เซ็นเซอร์โพเทนชิโอเมตริก
เซ็นเซอร์โพเทนชิออมิเตอร์คือตัวต้านทานแบบปรับค่าได้ที่ใช้จ่ายแรงดัน ค่าอินพุตคือการกระจัดเชิงเส้นหรือเชิงมุมของหน้าสัมผัสที่รวบรวมกระแส และค่าเอาต์พุตคือแรงดันที่ได้รับจากหน้าสัมผัสนี้ ซึ่งเปลี่ยนขนาดตามตำแหน่ง การเปลี่ยนแปลง
เซ็นเซอร์โพเทนชิโอเมตริกได้รับการออกแบบมาเพื่อแปลงการกระจัดเชิงเส้นหรือเชิงมุมเป็นสัญญาณไฟฟ้า รวมทั้งสร้างการพึ่งพาการทำงานที่ง่ายที่สุดในอุปกรณ์อัตโนมัติและอัตโนมัติประเภทต่อเนื่อง
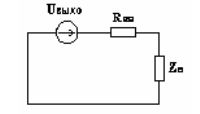
 แผนภาพการเชื่อมต่อเซ็นเซอร์โพเทนชิโอเมตริก
แผนภาพการเชื่อมต่อเซ็นเซอร์โพเทนชิโอเมตริก
ตามความต้านทาน เซ็นเซอร์โพเทนชิโอเมตริกจะแบ่งออกเป็น
-
แผ่นที่มีความต้านทานคงที่
-
ขดลวดที่มีขดลวดต่อเนื่อง
-
ด้วยชั้นตัวต้านทาน

เซ็นเซอร์โพเทนชิโอเมตริกแบบลาเมลลาร์ถูกนำมาใช้เพื่อทำการวัดที่ค่อนข้างหยาบเนื่องจากข้อบกพร่องด้านการออกแบบบางประการ
ในเซ็นเซอร์ดังกล่าว ตัวต้านทานค่าคงที่ซึ่งเลือกชื่อในลักษณะพิเศษจะถูกบัดกรีเข้ากับแผ่นลาเมลลา
แผ่นลาเมลลาเป็นโครงสร้างที่มีองค์ประกอบนำไฟฟ้าและไม่นำไฟฟ้าสลับกันซึ่งแผ่นสไลด์สัมผัสกับตัวสะสมเมื่อตัวรวบรวมกระแสถูกย้ายจากองค์ประกอบตัวนำหนึ่งไปยังอีกองค์ประกอบหนึ่ง ความต้านทานรวมของตัวต้านทานที่เชื่อมต่อกับมันจะเปลี่ยนตามจำนวนที่สอดคล้องกับค่าเล็กน้อยของความต้านทานหนึ่งตัว การเปลี่ยนแปลงของแนวต้านสามารถเกิดขึ้นได้ในวงกว้าง ข้อผิดพลาดในการวัดจะพิจารณาจากขนาดของหน้าสัมผัส
เซ็นเซอร์โพเทนชิโอมิเตอร์แบบลาเมลลาร์
เซ็นเซอร์โพเทนชิออมิเตอร์แบบลวดได้รับการออกแบบมาสำหรับการวัดที่แม่นยำยิ่งขึ้น ตามกฎแล้วการออกแบบของพวกเขาคือกรอบที่ทำจาก getinax, textolite หรือเซรามิกส์ซึ่งมีลวดเส้นเล็กพันเป็นชั้นเดียวหมุนเป็นวงกลมบนพื้นผิวที่สะอาดซึ่งตัวสะสมปัจจุบันเลื่อน
กำหนดเส้นผ่านศูนย์กลางของเส้นลวด ระดับความแม่นยำ เซ็นเซอร์โพเทนชิออมิเตอร์ (สูง 0.03-0.1 มม. ต่ำ 0.1-0.4 มม.) วัสดุลวด: แมงกานีส, เฟชรัล, โลหะผสมจากโลหะมีตระกูล สลิปริงทำจากวัสดุที่นิ่มกว่าเพื่อป้องกันไม่ให้ลวดถลอก
ข้อดีของเซ็นเซอร์โพเทนชิออมิเตอร์:
-
ความเรียบง่ายของการออกแบบ
-
ขนาดและน้ำหนักที่เล็ก
-
ความเป็นเส้นตรงระดับสูงของลักษณะคงที่
-
ความคงตัวของคุณลักษณะ
-
ความเป็นไปได้ของการทำงานกับกระแสสลับและกระแสตรง
ข้อเสียของเซ็นเซอร์โพเทนชิออมิเตอร์:
-
