ตัวแปลงความถี่ - ประเภท, หลักการทำงาน, โครงร่างการเชื่อมต่อ
 โรเตอร์ของมอเตอร์ไฟฟ้าขับเคลื่อนด้วยแรงที่เกิดจากสนามแม่เหล็กไฟฟ้าที่หมุนอยู่ภายในขดลวดสเตเตอร์ ความเร็วมักจะถูกกำหนดโดยความถี่อุตสาหกรรมของกริดไฟฟ้า
โรเตอร์ของมอเตอร์ไฟฟ้าขับเคลื่อนด้วยแรงที่เกิดจากสนามแม่เหล็กไฟฟ้าที่หมุนอยู่ภายในขดลวดสเตเตอร์ ความเร็วมักจะถูกกำหนดโดยความถี่อุตสาหกรรมของกริดไฟฟ้า
ค่ามาตรฐานที่ 50 เฮิรตซ์แสดงถึงช่วงเวลาการสั่น 50 ช่วงในหนึ่งวินาที ในหนึ่งนาที จำนวนจะเพิ่มขึ้น 60 เท่า และเท่ากับ 50×60 = 3,000 รอบ โรเตอร์หมุนเป็นจำนวนครั้งเท่ากันภายใต้อิทธิพลของสนามแม่เหล็กไฟฟ้าที่ใช้
หากคุณเปลี่ยนค่าความถี่หลักที่ใช้กับสเตเตอร์ คุณจะสามารถปรับความเร็วของการหมุนของโรเตอร์และไดรฟ์ที่เชื่อมต่ออยู่ได้ หลักการนี้เป็นพื้นฐานของการควบคุมมอเตอร์ไฟฟ้า
ประเภทของตัวแปลงความถี่
ตามการออกแบบ ตัวแปลงความถี่คือ:
1. ประเภทการเหนี่ยวนำ
2. อิเล็กทรอนิกส์.
ผลิตมอเตอร์แบบอะซิงโครนัส ตามรูปแบบที่มีโรเตอร์เฟส และเริ่มต้นในโหมดเครื่องกำเนิดไฟฟ้าเป็นตัวแทนของประเภทแรก ในระหว่างการใช้งานมีประสิทธิภาพต่ำและมีประสิทธิภาพต่ำดังนั้นจึงไม่พบการใช้งานที่กว้างขวางในการผลิตและใช้น้อยมาก
วิธีการแปลงความถี่อิเล็กทรอนิกส์ช่วยให้การควบคุมความเร็วของทั้งเครื่องอะซิงโครนัสและซิงโครนัสเป็นไปอย่างราบรื่น ในกรณีนี้ สามารถใช้หลักการควบคุมหนึ่งในสองหลัก:
1. ตามลักษณะที่กำหนดไว้ล่วงหน้าของการพึ่งพาความเร็วในการหมุนกับความถี่ (V / f)
2. วิธีการควบคุมเวกเตอร์
วิธีแรกเป็นวิธีที่ง่ายที่สุดและไม่สมบูรณ์แบบ และวิธีที่สองใช้เพื่อควบคุมความเร็วในการหมุนของอุปกรณ์อุตสาหกรรมที่สำคัญได้อย่างแม่นยำ
คุณสมบัติของการควบคุมเวกเตอร์การแปลงความถี่
