ไดรฟ์ไฟฟ้าของหน่วยปั๊มที่มีความถี่
 โหมดการทำงานของปั๊มหอยโข่งประหยัดพลังงานที่สุดในการปรับโดยเปลี่ยนความเร็วรอบการหมุนของล้อ ความเร็วในการหมุนของล้อสามารถเปลี่ยนแปลงได้หากใช้ไดรฟ์ไฟฟ้าแบบปรับได้เป็นมอเตอร์ขับเคลื่อน
โหมดการทำงานของปั๊มหอยโข่งประหยัดพลังงานที่สุดในการปรับโดยเปลี่ยนความเร็วรอบการหมุนของล้อ ความเร็วในการหมุนของล้อสามารถเปลี่ยนแปลงได้หากใช้ไดรฟ์ไฟฟ้าแบบปรับได้เป็นมอเตอร์ขับเคลื่อน
การออกแบบและคุณลักษณะของกังหันแก๊สและเครื่องยนต์สันดาปภายในนั้นสามารถเปลี่ยนแปลงความเร็วรอบภายในช่วงที่กำหนดได้
กระบวนการปรับความเร็วในการหมุนของแต่ละกลไกได้รับการวิเคราะห์อย่างสะดวกโดยใช้ลักษณะทางกลของอุปกรณ์
พิจารณาลักษณะทางกลของเครื่องสูบน้ำที่ประกอบด้วยเครื่องสูบน้ำและมอเตอร์ไฟฟ้า ในรูป รูปที่ 1 แสดงลักษณะทางกลของปั๊มหอยโข่งที่ติดตั้งเช็ควาล์ว (เส้นโค้ง 1) และมอเตอร์ไฟฟ้าที่มีโรเตอร์กรงกระรอก (เส้นโค้ง 2)
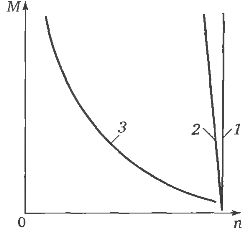
ข้าว. 1. ลักษณะทางกลของหน่วยสูบน้ำ
ความแตกต่างระหว่างค่าแรงบิดของมอเตอร์ไฟฟ้าและแรงบิดต้านทานของปั๊มเรียกว่าแรงบิดไดนามิกถ้าแรงบิดของมอเตอร์มากกว่าโมเมนต์ต้านทานของปั๊ม แรงบิดไดนามิกจะถือว่าเป็นค่าบวก ถ้าค่าน้อยกว่าจะเป็นค่าลบ
ภายใต้อิทธิพลของช่วงเวลาไดนามิกเชิงบวก หน่วยปั๊มเริ่มทำงานด้วยความเร่ง เช่น เร่ง หากแรงบิดไดนามิกเป็นลบ ชุดปั๊มจะทำงานโดยมีความล่าช้า เช่น ช้าลง.