การปรากฏตัวของหน้าสัมผัสแบบเลื่อนซึ่งอาจทำให้เกิดความเสียหายเนื่องจากการเกิดออกซิเดชันของร่องรอยการสัมผัส การถูของการหมุนหรือการดัดของตัวเลื่อน
-
ข้อผิดพลาดในการทำงานเนื่องจากการโหลด
-
ปัจจัยการแปลงที่ค่อนข้างเล็ก
-
เกณฑ์ความไวสูง
-
การปรากฏตัวของเสียงรบกวน;
-
ความไวต่อการสึกกร่อนทางไฟฟ้าภายใต้อิทธิพลของการปล่อยแรงกระตุ้น

ลักษณะคงที่ของเซ็นเซอร์โพเทนชิโอเมตริก
ลักษณะคงที่ของเซ็นเซอร์โพเทนชิโอเมตริกแบบผันกลับไม่ได้
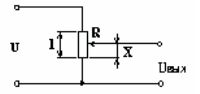
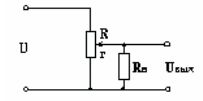
ลองพิจารณาตัวอย่างเซ็นเซอร์โพเทนชิออมิเตอร์ที่มีขดลวดต่อเนื่อง ขั้วโพเทนชิออมิเตอร์ใช้แรงดันไฟ AC หรือ DC U ค่าอินพุตคือดิสเพลสเมนต์ X ค่าเอาต์พุตคือแรงดัน Uout สำหรับโหมดว่าง ลักษณะคงที่ของเซ็นเซอร์จะเป็นเส้นตรงเนื่องจากความสัมพันธ์เป็นจริง: Uout = (U / R) r,
โดยที่ R คือความต้านทานของขดลวด r คือความต้านทานของส่วนหนึ่งของขดลวด
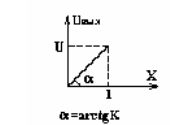
เนื่องจาก r / R = x / l โดยที่ l คือความยาวทั้งหมดของขดลวด เราจะได้ Uout = (U / l) x = Kx [V / m],
โดยที่ K คือค่าสัมประสิทธิ์การแปลง (การส่ง) ของเซ็นเซอร์
เห็นได้ชัดว่าเซ็นเซอร์ดังกล่าวจะไม่ตอบสนองต่อการเปลี่ยนแปลงของสัญญาณอินพุต (เซ็นเซอร์ไม่สามารถย้อนกลับได้) มีแผนการที่ไวต่อการเปลี่ยนแปลงลายเซ็น ลักษณะคงที่ของเซ็นเซอร์ดังกล่าวมีรูปแบบที่แสดงในรูป
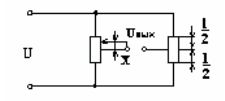
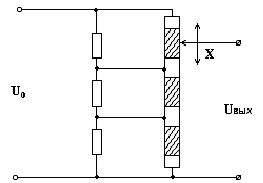
วงจรย้อนกลับของเซ็นเซอร์โพเทนชิออมิเตอร์
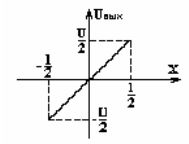
คุณลักษณะคงที่ของเซ็นเซอร์โพเทนชิโอเมตริกแบบผันกลับได้
ลักษณะในอุดมคติที่เกิดขึ้นอาจแตกต่างอย่างมากจากของจริงเนื่องจากมีข้อผิดพลาดประเภทต่างๆ:
1. โซนตาย
แรงดันไฟขาออกจะแตกต่างกันไปในแต่ละรอบ เช่น โซนนี้เกิดขึ้นเมื่อ Uout ไม่เปลี่ยนแปลงสำหรับค่าอินพุตเล็กน้อย
ขนาดของแรงดันไฟฟ้ากระโดดถูกกำหนดโดยสูตร: DU = U / W โดยที่ W คือจำนวนรอบ
เกณฑ์ความไวถูกกำหนดโดยเส้นผ่านศูนย์กลางของขดลวด: Dx = l / W
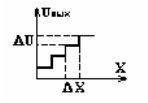
เซ็นเซอร์โพเทนชิโอเมตริกสำหรับเดดแบนด์
2. ความไม่สม่ำเสมอของลักษณะคงที่เนื่องจากความแปรปรวนของเส้นผ่านศูนย์กลางลวด ความต้านทาน และระยะพิทช์ที่คดเคี้ยว
3. ข้อผิดพลาดจากฟันเฟืองที่เกิดขึ้นระหว่างแกนหมุนของมอเตอร์และปลอกนำ (ใช้สปริงอัดเพื่อลดแรงกด)