ความแตกต่างระหว่างวิธีนี้คือการโต้ตอบ อิทธิพลของอุปกรณ์ควบคุมคอนเวอร์เตอร์บน «สเปซเวคเตอร์» ของฟลักซ์แม่เหล็กที่หมุนด้วยความถี่ของสนามโรเตอร์
อัลกอริทึมสำหรับตัวแปลงในการทำงานตามหลักการนี้สร้างขึ้นในสองวิธี:
1. การควบคุมแบบไร้เซ็นเซอร์
2. การควบคุมการไหล
วิธีแรกขึ้นอยู่กับการพิจารณาการพึ่งพาการสลับลำดับ การปรับความกว้างพัลส์ (PWM) อินเวอร์เตอร์สำหรับอัลกอริทึมที่ตั้งไว้ล่วงหน้า ในกรณีนี้ แอมพลิจูดและความถี่ของแรงดันเอาต์พุตคอนเวอร์เตอร์จะถูกควบคุมโดยกระแสสลิปและโหลด แต่ไม่ใช้ค่าป้อนกลับความเร็วโรเตอร์
วิธีนี้ใช้เมื่อควบคุมมอเตอร์ไฟฟ้าหลายตัวที่ต่อขนานกับตัวแปลงความถี่การควบคุมฟลักซ์เกี่ยวข้องกับการตรวจสอบกระแสการทำงานภายในมอเตอร์ด้วยการสลายตัวเป็นส่วนประกอบที่ใช้งานและเกิดปฏิกิริยา และทำการปรับเปลี่ยนการทำงานของคอนเวอร์เตอร์เพื่อตั้งค่าแอมพลิจูด ความถี่ และมุมสำหรับเวกเตอร์แรงดันเอาต์พุต
สิ่งนี้ช่วยปรับปรุงความแม่นยำของเครื่องยนต์และเพิ่มขีด จำกัด ของการปรับแต่ง การใช้การควบคุมการไหลขยายขีดความสามารถของไดรฟ์ที่ทำงานด้วยความเร็วต่ำพร้อมโหลดไดนามิกสูง เช่น รอกเครนหรือเครื่องม้วนอุตสาหกรรม
การใช้เทคโนโลยีเวกเตอร์ช่วยให้สามารถควบคุมแรงบิดไดนามิกได้ มอเตอร์แบบอะซิงโครนัสสามเฟส.
วงจรสมมูล
วงจรไฟฟ้าแบบง่ายพื้นฐานของมอเตอร์เหนี่ยวนำสามารถแสดงได้ดังนี้
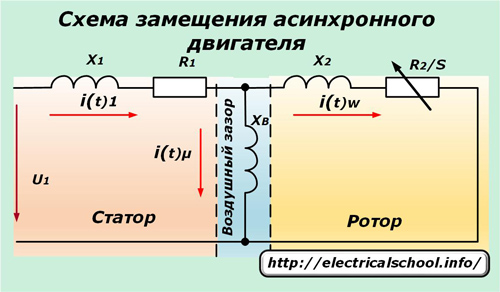
แรงดันไฟฟ้า u1 ถูกนำไปใช้กับขดลวดสเตเตอร์ ซึ่งมีความต้านทานแบบแอกทีฟ R1 และความต้านทานแบบเหนี่ยวนำ X1 มันเอาชนะความต้านทานของช่องว่างอากาศ Xv เปลี่ยนเป็นขดลวดของโรเตอร์ทำให้เกิดกระแสที่เอาชนะความต้านทานของมัน
วงจรสมมูลของวงจรเวกเตอร์
โครงสร้างช่วยให้เข้าใจกระบวนการที่เกิดขึ้นในมอเตอร์เหนี่ยวนำ

พลังงานของกระแสสเตเตอร์แบ่งออกเป็นสองส่วน:
-
iµ — พาร์ติชันที่ก่อตัวเป็นโฟลว์
-
iw — ส่วนประกอบสร้างช่วงเวลา