เมื่อช่วงเวลาเหล่านี้เท่ากัน โหมดการทำงานแบบอยู่กับที่จะเกิดขึ้น เช่น หน่วยปั๊มทำงานที่ความเร็วคงที่ ความเร็วและแรงบิดที่สอดคล้องกันนี้กำหนดโดยจุดตัดของลักษณะทางกลของมอเตอร์ไฟฟ้าและปั๊ม (จุด a ในรูปที่ 1)
หากในกระบวนการปรับไม่ทางใดก็ทางหนึ่ง ลักษณะทางกลเปลี่ยนไป เช่น อ่อนลงโดยการใส่ตัวต้านทานเพิ่มเติมในวงจรโรเตอร์ของมอเตอร์ไฟฟ้า (เส้นโค้ง 3 ในรูปที่ 1) แรงบิดของมอเตอร์ไฟฟ้า จะกลายเป็นช่วงเวลาแห่งการต่อต้านเพียงเล็กน้อย
ภายใต้อิทธิพลของแรงบิดไดนามิกเชิงลบ ชุดปั๊มจะเริ่มทำงานโดยมีความล่าช้า เช่น ช้าลงจนกว่าแรงบิดและโมเมนต์แรงต้านจะสมดุลกันอีกครั้ง (จุด b ในรูปที่ 1) จุดนี้สอดคล้องกับค่าเฉพาะของความเร็วและแรงบิด
ดังนั้นกระบวนการควบคุมความเร็วของการหมุนของหน่วยสูบน้ำจึงมาพร้อมกับการเปลี่ยนแปลงของแรงบิดของมอเตอร์ไฟฟ้าและโมเมนต์ต้านทานของปั๊มอย่างต่อเนื่อง
การควบคุมความเร็วของปั๊มสามารถทำได้โดยการเปลี่ยนความเร็วของมอเตอร์ไฟฟ้าซึ่งเชื่อมต่อกับปั๊มอย่างแน่นหนา หรือโดยการเปลี่ยนอัตราทดเกียร์ของชุดส่งกำลังที่เชื่อมต่อปั๊มกับมอเตอร์ไฟฟ้าซึ่งทำงานที่ความเร็วคงที่

การควบคุมความเร็วของการหมุนของมอเตอร์ไฟฟ้า
มอเตอร์ AC ส่วนใหญ่จะใช้ในหน่วยสูบน้ำ ความเร็วในการหมุนของมอเตอร์ AC ขึ้นอยู่กับความถี่ของกระแสจ่าย f จำนวนคู่ขั้ว p และสลิป s คุณสามารถเปลี่ยนความเร็วของมอเตอร์ไฟฟ้าและปั๊มที่เชื่อมต่อได้โดยการเปลี่ยนพารามิเตอร์เหล่านี้อย่างน้อยหนึ่งรายการ
องค์ประกอบหลักของไดรฟ์ไฟฟ้าความถี่คือ ตัวแปลงความถี่… อินเวอร์เตอร์มีความถี่กริดคงที่ f1 ที่แปลงเป็นตัวแปร e2 สัดส่วนกับความถี่ e2 เปลี่ยนความเร็วของมอเตอร์ไฟฟ้าที่เชื่อมต่อกับเอาต์พุตของตัวแปลง
ด้วยตัวแปลงความถี่ แรงดันไฟหลัก U1 และความถี่จริงจะไม่เปลี่ยน f1 ที่แปลงเป็นพารามิเตอร์ตัวแปร U2 และ e2 ที่จำเป็นสำหรับระบบควบคุม เพื่อให้มอเตอร์ไฟฟ้าทำงานได้อย่างเสถียร เพื่อจำกัดโอเวอร์โหลดในแง่ของกระแสและฟลักซ์แม่เหล็ก เพื่อรักษาตัวบ่งชี้พลังงานสูงในตัวแปลงความถี่ ต้องรักษาอัตราส่วนที่แน่นอนระหว่างพารามิเตอร์อินพุตและเอาต์พุตขึ้นอยู่กับประเภทของ ลักษณะเฉพาะของปั๊มเชิงกล ความสัมพันธ์เหล่านี้ได้มาจากสมการกฎหมายควบคุมความถี่
สำหรับเครื่องสูบน้ำจะต้องปฏิบัติตามอัตราส่วน:
U1 / f1 = U2 / f2 = ค่าคงที่