4.ข้อผิดพลาดเนื่องจากการเสียดสี
ที่พลังงานต่ำขององค์ประกอบที่ขับเคลื่อนแปรงของเซ็นเซอร์โพเทนชิออมิเตอร์ โซนนิ่งอาจเกิดขึ้นเนื่องจากแรงเสียดทาน
ต้องปรับแรงกดแปรงอย่างระมัดระวัง
5. ข้อผิดพลาดเนื่องจากอิทธิพลของโหลด
ข้อผิดพลาดเกิดขึ้นทั้งในโหมดสแตติกและไดนามิกทั้งนี้ขึ้นอยู่กับลักษณะของการโหลด ด้วยโหลดที่ใช้งาน ลักษณะคงที่จะเปลี่ยนไป ค่าแรงดันเอาต์พุตจะถูกกำหนดตามนิพจน์: Uout = (UrRn) / (RRn + Rr-r2)
เหล่านี้. Uout = f (r) ขึ้นอยู่กับ Rn ด้วย Rn >> R จะได้ว่า Uout = (U / R) r;
เมื่อ Rn มีค่าเท่ากับ R โดยประมาณ การพึ่งพาจะไม่เป็นเชิงเส้น และข้อผิดพลาดสูงสุดของเซ็นเซอร์จะเป็นเมื่อตัวเลื่อนเบี่ยงเบนจาก (2/3))l มักจะเลือก Rн / R = 10 … 100 ขนาดของข้อผิดพลาดที่ x = (2/3) l สามารถกำหนดได้ด้วยนิพจน์: E = 4/27η โดยที่ η= Rн / R — โหลดแฟกเตอร์
เซ็นเซอร์โพเทนชิโอเมตริกภายใต้ภาระ
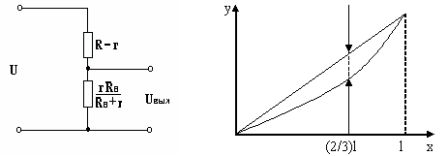 a — วงจรสมมูลของเซนเซอร์โพเทนชิโอเมตริกที่มีโหลด b — อิทธิพลของโหลดที่มีต่อคุณลักษณะทางสถิตของเซนเซอร์โพเทนชิโอเมตริก
a — วงจรสมมูลของเซนเซอร์โพเทนชิโอเมตริกที่มีโหลด b — อิทธิพลของโหลดที่มีต่อคุณลักษณะทางสถิตของเซนเซอร์โพเทนชิโอเมตริก
ลักษณะไดนามิกของเซ็นเซอร์โพเทนชิโอเมตริก
ฟังก์ชั่นการส่ง
เพื่อให้ได้ฟังก์ชั่นการถ่ายโอนจะสะดวกกว่าที่จะใช้กระแสโหลดเป็นค่าเอาต์พุต สามารถกำหนดได้โดยใช้ทฤษฎีบทเครื่องกำเนิดสมมูล B = Uout0 / (Rvn + สังกะสี)
พิจารณาสองกรณี:
1. โหลดเป็น Zn = Rn ที่แอ็คทีฟล้วนๆ เนื่องจาก Uout0 = K1x In = K1x / (Rin + Rn)
โดยที่ K1 คือความเร็วรอบเดินเบาของเซ็นเซอร์
การใช้การแปลง Laplace เราได้รับฟังก์ชันการถ่ายโอน W (p) = In (p) / X (p) = K1 / (Rin + Rn) = K
ด้วยวิธีนี้ เราได้รับการเชื่อมต่อที่ไม่เฉื่อย ซึ่งหมายความว่าเซ็นเซอร์มีลักษณะความถี่และเวลาทั้งหมดที่สอดคล้องกับการเชื่อมต่อนี้
วงจรสมมูล
2. โหลดอุปนัยพร้อมส่วนประกอบที่ใช้งานอยู่
U = RvnIn + L (dIn / dt) + RnIn
การใช้การแปลง Laplace เราได้รับ Uoutx (p) = In (p) [(Rvn + pL) + Rn]
ผ่านการแปลง เราสามารถมาถึงฟังก์ชันการถ่ายโอนของแบบฟอร์ม W (p) = K / (Tp + 1) — การเชื่อมต่อแบบ aperiodic ของลำดับที่ 1
โดยที่ K = K1 / (Rvn + Rn)
T = L / (Rvn + Rn);
เสียงภายในของเซ็นเซอร์โพเทนชิออมิเตอร์
