้าแบบแปรผัน tyy ให้เพิ่มแรงดันคงที่เชิงพีชคณิต ตัวอย่างเช่น แรงดัน Uy1... มุมเปิดจะถูกปรับโดยการเปลี่ยนขนาดของแรงดันนี้
เมื่อเปิดแล้ว ไทริสเตอร์จะยังคงเปิดอยู่จนกว่าจะสิ้นสุดครึ่งรอบที่เป็นบวก และแรงดันไฟฟ้าควบคุมจะไม่ส่งผลต่อการทำงานของมัน นอกจากนี้ยังทำให้สามารถใช้การควบคุมพัลส์ได้โดยใช้พัลส์แรงดันบวกควบคุมเป็นระยะ ๆ ในเวลาที่เหมาะสม (รูปที่ 2 ด้านล่าง) สิ่งนี้จะเพิ่มความชัดเจนของการควบคุม
ด้วยการเปลี่ยนมุมเปิดของไทริสเตอร์ไม่ทางใดก็ทางหนึ่ง ผู้ใช้สามารถใช้พัลส์แรงดันไฟฟ้าที่มีรูปร่างต่างกันได้ สิ่งนี้จะเปลี่ยนค่าของแรงดันเฉลี่ยที่ขั้วของผู้ใช้
อุปกรณ์ต่างๆ ใช้ในการควบคุมไทริสเตอร์ ในรูปแบบที่แสดงในรูปที่ 3 แรงดันไฟหลัก AC ใช้กับขดลวดปฐมภูมิของหม้อแปลง Tp1
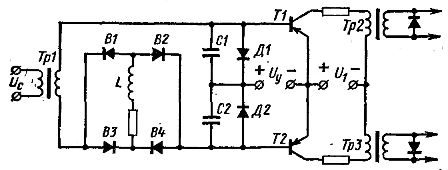
ข้าว. 3. วงจรควบคุมไทริสเตอร์
วงจรเรียงกระแสแบบเต็มคลื่น B รวมอยู่ในวงจรทุติยภูมิของหม้อแปลงนี้1, B2, B3, B4 ที่มีความเหนี่ยวนำ L อย่างมีนัยสำคัญในวงจร DC กระแสคลื่นที่ใช้งานได้จริงจะถูกกำจัดออกไป แต่กระแสตรงดังกล่าวสามารถรับได้โดยการแก้ไขแบบเต็มคลื่นของกระแสสลับที่มีรูปแบบดังแสดงในรูปที่ 4, ก.
ดังนั้นในกรณีนี้ วงจรเรียงกระแส B1, B2, B3, B4 (ดูรูปที่ 3) เป็นตัวแปลงในรูปของกระแสสลับ ในโครงร่างนี้ ตัวเก็บประจุ C1 และ C2 จะสลับเป็นอนุกรมกับพัลส์กระแสรูปสี่เหลี่ยมผืนผ้า (รูปที่ 4, a)ในกรณีนี้บนแผ่นของตัวเก็บประจุ C1 และ C2 (รูปที่ 4, b) จะเกิดแรงดันฟันเลื่อยตามขวางนำไปใช้กับฐานของทรานซิสเตอร์ T1 และ T2 (ดูรูปที่ 3)
แรงดันนี้เรียกว่าแรงดันอ้างอิง แรงดันไฟฟ้ากระแสตรง Uy ยังทำหน้าที่ในวงจรหลักของทรานซิสเตอร์แต่ละตัว เมื่อแรงดันเลื่อยเป็นศูนย์ แรงดัน Uy จะสร้างศักย์ไฟฟ้าบวกที่ฐานของทรานซิสเตอร์ทั้งสอง ทรานซิสเตอร์แต่ละตัวเปิดด้วยกระแสเบสที่ศักย์ไฟฟ้าลบ
สิ่งนี้เกิดขึ้นเมื่อค่าลบของแรงดันอ้างอิงเลื่อยมีค่ามากกว่า Uy (รูปที่ 4, b) เงื่อนไขนี้สำเร็จขึ้นอยู่กับค่าของ Uy ที่ค่าต่าง ๆ ของมุมเฟส ในกรณีนี้ ทรานซิสเตอร์จะเปิดขึ้นในช่วงเวลาต่างๆ ขึ้นอยู่กับขนาดของแรงดันไฟฟ้า Uy
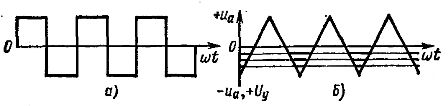
ข้าว. 4. ไดอะแกรมของแรงดันควบคุมไทริสเตอร์