ในรูป 2 แสดงลักษณะทางกลของมอเตอร์เหนี่ยวนำที่มีการควบคุมความถี่เมื่อความถี่ f2 ลดลง คุณลักษณะเชิงกลไม่เพียงแต่เปลี่ยนตำแหน่งในพิกัด n — M เท่านั้น แต่ยังเปลี่ยนรูปร่างในระดับหนึ่งด้วย โดยเฉพาะอย่างยิ่งแรงบิดสูงสุดของมอเตอร์ไฟฟ้าจะลดลง นี่คือความจริงที่ว่าด้วยอัตราส่วน U1 / f1 = U2 / f2 = const และการเปลี่ยนแปลงความถี่ f1 ไม่ได้คำนึงถึงผลกระทบของความต้านทานที่ใช้งานของสเตเตอร์ต่อขนาดของแรงบิดของมอเตอร์

ข้าว. 2. ลักษณะทางกลของไดรฟ์ไฟฟ้าความถี่ที่ความถี่สูงสุด (1) และลด (2)
เมื่อปรับความถี่โดยคำนึงถึงอิทธิพลนี้ แรงบิดสูงสุดยังคงไม่เปลี่ยนแปลง รูปร่างของลักษณะทางกลจะยังคงอยู่ เฉพาะตำแหน่งเท่านั้นที่เปลี่ยนไป
ตัวแปลงความถี่ด้วย การปรับความกว้างพัลส์ (PWM) มีลักษณะพลังงานสูงเนื่องจากรูปร่างของเส้นโค้งของกระแสและแรงดันที่เข้าใกล้ซายน์นั้นมีให้ที่เอาต์พุตของตัวแปลง เมื่อเร็ว ๆ นี้ตัวแปลงความถี่ที่ใช้โมดูล IGBT (ทรานซิสเตอร์สองขั้วแบบเกทหุ้มฉนวน) นั้นแพร่หลายที่สุด
โมดูล IGBT เป็นองค์ประกอบสำคัญที่มีประสิทธิภาพสูง มีแรงดันตกคร่อมต่ำ ความเร็วสูง และกำลังสวิตชิ่งต่ำ ตัวแปลงความถี่ที่ใช้โมดูล IGBT พร้อม PWM และอัลกอริธึมเวกเตอร์สำหรับการควบคุมมอเตอร์แบบอะซิงโครนัสมีข้อได้เปรียบเหนือตัวแปลงประเภทอื่นๆ มีตัวประกอบกำลังสูงตลอดช่วงความถี่เอาต์พุตทั้งหมด
แผนผังไดอะแกรมของตัวแปลงแสดงในรูปที่ 3.
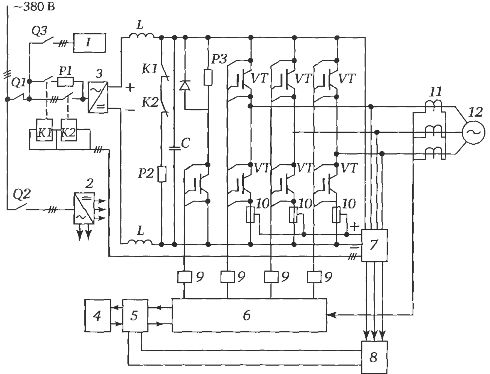
ข้าว. 3.รูปแบบตัวแปลงความถี่ของโมดูล IGBT: 1 - บล็อกของพัดลม 2 — แหล่งจ่ายไฟ; 3 — วงจรเรียงกระแสที่ไม่มีการควบคุม; 4 — แผงควบคุม; 5 — แผงแผงควบคุม; 6 — PWM; 7 — หน่วยแปลงแรงดันไฟฟ้า 8 — แผงควบคุมระบบ 9 — ไดรเวอร์; 10 — ฟิวส์สำหรับหน่วยอินเวอร์เตอร์ 11 — เซ็นเซอร์ปัจจุบัน 12 — มอเตอร์กรงกระรอกแบบอะซิงโครนัส; Q1, Q2, Q3 — สวิตช์สำหรับวงจรไฟฟ้า วงจรควบคุม และยูนิตพัดลม K1, K2 — คอนแทคสำหรับชาร์จตัวเก็บประจุและวงจรไฟฟ้า C — ธนาคารตัวเก็บประจุ; Rl, R2, R3 — ตัวต้านทานสำหรับการจำกัดกระแสของประจุตัวเก็บประจุ, การคายประจุของตัวเก็บประจุและบล็อกท่อระบายน้ำ; VT - สวิตช์ไฟอินเวอร์เตอร์ (โมดูล IGBT)
