การเลือกมอเตอร์ไฟฟ้าแบบอะซิงโครนัสสำหรับการทำงานในโหมดการเบรกแบบไดนามิกด้วยการกระตุ้นตัวเอง
 มอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่มีโรเตอร์แบบพันด้วยรูปแบบการควบคุมที่ง่ายที่สุด — การรวมความต้านทานในวงจรโรเตอร์มีคุณสมบัติการควบคุมที่ต่ำมาก ดังนั้นก่อนที่จะมีตัวแปลงความถี่ในตลาด โครงร่างต่างๆ จึงได้รับการพัฒนาเพื่อให้ได้ความเร็วที่ลดลงในโหมดลดระดับ
มอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่มีโรเตอร์แบบพันด้วยรูปแบบการควบคุมที่ง่ายที่สุด — การรวมความต้านทานในวงจรโรเตอร์มีคุณสมบัติการควบคุมที่ต่ำมาก ดังนั้นก่อนที่จะมีตัวแปลงความถี่ในตลาด โครงร่างต่างๆ จึงได้รับการพัฒนาเพื่อให้ได้ความเร็วที่ลดลงในโหมดลดระดับ
จริงๆแล้วมีไม่มากนัก ในต่างประเทศ การใช้เครื่องจักรไฟฟ้าเพิ่มเติม—เบรกกระแสน้ำวนที่ติดตั้งบนเพลาเดียวกับเครื่องยนต์หลัก—เริ่มแพร่หลาย โครงร่างช่วยให้คุณได้รับคุณสมบัติทางกลที่เข้มงวดเพียงพอเมื่อลดภาระ แต่ไดรฟ์ไฟฟ้าดังกล่าวมีลักษณะพลังงานต่ำมาก (พลังงานเบรกถูกปล่อยออกมาในเบรกกระแสน้ำวน) นอกจากนี้เบรกกระแสน้ำวนยังมีราคาค่อนข้างสูงและทำให้เค้าโครงของชิ้นส่วนเชิงกลซับซ้อนขึ้นอย่างมาก
ดังนั้น เพื่อให้ได้ความเร็วในการลงจอดในกลไกการยกที่ใช้มอเตอร์แบบอะซิงโครนัสกับเฟสโรเตอร์ที่โรงงานไดนาโมในปลายปี 1970 ทีมออกแบบที่นำโดย E.M. Pevzner แนะนำการเบรกแบบไดนามิกที่ตื่นเต้นในตัวเอง
ไดรฟ์ไฟฟ้าดังกล่าวใช้กันอย่างแพร่หลายในเครนในประเทศ (แผงประเภท TSD, TSDI, KSDB สำหรับสะพาน, โครงสำหรับตั้งสิ่งของและโครงสำหรับตั้งสิ่งของ, แผงควบคุมสำหรับทาวเวอร์เครน KB-309, KB-403, KB-404, KB-405, KB - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.) เรากำลังพูดถึงเครนหลายหมื่นตัวที่ใช้งานอยู่
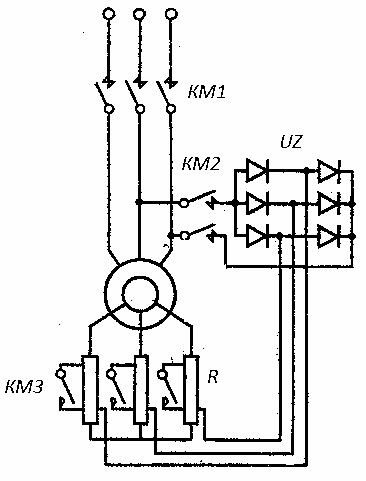
ข้าว. 1. โครงการรวมมอเตอร์แบบอะซิงโครนัสในโหมดเบรกแบบไดนามิกโดยการกระตุ้นตัวเอง
หลักการของการเบรกแบบไดนามิกพร้อมการกระตุ้นตัวเองมีดังนี้:
วงจรโรเตอร์ประกอบด้วย วงจรเรียงกระแสสามเฟส UZ (รูปที่ 1) มอเตอร์ไฟฟ้าถูกตัดการเชื่อมต่อจากเครือข่ายผ่านคอนแทค KM1 แรงดันไฟฟ้าที่แก้ไขแล้วเชื่อมต่อกับสเตเตอร์ที่คดเคี้ยวผ่านคอนแทค KM2 คอนแทคคอนแทค KM3 ปิดอยู่ เมื่อปล่อยเบรก (ไม่แสดงในแผนภาพ) เพลามอเตอร์จะเริ่มหมุนภายใต้แรงกระทำของน้ำหนักที่ตกลงมา
EMF ถูกเหนี่ยวนำในขดลวดของโรเตอร์ ภายใต้อิทธิพลของกระแสที่เริ่มไหลในวงจรโรเตอร์-สเตเตอร์ มอเตอร์พัฒนาแรงบิดในการเบรก โหลดจะลดลงด้วยความเร็วคงที่ ค่าความเร็วถูกกำหนดโดยค่าความต้านทานของวงจรโรเตอร์ ยิ่งมีแรงต้านมากเท่าไหร่ อัตราการตกก็จะยิ่งเร็วขึ้นเท่านั้น เพื่อเพิ่มความเร็ว คอนแทค KM3 ถูกปิด
ในโหมดการเบรกแบบไดนามิกกระตุ้นตัวเอง ไดรฟ์ไฟฟ้าจะใช้พลังงานจากเครือข่ายเพื่อจ่ายไฟให้กับอุปกรณ์ดันไฮดรอลิกเบรกและอุปกรณ์หน้าสัมผัสรีเลย์เท่านั้น ดังตัวอย่าง รูปที่ 7 แสดงคุณสมบัติทางกลของไดรฟ์ไฟฟ้าพร้อมแผง TSD
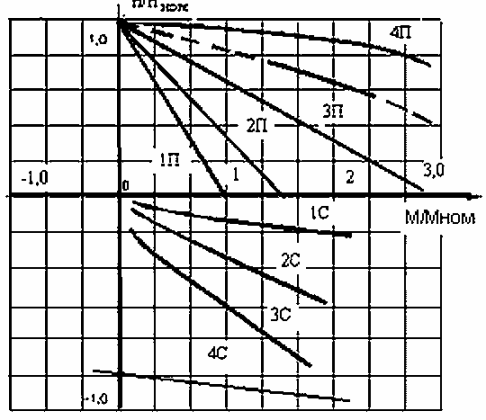
ข้าว. 2. ลักษณะทางกลของไดรฟ์ไฟฟ้าของกลไกการยกด้วยแผง TSD
ลักษณะการเบรกแบบไดนามิกกำหนดเป็น 1C, 2C, 3C จะเห็นได้ว่าลักษณะมีความแข็งพอสมควร การปรับความเร็วจะดำเนินการในช่วง 1: 8 ซึ่งในกรณีส่วนใหญ่จะเพียงพอสำหรับ faucets จำนวนมาก
เงื่อนไขสำหรับการกระตุ้นตัวเองของมอเตอร์ไฟฟ้าคือ:
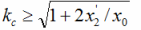
โดยที่ x '2- ความต้านทานอุปนัยของขดลวดโรเตอร์, โอห์ม; хо- ความต้านทานอุปนัยของวงจรแม่เหล็ก โอม
โดยที่ ks คือค่าสัมประสิทธิ์ของโครงร่าง
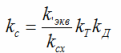
kd — ค่าสัมประสิทธิ์การลดลงของกระแสโรเตอร์เป็นกระแสสเตเตอร์ kcx — ค่าสัมประสิทธิ์วงจรแก้ไขสำหรับวงจรบริดจ์สามเฟส kx = 0.85; kt คือค่าสัมประสิทธิ์การแปลงของมอเตอร์จากสเตเตอร์เป็นโรเตอร์
ค่าสัมประสิทธิ์ kd ขึ้นอยู่กับรูปแบบการเชื่อมต่อของขดลวดสเตเตอร์ซึ่งเชื่อมต่อกับดาวในมอเตอร์ faucet ในครัวเรือนที่แรงดันไฟหลัก 380 V
ค่าสัมประสิทธิ์ kt ขึ้นอยู่กับค่าสัมประสิทธิ์การแปลงเช่น ของอัตราส่วนของแรงดันสเตเตอร์ต่อแรงดันโรเตอร์ ซึ่งขึ้นอยู่กับชนิดของมอเตอร์ ตัวอย่างเช่น สำหรับมอเตอร์ไฟฟ้าหลายรุ่นของซีรีส์ MT และ 4MT ค่าและพารามิเตอร์ที่เกี่ยวข้องจะถูกจัดตาราง 1.