ในกรณีนี้ โรเตอร์มีความต้านทานแบบแอกทีฟ R2 / s ที่ขึ้นกับสลิป
สำหรับการควบคุมแบบไร้เซนเซอร์ จะมีการวัดสิ่งต่อไปนี้:
-
แรงดันไฟฟ้า u1;
-
i1 ปัจจุบัน
ตามค่าที่พวกเขาคำนวณ:
-
iµ — ส่วนประกอบของการไหลที่ก่อให้เกิดการไหล
-
iw — แรงบิดสร้างมูลค่า
อัลกอริทึมการคำนวณรวมถึงวงจรสมมูลอิเล็กทรอนิกส์ของมอเตอร์เหนี่ยวนำที่มีตัวควบคุมกระแส ซึ่งคำนึงถึงสภาวะความอิ่มตัวของสนามแม่เหล็กไฟฟ้าและการสูญเสียพลังงานแม่เหล็กในเหล็ก
ส่วนประกอบทั้งสองของเวกเตอร์ปัจจุบันซึ่งแตกต่างกันในมุมและแอมพลิจูด หมุนไปพร้อมกับระบบพิกัดของโรเตอร์ และกลายเป็นระบบการวางแนวของสเตเตอร์ที่อยู่นิ่ง
ตามหลักการนี้ พารามิเตอร์ของตัวแปลงความถี่จะถูกปรับตามโหลดของมอเตอร์เหนี่ยวนำ
หลักการทำงานของตัวแปลงความถี่
อุปกรณ์นี้ซึ่งเรียกอีกอย่างว่าอินเวอร์เตอร์ขึ้นอยู่กับการเปลี่ยนแปลงสองครั้งในรูปคลื่นของแหล่งจ่ายไฟหลัก
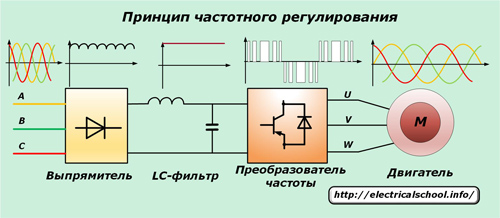
ในขั้นต้น แรงดันไฟฟ้าอุตสาหกรรมจะถูกป้อนเข้าวงจรเรียงกระแสด้วยไดโอดทรงพลังที่กำจัดฮาร์มอนิกไซน์แต่ปล่อยให้สัญญาณกระเพื่อม สำหรับการถอดตัวเก็บประจุจะมีตัวเหนี่ยวนำ (ตัวกรอง LC) ซึ่งให้รูปทรงที่มั่นคงและเรียบกับแรงดันไฟฟ้าที่แก้ไขแล้ว
จากนั้นสัญญาณจะไปยังอินพุตของตัวแปลงความถี่ ซึ่งเป็นวงจรบริดจ์สามเฟส 6 เฟส ทรานซิสเตอร์กำลัง ซีรีย์ IGBT หรือ MOSFET พร้อมไดโอดป้องกันแรงดันไฟกลับขั้ว ไทริสเตอร์ที่ใช้ก่อนหน้านี้สำหรับจุดประสงค์เหล่านี้ไม่มีความเร็วเพียงพอและทำงานโดยมีการรบกวนมาก
ในการเปิดโหมด "เบรก" ของมอเตอร์ สามารถติดตั้งทรานซิสเตอร์ควบคุมพร้อมตัวต้านทานที่ทรงพลังซึ่งกระจายพลังงานในวงจร เทคนิคนี้ช่วยให้สามารถถอดแรงดันไฟฟ้าที่สร้างโดยมอเตอร์ออกได้ เพื่อป้องกันตัวเก็บประจุตัวกรองจากการชาร์จไฟเกินและความเสียหาย