ที่เอาต์พุตของตัวแปลงความถี่ จะเกิดเส้นโค้งแรงดัน (กระแส) ซึ่งแตกต่างจากไซน์ไซด์เล็กน้อย ซึ่งมีส่วนประกอบฮาร์มอนิกที่สูงกว่า การปรากฏตัวของพวกเขานำไปสู่การสูญเสียที่เพิ่มขึ้นในมอเตอร์ไฟฟ้า ด้วยเหตุนี้ เมื่อไดรฟ์ไฟฟ้าทำงานที่ความเร็วใกล้เคียงกับความเร็วที่กำหนด มอเตอร์ไฟฟ้าจึงโอเวอร์โหลด
เมื่อทำงานที่ความเร็วลดลง สภาวะการระบายความร้อนสำหรับมอเตอร์ไฟฟ้าแบบระบายอากาศได้เองที่ใช้ในระบบขับเคลื่อนปั๊มจะลดลง ในช่วงการควบคุมปกติของหน่วยสูบน้ำ (1: 2 หรือ 1: 3) การเสื่อมสภาพของสภาวะการระบายอากาศนี้ได้รับการชดเชยด้วยภาระที่ลดลงอย่างมากเนื่องจากการลดลงของอัตราการไหลและหัวปั๊ม
เมื่อทำงานที่ความถี่ใกล้เคียงกับค่าเล็กน้อย (50 Hz) การเสื่อมสภาพของสภาวะการทำความเย็นร่วมกับการปรากฏตัวของฮาร์มอนิกในลำดับที่สูงขึ้นนั้นจำเป็นต้องลดกำลังเชิงกลที่อนุญาตลง 8-15%ด้วยเหตุนี้ แรงบิดสูงสุดของมอเตอร์ไฟฟ้าจึงลดลง 1 — 2% ประสิทธิภาพ — 1 — 4% cosφ — 5-7%
เพื่อหลีกเลี่ยงการโอเวอร์โหลดมอเตอร์ไฟฟ้า จำเป็นต้องจำกัดค่าบนของความเร็วหรือติดตั้งมอเตอร์ไฟฟ้าที่ทรงพลังกว่าให้กับไดรฟ์ มาตรการสุดท้ายมีผลบังคับใช้เมื่อหน่วยสูบน้ำได้รับการออกแบบให้ทำงานที่ความถี่ e2> 50 Hz การจำกัดค่าบนของรอบเครื่องยนต์ทำได้โดยการจำกัดความถี่ e2 เป็น 48 Hz การเพิ่มกำลังพิกัดของมอเตอร์ขับเคลื่อนจะปัดขึ้นเป็นค่ามาตรฐานที่ใกล้ที่สุด

การควบคุมกลุ่มของไดรฟ์บล็อกไฟฟ้าแบบแปรผัน
ชุดปั๊มหลายชุดประกอบด้วยหลายบล็อก ตามกฎแล้วไม่ใช่ทุกยูนิตที่มีไดรฟ์ไฟฟ้าแบบปรับได้ จากยูนิตที่ติดตั้งสองหรือสามยูนิตก็เพียงพอแล้วที่จะติดตั้งไดรฟ์ไฟฟ้าแบบปรับได้ หากคอนเวอร์เตอร์เชื่อมต่อกับหนึ่งในยูนิตอย่างถาวร จะมีการใช้ทรัพยากรมอเตอร์ที่ไม่สม่ำเสมอ เนื่องจากยูนิตที่ติดตั้งไดรฟ์ความเร็วแปรผันจะถูกใช้เป็นเวลานานกว่ามาก
สำหรับการกระจายโหลดที่สม่ำเสมอระหว่างบล็อกทั้งหมดที่ติดตั้งที่สถานีได้มีการพัฒนาสถานีควบคุมกลุ่มโดยใช้บล็อกที่สามารถเชื่อมต่อแบบอนุกรมกับตัวแปลงได้ สถานีควบคุมมักจะผลิตขึ้นสำหรับหน่วยแรงดันต่ำ (380 V)
โดยทั่วไปแล้ว สถานีควบคุมแรงดันต่ำถูกออกแบบมาเพื่อควบคุมสองหรือสามยูนิตสถานีควบคุมแรงดันต่ำประกอบด้วยเซอร์กิตเบรกเกอร์ที่ป้องกันการลัดวงจรของเฟสเฟสและการต่อลงดิน เทอร์มอลรีเลย์เพื่อป้องกันอุปกรณ์จากการโอเวอร์โหลด เช่นเดียวกับอุปกรณ์ควบคุม (สวิตช์ โพสต์ปุ่ม และคนอื่น ๆ.).