ตารางที่ 1.
ประเภทมอเตอร์ไฟฟ้า กำลัง, kWt แรงดันโรเตอร์, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1.5 1.3 0.173 3.74 1.04 4MTN225L6 55 290 1.31 1.31 0.197 3.73 1.05 MTN512- 6 55 340 1.11 0.98 0.197 3.8 1.05 4MTN280L10 75 308 1.23 1.06 0.146 2.33 1.06 4MTN280M6 110 420 0. 9 0.7 0.083 2.98 1.02
เงื่อนไข кс ≥ √(1 + 2x '2/hо) ดำเนินการสำหรับเครื่องยนต์ประเภท MTN412-6, 4MTN225L6 ซึ่งสามารถเรียกว่า "ตื่นเต้น" มอเตอร์ไฟฟ้าดังกล่าวเข้าสู่โหมดกระตุ้นตัวเองโดยไม่ต้องตัดสินใจวงจรเพิ่มเติม อย่างไรก็ตาม ในอุปกรณ์สมบูรณ์แรงดันต่ำ (สวิตช์เกียร์หรือแผงควบคุมแรงดันต่ำ) ที่ออกแบบมาเพื่อทำงานร่วมกับมอเตอร์ดังกล่าว จะมีการกระตุ้นเริ่มต้นเพียงเล็กน้อยเพื่อการทำงานที่เชื่อถือได้
การกระตุ้นเริ่มต้นดำเนินการโดยผ่านค่าคงที่ที่เรียกว่า ค่าเล็กน้อยของ "กระแสจ่าย" (ปกติไม่เกิน 10% ของกระแสที่กำหนดของมอเตอร์) จากวงจรเรียงกระแสแบบครึ่งคลื่น สำหรับมอเตอร์แบบตื่นเต้น ไม่ว่าในกรณีใด การทำเช่นนี้ก็เพียงพอแล้วสำหรับการเปลี่ยนไปใช้โหมดการเบรกแบบไดนามิกที่กระตุ้นตัวเองได้อย่างน่าเชื่อถือ
มอเตอร์ไฟฟ้า MTN512-6, 4MTN280M6 ซึ่งไม่เป็นไปตามเงื่อนไข кс ≥ √(1 + 2х '2/хо) จะ "ไม่ตื่นเต้น" นี่ไม่ได้หมายความว่ามอเตอร์ดังกล่าวไม่สามารถทำงานในโหมดเบรกแบบไดนามิกด้วยการกระตุ้นตัวเอง แต่ค่าของกระแสเพิ่มเติมที่จำเป็นสำหรับพวกมันถึง 50% ของกระแสที่กำหนดของสเตเตอร์สิ่งนี้จำเป็นต้องใช้ NKU พิเศษ (แผงควบคุม) สำหรับมอเตอร์ไฟฟ้าที่ไม่ตื่นเต้น …
มอเตอร์ไฟฟ้าประเภท 4MTN280L10 ที่มี кс = √(1 + 2x '2/хо) อยู่ที่ขีดจำกัดของการกระตุ้นตัวเอง และการเปลี่ยนแปลงแบบสุ่มใดๆ ในพารามิเตอร์สามารถฝ่าฝืนเงื่อนไขการกระตุ้นตัวเองได้ ดังนั้นมอเตอร์ดังกล่าวจึงสามารถจัดได้ว่าไม่ตื่นเต้น
ตัวแปรหลักที่ส่งผลต่อความสามารถของมอเตอร์ไฟฟ้าในการกระตุ้นตัวเองคือแรงดันไฟฟ้าที่กำหนดของโรเตอร์ E2nom ค่าวิกฤตของ E2nom ซึ่งการกระตุ้นตัวเองจะไม่เกิดขึ้นหากไม่มีกระแสไฟจำนวนมาก ควรมีค่าเป็น 300 V