เมื่อทรานซิสเตอร์ตัวใดตัวหนึ่งเปิดขึ้น พัลส์กระแสรูปสี่เหลี่ยมผืนผ้าจะผ่านขดลวดปฐมภูมิของหม้อแปลง Tr2 หรือ Tr3 (ดูรูปที่ 3) เมื่อขอบนำของพัลส์นี้ผ่านไป พัลส์แรงดันจะเกิดขึ้นในขดลวดทุติยภูมิซึ่งนำไปใช้กับอิเล็กโทรดควบคุมของไทริสเตอร์
เมื่อด้านหลังของพัลส์ปัจจุบันผ่านขดลวดทุติยภูมิ จะเกิดพัลส์แรงดันของขั้วตรงข้าม พัลส์นี้ถูกปิดโดยไดโอดเซมิคอนดักเตอร์ที่ข้ามขดลวดทุติยภูมิและไม่ได้นำไปใช้กับไทริสเตอร์
เมื่อไทริสเตอร์ถูกควบคุม (ดูรูปที่ 3) ด้วยหม้อแปลงสองตัว จะมีการสร้างพัลส์สองตัว เฟสจะเลื่อนไป 180 °
ระบบควบคุมมอเตอร์ไทริสเตอร์
ในระบบควบคุมไทริสเตอร์สำหรับมอเตอร์กระแสตรง การเปลี่ยนแปลงของแรงดันกระดอง DC ของมอเตอร์จะใช้เพื่อควบคุมความเร็ว ในกรณีเหล่านี้ มักใช้แผนการแก้ไขแบบหลายเฟส
ในรูป 5 และแผนภาพที่ง่ายที่สุดของประเภทนี้แสดงด้วยเส้นทึบ ในวงจรนี้ไทริสเตอร์ T1, T2, T3 แต่ละตัวเชื่อมต่อแบบอนุกรมกับขดลวดทุติยภูมิของหม้อแปลงและกระดองมอเตอร์ สวพ.FM91 เป็นต้น ค. ขดลวดทุติยภูมิอยู่นอกเฟส ดังนั้นพัลส์แรงดันไฟฟ้าที่เปลี่ยนเฟสสัมพันธ์กันจะถูกนำไปใช้กับกระดองมอเตอร์เมื่อควบคุมมุมเปิดของไทริสเตอร์
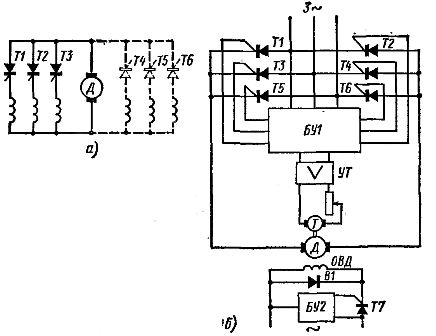
ข้าว. 5. วงจรขับไทริสเตอร์
ในวงจรโพลีเฟส กระแสที่ไม่ต่อเนื่องและต่อเนื่องสามารถผ่านกระดองของมอเตอร์ได้ ขึ้นอยู่กับมุมการยิงที่เลือกของไทริสเตอร์ ไดรฟ์ไฟฟ้าแบบย้อนกลับ (รูปที่ 5, a, วงจรทั้งหมด) ใช้ไทริสเตอร์สองชุด: T1, T2, T3 และ T4, T5, T6
โดยการเปิดไทริสเตอร์ของบางกลุ่ม พวกมันจะเปลี่ยนทิศทางของกระแสในกระดองของมอเตอร์ไฟฟ้าและตามด้วยทิศทางการหมุนของมัน
การย้อนกลับของมอเตอร์สามารถทำได้โดยการเปลี่ยนทิศทางของกระแสในสนามที่คดเคี้ยวของมอเตอร์ การย้อนกลับดังกล่าวใช้ในกรณีที่ไม่ต้องการความเร็วสูงเนื่องจากการพันสนามมีความเหนี่ยวนำสูงมากเมื่อเทียบกับการพันขดลวด จังหวะย้อนกลับนี้มักใช้สำหรับไดรฟ์ไทริสเตอร์ของการเคลื่อนที่หลักของเครื่องตัดโลหะ
ไทริสเตอร์ชุดที่สองยังทำให้สามารถใช้โหมดการเบรกที่ต้องการเปลี่ยนทิศทางของกระแสในกระดองของมอเตอร์ไฟฟ้าไทริสเตอร์ในวงจรไดรฟ์ที่อยู่ระหว่างการพิจารณาจะใช้เพื่อเปิดและปิดมอเตอร์ เช่นเดียวกับการจำกัดกระแสสตาร์ทและการเบรก ทำให้ไม่ต้องใช้คอนแทค เช่นเดียวกับรีโอสแตตสตาร์ทและเบรก