วงจรสวิตชิ่งของสถานีควบคุมประกอบด้วยอินเตอร์ล็อคที่จำเป็นซึ่งช่วยให้สามารถเชื่อมต่อตัวแปลงความถี่กับบล็อกที่เลือกและเปลี่ยนบล็อกการทำงานได้โดยไม่รบกวนโหมดเทคโนโลยีการทำงานของชุดปั๊มหรือเป่า
ตามกฎแล้วสถานีควบคุมพร้อมกับองค์ประกอบพลังงาน (สวิตช์อัตโนมัติ, คอนแทคเตอร์ ฯลฯ ) ประกอบด้วยอุปกรณ์ควบคุมและควบคุม (ตัวควบคุมไมโครโปรเซสเซอร์ ฯลฯ )
ตามคำร้องขอของลูกค้า สถานีต่างๆ ได้รับการติดตั้งอุปกรณ์สำหรับการเปิดไฟฟ้าสำรองอัตโนมัติ (ATS) การวัดปริมาณไฟฟ้าที่ใช้แล้วในเชิงพาณิชย์ การควบคุมอุปกรณ์ปิดระบบ
หากจำเป็น จะมีการแนะนำอุปกรณ์เพิ่มเติมในสถานีควบคุม ซึ่งรับประกันการใช้งานพร้อมกับตัวแปลงความถี่ของชุดซอฟต์สตาร์ทของยูนิต
สถานีควบคุมอัตโนมัติให้:
-
การรักษาค่าที่ตั้งไว้ของพารามิเตอร์ทางเทคโนโลยี (ความดัน, ระดับ, อุณหภูมิ, ฯลฯ );
-
การควบคุมโหมดการทำงานของมอเตอร์ไฟฟ้าของหน่วยที่มีการควบคุมและไม่ได้รับการควบคุม (การควบคุมกระแสไฟ, พลังงานที่ใช้ไป) และการป้องกัน
-
เริ่มต้นอัตโนมัติของอุปกรณ์สำรองในกรณีที่อุปกรณ์หลักล้มเหลว
-
การสลับบล็อกไปยังเครือข่ายโดยตรงในกรณีที่ตัวแปลงความถี่ล้มเหลว
-
การเปิดอัตโนมัติของอินพุตไฟฟ้าสำรอง (ATS)
-
การเชื่อมต่อใหม่อัตโนมัติ (AR) ของสถานีหลังจากการสูญเสียและแรงดันไฟฟ้าตกในเครือข่ายแหล่งจ่ายไฟ
-
การเปลี่ยนโหมดการทำงานของสถานีโดยอัตโนมัติด้วยการหยุดและการเริ่มต้นของหน่วยงานในเวลาที่กำหนด
-
การเปิดใช้งานหน่วยที่ไม่ได้ควบคุมเพิ่มเติมโดยอัตโนมัติหากหน่วยควบคุมถึงความเร็วที่กำหนดไม่ได้จัดหาน้ำที่จำเป็น
-
การสลับบล็อกงานอัตโนมัติในบางช่วงเวลาเพื่อให้แน่ใจว่ามีการใช้ทรัพยากรมอเตอร์อย่างสม่ำเสมอ
-
การควบคุมการทำงานของโหมดการทำงานของชุดสูบน้ำ (เป่า) จากแผงควบคุมหรือจากแผงควบคุม
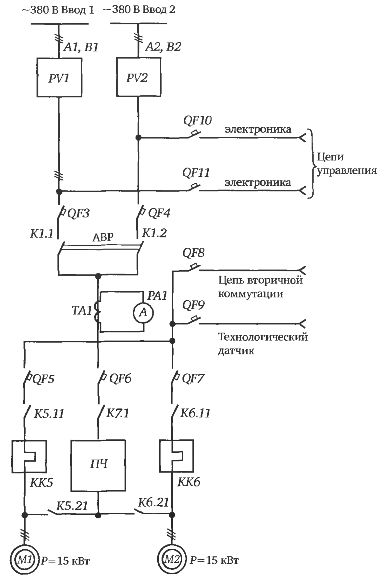
ข้าว. 4. สถานีควบคุมกลุ่มของไดรฟ์ไฟฟ้าของปั๊มความถี่ตัวแปร