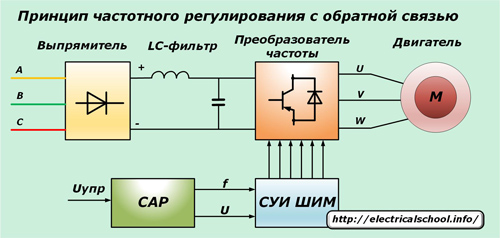
วิธีการควบคุมความถี่เวกเตอร์ของตัวแปลงช่วยให้คุณสร้างวงจรที่ทำการควบคุมสัญญาณจากระบบ ACS โดยอัตโนมัติ ระบบการจัดการใช้สำหรับสิ่งนี้:
1. แอมพลิจูด;
2. PWM (การจำลองความกว้างพัลส์)
วิธีการควบคุมแอมพลิจูดขึ้นอยู่กับการเปลี่ยนแปลงของแรงดันอินพุต และ PWM ขึ้นอยู่กับอัลกอริทึมสำหรับการสลับทรานซิสเตอร์กำลังที่แรงดันอินพุตคงที่
ด้วยการควบคุม PWM ช่วงเวลาของการมอดูเลตสัญญาณจะถูกสร้างขึ้นเมื่อขดลวดสเตเตอร์เชื่อมต่ออย่างเข้มงวดกับขั้วบวกและขั้วลบของวงจรเรียงกระแส
เนื่องจากความถี่สัญญาณนาฬิกาของเครื่องกำเนิดไฟฟ้าค่อนข้างสูง จากนั้นในขดลวดของมอเตอร์ไฟฟ้าซึ่งมีความต้านทานแบบเหนี่ยวนำ พวกมันจะถูกทำให้เรียบเป็นคลื่นไซน์ปกติ
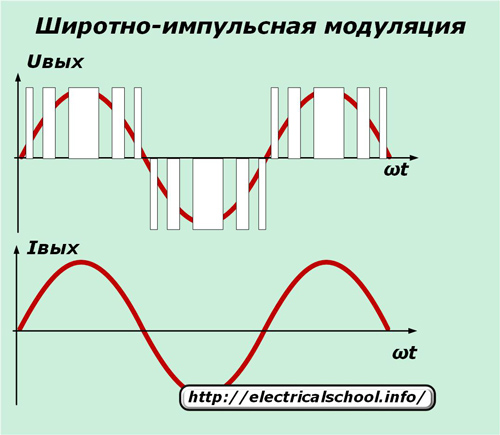
วิธีการควบคุม PWM กำจัดการสูญเสียพลังงานได้สูงสุด และให้ประสิทธิภาพการแปลงสูงเนื่องจากการควบคุมความถี่และแอมพลิจูดพร้อมกัน มีวางจำหน่ายแล้วเนื่องจากการพัฒนาเทคโนโลยีการควบคุมไทริสเตอร์แบบล็อคด้วยพลังงาน GTO ซีรีส์หรือแบรนด์ไบโพลาร์ของทรานซิสเตอร์ IGBT แบบเกทแบบมีฉนวน
หลักการรวมการควบคุมมอเตอร์สามเฟสแสดงอยู่ในรูปภาพ
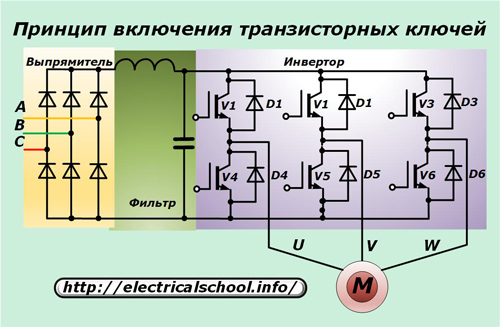
IGBT แต่ละตัวในหกตัวเชื่อมต่อในวงจรตรงข้ามขนานกับไดโอดกระแสย้อนกลับของมันเอง ในกรณีนี้ กระแสแอคทีฟของมอเตอร์เหนี่ยวนำจะผ่านวงจรไฟฟ้าของทรานซิสเตอร์แต่ละตัว และส่วนประกอบปฏิกิริยาของมันจะถูกส่งผ่านไดโอด
เพื่อขจัดอิทธิพลของสัญญาณรบกวนทางไฟฟ้าภายนอกที่มีต่อการทำงานของอินเวอร์เตอร์และมอเตอร์ วงจรของตัวแปลงความถี่สามารถรวม ตัวกรองลดเสียงรบกวนการชำระบัญชี:
-
การรบกวนทางวิทยุ
-
การปล่อยกระแสไฟฟ้าที่เกิดจากอุปกรณ์การทำงาน
สิ่งเหล่านี้ส่งสัญญาณโดยคอนโทรลเลอร์และใช้สายไฟที่มีฉนวนป้องกันระหว่างมอเตอร์และขั้วเอาต์พุตของอินเวอร์เตอร์เพื่อลดการกระแทก