คุณลักษณะของโหมดเบรกไดนามิกกระตุ้นตัวเองนี้ได้รับการพิจารณาโดยโรงงาน Dynamo และ Sibelektromotor PO เมื่อพัฒนาชุดมอเตอร์ไฟฟ้าเครน 4MT ในช่วงต้นทศวรรษ 1980
โดยเฉพาะอย่างยิ่ง ค่า E2nom สำหรับมอเตอร์ไฟฟ้าบางตัวได้ลดลงเมื่อเทียบกับซีรีย์ MT ก่อนหน้าเพื่อให้มอเตอร์มีความตื่นเต้น
ตัวอย่างเช่น สำหรับมอเตอร์ไฟฟ้า 4MTN225L6 ซึ่งใช้กันอย่างแพร่หลายในไดรฟ์ไฟฟ้าของทาวเวอร์เครน E2nom ลดลงเมื่อเทียบกับมอเตอร์ซีรีส์ MTN512-6 รุ่นก่อนหน้าจาก 340 เป็น 290 V ซึ่งทำให้มอเตอร์ตื่นเต้นในตัวเอง ต่อมา OJSC "Sibelectromotor" เริ่มผลิตมอเตอร์ไฟฟ้า 4MTM225L6 ด้วยพารามิเตอร์เดียวกัน
เมื่อเวลาผ่านไป ผู้ผลิตรายอื่นก็เริ่มผลิตมอเตอร์ไฟฟ้าที่มีจุดประสงค์คล้ายกัน
โรงงานก่อสร้างเครน Rzhevsky ผลิตมอเตอร์ไฟฟ้า MKAF225L6 บริษัท Siberian Electrotechnical ผลิตมอเตอร์ไฟฟ้า 4MTM225L6 PNDแม้จะมีลักษณะที่แตกต่างจากต้นแบบที่เกี่ยวข้องกับความสามารถทางเทคโนโลยีของผู้ผลิตแต่ละราย แต่มอเตอร์ไฟฟ้าทั้งหมดเหล่านี้มีพารามิเตอร์ทางไฟฟ้าและขนาดการติดตั้งที่เหมือนกันและสามารถใช้แทนกันได้อย่างสมบูรณ์
ความแตกต่างในชื่อของเครื่องยนต์ทำให้ผู้ใช้สามารถเลือกผู้ผลิตรายใดรายหนึ่งหรือรายอื่นได้อย่างมีข้อมูล ตามความชอบ ราคา เวลาการส่งมอบ ฯลฯ และในขณะเดียวกัน ต้องแน่ใจว่าการเปลี่ยนมอเตอร์ไฟฟ้าของผู้ผลิต faucet รายหนึ่งเป็นมอเตอร์ไฟฟ้าของผู้ผลิตรายอื่นจะไม่ทำให้ faucet ทำงานผิดปกติหรือเกิดอุบัติเหตุ
อย่างไรก็ตามในทศวรรษที่ผ่านมามอเตอร์ไฟฟ้าจากผู้ผลิตหลายรายได้ปรากฏตัวในตลาดภายในประเทศซึ่งเป็นแบรนด์ที่จำลองแบรนด์ของมอเตอร์ไฟฟ้า "ดั้งเดิม" ที่ผลิตโดย JSC "Sibelectromotor" สามารถสันนิษฐานได้ว่าต้นกำเนิดของมอเตอร์ไฟฟ้านั้นเชื่อมโยงกับเพื่อนบ้านทางตะวันออกของประเทศของเรา ราคาของพวกเขาต่ำกว่าของผู้ผลิตแบบดั้งเดิมเล็กน้อยดังนั้นจึงเป็นที่เข้าใจได้ว่าความสนใจในพวกเขาจากวัสดุสิ้นเปลืองขององค์กร