ในวงจรไดรฟ์ DC ไทริสเตอร์ หม้อแปลงไฟฟ้าเป็นสิ่งที่ไม่พึงปรารถนา พวกเขาเพิ่มขนาดและค่าใช้จ่ายในการติดตั้ง ดังนั้นพวกเขาจึงมักจะใช้วงจรที่แสดงในรูปที่ 5 บ.
ในวงจรนี้การจุดระเบิดของไทริสเตอร์จะถูกควบคุมโดยชุดควบคุม BU1 มันเชื่อมต่อกับเครือข่ายกระแสสามเฟสดังนั้นจึงให้พลังงานและจับคู่เฟสของพัลส์ควบคุมกับแรงดันแอโนดของไทริสเตอร์
ไดรฟ์ไทริสเตอร์มักจะใช้การตอบสนองความเร็วของมอเตอร์ ในกรณีนี้ จะใช้ตัวสร้างความเร็วรอบ T และแอมพลิฟายเออร์ทรานซิสเตอร์ระดับกลาง UT นอกจากนี้ยังใช้ข้อเสนอแนะอีเมล เป็นต้น c. มอเตอร์ไฟฟ้า รับรู้โดยการกระทำพร้อมกันของผลป้อนกลับเชิงลบต่อแรงดันไฟฟ้าและผลตอบรับเชิงบวกต่อกระแสกระดอง
ในการปรับกระแสกระตุ้นจะใช้ไทริสเตอร์ T7 พร้อมชุดควบคุม BU2 ที่ครึ่งรอบเชิงลบของแรงดันแอโนด เมื่อไทริสเตอร์ T7 ไม่ผ่านกระแส กระแสใน OVD จะยังคงไหลเนื่องจาก e เป็นต้น ค. การเหนี่ยวนำตัวเอง, ปิดผ่านวาล์วบายพาส B1.
ไดรฟ์ไฟฟ้าไทริสเตอร์พร้อมการควบคุมความกว้างของพัลส์
ในไดรฟ์ไทริสเตอร์ที่พิจารณา มอเตอร์จะขับเคลื่อนด้วยพัลส์แรงดันไฟฟ้าที่มีความถี่ 50 Hz เพื่อเพิ่มความเร็วในการตอบสนอง ขอแนะนำให้เพิ่มความถี่พัลส์สิ่งนี้ทำได้ในไดรฟ์ไทริสเตอร์ที่มีการควบคุมความกว้างของพัลส์ โดยที่พัลส์ DC รูปสี่เหลี่ยมผืนผ้าที่มีระยะเวลาต่างกัน (ละติจูด) ที่มีความถี่สูงถึง 2-5 kHz ผ่านกระดองมอเตอร์ นอกเหนือจากการตอบสนองความเร็วสูงแล้ว การควบคุมดังกล่าวยังให้ช่วงการควบคุมความเร็วของมอเตอร์ขนาดใหญ่และประสิทธิภาพการใช้พลังงานที่สูงขึ้นอีกด้วย
ด้วยการควบคุมความกว้างของพัลส์ มอเตอร์จะขับเคลื่อนโดยวงจรเรียงกระแสที่ไม่มีการควบคุม และไทริสเตอร์ที่ต่ออนุกรมกับกระดองจะปิดและเปิดเป็นระยะๆ ในกรณีนี้ DC พัลส์จะผ่านวงจรกระดองของมอเตอร์ การเปลี่ยนแปลงระยะเวลา (ละติจูด) ของพัลส์เหล่านี้ส่งผลให้ความเร็วของการหมุนของมอเตอร์ไฟฟ้าเปลี่ยนไป
เนื่องจากในกรณีนี้ไทริสเตอร์ทำงานที่แรงดันคงที่จึงใช้วงจรพิเศษเพื่อปิด หนึ่งในแผนการควบคุมความกว้างของพัลส์ที่ง่ายที่สุดแสดงในรูปที่ 6.