เพื่อปรับปรุงความแม่นยำของการทำงานของมอเตอร์แบบอะซิงโครนัส วงจรควบคุมของตัวแปลงความถี่ประกอบด้วย:
-
อินพุตการสื่อสารพร้อมความสามารถในการเชื่อมต่อขั้นสูง
-
ตัวควบคุมในตัว
-
การ์ดหน่วยความจำ;
-
ซอฟต์แวร์;
-
จอแสดงผล LED ที่ให้ข้อมูลแสดงพารามิเตอร์เอาต์พุตหลัก
-
ตัวสับเบรกและตัวกรอง EMC ในตัว
-
ระบบระบายความร้อนของวงจรขึ้นอยู่กับการเป่าด้วยพัดลมของทรัพยากรที่เพิ่มขึ้น
-
ฟังก์ชั่นการทำความร้อนเครื่องยนต์ด้วยกระแสตรงและความเป็นไปได้อื่น ๆ
ไดอะแกรมการเดินสายการทำงาน
ตัวแปลงความถี่ได้รับการออกแบบมาเพื่อทำงานกับเครือข่ายเฟสเดียวหรือสามเฟส อย่างไรก็ตามหากมีแหล่งอุตสาหกรรมกระแสตรงที่มีแรงดันไฟฟ้า 220 โวลต์ก็สามารถใช้พลังงานจากอินเวอร์เตอร์ได้

รุ่นสามเฟสได้รับการออกแบบมาสำหรับแรงดันไฟหลัก 380 โวลต์และป้อนให้กับมอเตอร์ไฟฟ้า อินเวอร์เตอร์เฟสเดียวใช้พลังงาน 220 โวลต์และจ่ายเอาต์พุตสามเฟสตามช่วงเวลา
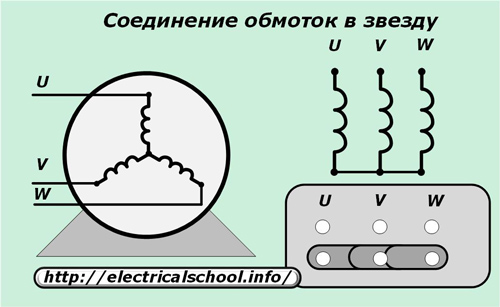
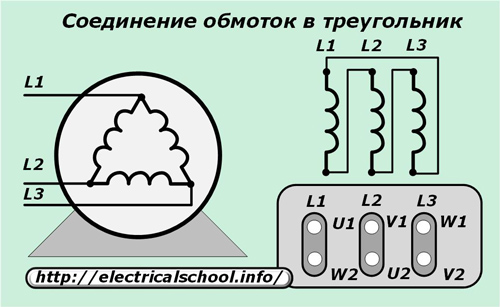
โครงร่างการเชื่อมต่อของตัวแปลงความถี่เข้ากับมอเตอร์สามารถดำเนินการได้ตามโครงร่าง:
-
ดาว;
-
สามเหลี่ยม.
ขดลวดของมอเตอร์ประกอบเป็น "ดาว" สำหรับตัวแปลงที่ป้อนโดยเครือข่ายสามเฟส 380 โวลต์
ตามรูปแบบ "เดลต้า" ขดลวดมอเตอร์จะประกอบขึ้นเมื่อตัวแปลงไฟฟ้าเชื่อมต่อกับเครือข่าย 220 โวลต์เฟสเดียว
เมื่อเลือกวิธีการเชื่อมต่อมอเตอร์ไฟฟ้าเข้ากับตัวแปลงความถี่ คุณต้องใส่ใจกับอัตราส่วนกำลังที่มอเตอร์กำลังทำงานอยู่สามารถสร้างได้ในทุกโหมด รวมถึงการสตาร์ทที่โหลดช้าด้วยความสามารถของอินเวอร์เตอร์
เป็นไปไม่ได้ที่จะโอเวอร์โหลดตัวแปลงความถี่อย่างต่อเนื่อง และพลังงานสำรองเพียงเล็กน้อยจะช่วยให้มั่นใจได้ถึงการทำงานในระยะยาวและปราศจากปัญหา