ดังนั้นเมื่อสั่งซื้อมอเตอร์ไฟฟ้าเพื่อติดตั้งบนเครนที่ผลิตขึ้นหรือเปลี่ยนมอเตอร์ไฟฟ้าที่เสียหายบนเครนด้วยมอเตอร์ที่ใช้งานได้ คุณจะได้มอเตอร์ไฟฟ้าของผู้ผลิตที่ไม่รู้จัก โดยที่ E2nom แตกต่างจากมอเตอร์ไฟฟ้าต้นแบบ
สถานการณ์ค่อนข้างชวนให้นึกถึงช่วงต้นทศวรรษที่ 90 เมื่อวงดนตรีป๊อปหลายวงที่มีชื่อเดียวกันออกทัวร์ทั่วประเทศในเวลาเดียวกัน
ขอให้เราจำอีกครั้งว่าอัตราส่วน E2nom / I2nom เป็นพารามิเตอร์ที่สำคัญที่สุดของมอเตอร์ที่มีโรเตอร์แบบพัน ซึ่งส่งผลต่อการเลือกตัวต้านทานสตาร์ท อุปกรณ์รีเลย์คอนแทค และดังที่กล่าวไว้ข้างต้น เงื่อนไขการกระตุ้นตัวเองของ มอเตอร์ไฟฟ้า.
อย่างไรก็ตาม บ่อยครั้งที่ไม่มีข้อมูลโรเตอร์เลยบนแผ่นป้ายของเครื่องยนต์ที่ลอกแบบมา นี่คือตัวอย่าง:
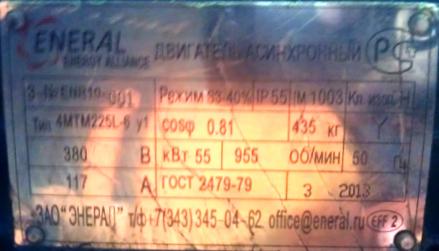
ข้าว. 3. ป้ายชื่อมอเตอร์แบบอะซิงโครนัสของโรเตอร์เครน
โดยวิธีการที่มอเตอร์ไฟฟ้านี้มีค่า E2nom «ถูกต้อง» แต่ตอนนี้ต้องพิจารณาเชิงประจักษ์เท่านั้น
ในแคตตาล็อกของผู้ผลิตรายอื่นสำหรับมอเตอร์ไฟฟ้า 4MTM225L6 มีการระบุค่า E2nom = 340 V เช่น เครื่องยนต์ที่ตื่นเต้นกลายเป็นเครื่องยนต์ที่ไม่ตื่นเต้น ผลที่ตามมาของการใช้มอเตอร์ไฟฟ้าดังกล่าวเป็นส่วนหนึ่งของไดรฟ์ไฟฟ้าที่มีการเบรกแบบไดนามิกพร้อมการกระตุ้นตัวเองคือการลดลงของโหลดและการแยกตัวของมอเตอร์ไฟฟ้าด้วยการทำลายเชิงกลของโรเตอร์และขดลวดสเตเตอร์
มันเป็นภาพนี้ที่ผู้เขียนสังเกตเห็นเมื่อเร็ว ๆ นี้ในหนึ่งในองค์กรสร้างเครื่องจักรที่เก่าแก่ที่สุดของรัสเซียซึ่งมีการส่งมอบสะพานเครนใหม่พร้อมมอเตอร์ไฟฟ้าแบบโคลนประเภท 4MTM225L6 พร้อม E2n = 340 V โชคดีเท่านั้นที่ผู้คนไม่ได้ทำ ทุกข์ทรมาน. นอกจากนี้ เจ้าของเครนยังคืนเครื่องยนต์สามครั้ง (!) หลังจากหักหลบ
ผู้ผลิตมอเตอร์ไฟฟ้าแบบโคลนอีกรายซึ่งประสบอุบัติเหตุคล้าย ๆ กันซ้ำ ๆ ตอนนี้ผลิตมอเตอร์ไฟฟ้าสองตัวภายใต้แบรนด์เดียวกัน (!) หนึ่งอันที่มี E2nom = 340 V ส่วนอีกอันที่มี E2nom = 264 V ระบุไว้ในแคตตาล็อกพร้อมหมายเหตุ: "สำหรับก๊อกประเภท KB" เช่น ทาวเวอร์เครน