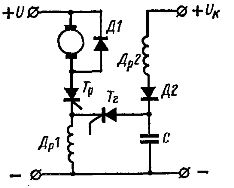
ข้าว. 6. ไดรฟ์ไฟฟ้าไทริสเตอร์พร้อมการควบคุมความกว้างของพัลส์
ในวงจรนี้ไทริสเตอร์ Tr จะปิดเมื่อเปิดไทริสเตอร์ที่ทำให้หมาด ๆ เมื่อไทริสเตอร์นี้เปิดขึ้น ตัวเก็บประจุที่มีประจุ C จะปล่อยออกมา เค้น Dr1 สร้าง e อย่างมีนัยสำคัญ เป็นต้น ค. ในกรณีนี้ แรงดันไฟฟ้าจะปรากฏขึ้นที่ส่วนท้ายของโช้คซึ่งมากกว่าแรงดัน U ของวงจรเรียงกระแสและพุ่งเข้าหามัน
ผ่านวงจรเรียงกระแสและไดโอด shunt D1 แรงดันไฟฟ้านี้ใช้กับไทริสเตอร์ Tr และทำให้ปิด เมื่อปิดไทริสเตอร์ ตัวเก็บประจุ C จะถูกชาร์จอีกครั้งที่แรงดันสวิตชิ่ง Uc > U
เนื่องจากความถี่ที่เพิ่มขึ้นของพัลส์ปัจจุบันและความเฉื่อยของกระดองมอเตอร์ ลักษณะพัลส์ของแหล่งจ่ายไฟจึงไม่สะท้อนในความเรียบของการหมุนของมอเตอร์ ไทริสเตอร์ Tr และ Tr ถูกเปิดโดยวงจรเลื่อนเฟสพิเศษที่ช่วยให้เปลี่ยนความกว้างของพัลส์ได้
อุตสาหกรรมไฟฟ้าผลิตการดัดแปลงต่างๆ ของไดรฟ์ไฟฟ้ากระแสตรงไทริสเตอร์ที่มีการควบคุมอย่างสมบูรณ์ ในหมู่พวกเขาคือไดรฟ์ที่มีช่วงการควบคุมความเร็ว 1:20; 1:200; 1: 2000 โดยการเปลี่ยนแรงดันไฟฟ้า ไดรฟ์กลับไม่ได้และย้อนกลับได้ โดยมีและไม่มีเบรกไฟฟ้า การควบคุมดำเนินการโดยใช้อุปกรณ์เฟสพัลส์ของทรานซิสเตอร์ ไดรฟ์ใช้ความคิดเห็นเชิงลบต่อรอบต่อนาทีของมอเตอร์และตัวนับ e เป็นต้น กับ
ข้อดีของไดรฟ์ไทริสเตอร์คือลักษณะพลังงานสูง, ขนาดและน้ำหนักที่เล็ก, ไม่มีเครื่องจักรหมุนอื่นใดนอกจากมอเตอร์ไฟฟ้า, ความเร็วสูงและความพร้อมในการทำงานอย่างต่อเนื่อง ข้อเสียเปรียบหลักของไดรฟ์ไทริสเตอร์คือราคายังคงสูง ซึ่งเกินอย่างมาก ค่าไดรฟ์ด้วยเครื่องไฟฟ้าและเครื่องขยายสัญญาณแม่เหล็ก
ปัจจุบัน มีแนวโน้มอย่างต่อเนื่องในการเปลี่ยนไดร์ฟ thyristor DC อย่างแพร่หลาย ไดรฟ์ AC ความถี่ตัวแปร.