ประสิทธิภาพของการใช้ความถี่ตัวแปรในหน่วยสูบน้ำ
การใช้ไดรฟ์แบบปรับความถี่ได้ช่วยให้คุณประหยัดพลังงานได้อย่างมาก เนื่องจากทำให้สามารถใช้หน่วยสูบน้ำขนาดใหญ่ที่อัตราการไหลต่ำได้ ด้วยเหตุนี้จึงเป็นไปได้โดยการเพิ่มความจุหน่วยของหน่วยเพื่อลดจำนวนทั้งหมดและลดขนาดโดยรวมของอาคารเพื่อลดความซับซ้อนของโครงร่างไฮดรอลิกของสถานีและลดจำนวนท่อส่ง วาล์ว
ดังนั้นการใช้ไดรฟ์ไฟฟ้าแบบปรับได้ในหน่วยสูบน้ำจึงช่วยประหยัดไฟฟ้าและน้ำ ลดจำนวนหน่วยสูบน้ำ ลดความซับซ้อนของวงจรไฮดรอลิกของสถานีและลดปริมาณการก่อสร้างอาคารสถานีสูบน้ำในการเชื่อมต่อนี้ ผลกระทบทางเศรษฐกิจรองเกิดขึ้น: ค่าใช้จ่ายในการทำความร้อน แสงสว่าง และการซ่อมแซมอาคารลดลง ค่าใช้จ่ายที่ลดลงขึ้นอยู่กับวัตถุประสงค์ของสถานีและเงื่อนไขเฉพาะอื่น ๆ สามารถลดลงได้ 20-50%
เอกสารทางเทคนิคสำหรับตัวแปลงความถี่แสดงให้เห็นว่าการใช้ไดรฟ์ไฟฟ้าแบบปรับได้ในชุดสูบน้ำช่วยให้คุณประหยัดพลังงานได้มากถึง 50% ของพลังงานที่ใช้ในการสูบน้ำสะอาดและน้ำเสีย และระยะเวลาคืนทุนอยู่ที่สามถึงเก้าเดือน
ในเวลาเดียวกัน การคำนวณและการวิเคราะห์ประสิทธิภาพของไดรฟ์ไฟฟ้าควบคุมในหน่วยปั๊มปฏิบัติการแสดงให้เห็นว่าสำหรับหน่วยปั๊มขนาดเล็กที่มีหน่วยที่มีกำลังสูงถึง 75 กิโลวัตต์ โดยเฉพาะอย่างยิ่งเมื่อทำงานกับส่วนประกอบแรงดันสถิตขนาดใหญ่ ไม่เหมาะที่จะใช้ไดรฟ์ไฟฟ้าที่มีการควบคุม ในกรณีเหล่านี้ คุณสามารถใช้ระบบควบคุมที่ง่ายกว่าได้โดยใช้การควบคุมปริมาณ การเปลี่ยนจำนวนหน่วยปั๊มที่ทำงาน
การใช้ไดรฟ์ไฟฟ้าแบบแปรผันในระบบอัตโนมัติของชุดปั๊ม ในแง่หนึ่ง ช่วยลดการใช้พลังงาน และในทางกลับกัน ต้องใช้ต้นทุนเงินทุนเพิ่มเติม ดังนั้นความเป็นไปได้ของการใช้ไดรฟ์ไฟฟ้าแบบแปรผันในปั๊มจึงถูกกำหนดโดยการเปรียบเทียบต้นทุนที่ลดลง จากสองตัวเลือก: พื้นฐานและใหม่ หน่วยสูบน้ำที่ติดตั้งไดรฟ์ไฟฟ้าแบบปรับได้เป็นตัวเลือกใหม่และหน่วยที่ทำงานด้วยความเร็วคงที่ถือเป็นหน่วยหลัก