มอเตอร์ดังกล่าวใช้กันอย่างแพร่หลายในทาวเวอร์เครน แต่ก็มีการติดตั้งบนเครนสะพานด้วย คุณจึงได้ยินบทสนทนาระหว่างซัพพลายเออร์และลูกค้า: “คุณต้องการมอเตอร์สำหรับเครนอะไร สำหรับพื้น. จากนั้นใช้อันนี้ (E2nom = 340 V) » และในการขับเคลื่อนรอกไฟฟ้ามีแผงควบคุมพร้อมเบรกไดนามิกที่ตื่นเต้นในตัวเอง ผลลัพธ์ที่ได้อธิบายไว้ข้างต้น
ในขณะเดียวกันก็ไม่มีใครบอกว่ามอเตอร์ไฟฟ้าเหล่านี้มีข้อบกพร่องหรือไม่น่าเชื่อถือและไม่สามารถใช้กับเครนได้ ยิ่งมีตัวเลือกในตลาดมากเท่าไหร่ก็ยิ่งดีเท่านั้น ดังที่พวกเขากล่าวว่ามีเครื่องยนต์ที่ดีและแตกต่างกันมากขึ้น เป็นเพียงการที่แบรนด์ของพวกเขาทำให้ผู้บริโภคเข้าใจผิดซึ่งอาจเต็มไปด้วยผลที่ตามมาที่เป็นอันตราย
ในการใช้มอเตอร์ไฟฟ้ากับพารามิเตอร์ของโรเตอร์นอกเหนือจากต้นแบบ คุณต้อง:
-
วัด E2nom เมื่อวงจรโรเตอร์เปิดอยู่และขดลวดสเตเตอร์เชื่อมต่อกับกริด
-
ขึ้นอยู่กับการวัด E2nom คำนวณ เลือก และสั่งซื้อตัวต้านทานแบบบัลลาสต์
-
เลือกแผงควบคุมสำหรับมอเตอร์ไฟฟ้าที่ไม่มีการกระตุ้นจากแคตตาล็อกและสั่งซื้อ
หรือคุณสามารถถามเกี่ยวกับมูลค่าของ E2nom ก่อนสั่งซื้อเครื่องยนต์ที่ดึงดูดด้วยราคาและตกลงโดยเฉพาะในสัญญา อย่างไรก็ตาม สิ่งนี้ไม่ได้ตัดทอนการวัด E2nom ระหว่างการควบคุมอินพุตของมอเตอร์ที่สั่ง
สรุปข้างต้นเราสามารถสรุปได้ดังต่อไปนี้:
-
ในไดรฟ์ไฟฟ้าของ faucets ในครัวเรือนที่ใช้มอเตอร์ไฟฟ้าของเฟสโรเตอร์นั้นมีการใช้การเบรกแบบไดนามิกที่ตื่นเต้นในตัวเองอย่างกว้างขวาง ไดรฟ์ไฟฟ้าหลายหมื่นตัวกำลังทำงานอยู่ พวกเขายังคงได้รับการออก
-
ในการทำงานในโหมดเบรกแบบไดนามิกที่ตื่นเต้นในตัวเอง มอเตอร์ไฟฟ้าต้องมีอัตราส่วน E2nom / I2nom ที่แน่นอน
-
เงื่อนไขหลักสำหรับการกระตุ้นตัวเองของมอเตอร์ไฟฟ้าที่มีโรเตอร์โรเตอร์คือค่า E2nom ≤ 300 V
-
การใช้มอเตอร์ไฟฟ้าที่มี E2nom > 300 V พร้อมแผงควบคุมที่ออกแบบมาสำหรับมอเตอร์ไฟฟ้าแบบตื่นเต้นอาจทำให้โหลดลดลงและทำลายมอเตอร์ไฟฟ้าได้