 ดังที่แสดงไว้ เมื่อแปรงเคลื่อนที่จากจุดหนึ่งไปอีกจุดหนึ่ง แรงดันเอาต์พุตจะเปลี่ยนแปลงอย่างกะทันหัน ข้อผิดพลาดที่เกิดจากการก้าวจะอยู่ในรูปของแรงดันฟันเลื่อยที่ซ้อนทับกับแรงดันเอาต์พุตของฟังก์ชันการถ่ายโอน เช่น เป็นเสียงรบกวน หากแปรงสั่น การเคลื่อนไหวจะทำให้เกิดเสียงรบกวน (สัญญาณรบกวน) สเปกตรัมความถี่ของเสียงสั่นสะเทือนอยู่ในช่วงความถี่เสียง
ดังที่แสดงไว้ เมื่อแปรงเคลื่อนที่จากจุดหนึ่งไปอีกจุดหนึ่ง แรงดันเอาต์พุตจะเปลี่ยนแปลงอย่างกะทันหัน ข้อผิดพลาดที่เกิดจากการก้าวจะอยู่ในรูปของแรงดันฟันเลื่อยที่ซ้อนทับกับแรงดันเอาต์พุตของฟังก์ชันการถ่ายโอน เช่น เป็นเสียงรบกวน หากแปรงสั่น การเคลื่อนไหวจะทำให้เกิดเสียงรบกวน (สัญญาณรบกวน) สเปกตรัมความถี่ของเสียงสั่นสะเทือนอยู่ในช่วงความถี่เสียง
เพื่อขจัดการสั่นสะเทือน สำเนาจะทำจากลวดหลายเส้นที่มีความยาวต่างกันมาพับเข้าด้วยกัน จากนั้นความถี่ธรรมชาติของสายแต่ละเส้นจะแตกต่างกัน ซึ่งจะป้องกันไม่ให้เกิดเสียงสะท้อนทางเทคนิค ระดับเสียงรบกวนจากความร้อนต่ำ โดยจะนำมาพิจารณาในระบบที่มีความละเอียดอ่อนเป็นพิเศษ
เซ็นเซอร์โพเทนชิโอเมตริกที่ใช้งานได้
ควรสังเกตว่าใน automation functional transfer functions มักใช้เพื่อรับ nonlinear dependencies พวกมันถูกสร้างขึ้นในสามวิธี:
-
การเปลี่ยนเส้นผ่านศูนย์กลางของเส้นลวดตามขดลวด
-
การเปลี่ยนระยะห่างของคอยล์
-
การใช้เฟรมที่มีการกำหนดค่าบางอย่าง
-
โดยการหลบหลีกส่วนของโพเทนชิออมิเตอร์เชิงเส้นที่มีความต้านทานขนาดต่างกัน
ตัวอย่างเช่น เพื่อให้ได้การพึ่งพากำลังสองตามวิธีที่สาม จำเป็นต้องเปลี่ยนความกว้างของกรอบเชิงเส้น ดังแสดงในรูป
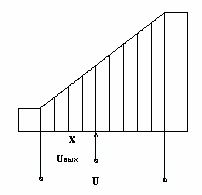
เซ็นเซอร์โพเทนชิออมิเตอร์ที่ใช้งานได้
โพเทนชิโอมิเตอร์แบบมัลติเทิร์น
เซ็นเซอร์โพเทนชิออมิเตอร์ทั่วไปมีช่วงการทำงานจำกัด ค่าของมันถูกกำหนดโดยขนาดทางเรขาคณิตของเฟรมและจำนวนรอบของขดลวด พวกเขาไม่สามารถเพิ่มขึ้นอย่างไม่มีกำหนด ดังนั้น เซ็นเซอร์โพเทนชิออมิเตอร์แบบหลายรอบจึงพบการใช้งาน ซึ่งองค์ประกอบตัวต้านทานบิดเป็นเกลียวหลายรอบ แกนของพวกมันจะต้องหมุนหลาย ๆ ครั้งเพื่อให้มอเตอร์เคลื่อนที่จากปลายด้านหนึ่งของขดลวดไปยังอีกด้านหนึ่ง เช่น ช่วงทางไฟฟ้าของเซ็นเซอร์ดังกล่าวเป็นทวีคูณของ 3600
ข้อได้เปรียบหลักของโพเทนชิโอมิเตอร์แบบหลายเทิร์นคือความละเอียดและความแม่นยำสูง ซึ่งเกิดขึ้นได้เนื่องจากองค์ประกอบตัวต้านทานที่มีความยาวขนาดใหญ่และมีขนาดโดยรวมที่เล็ก
โฟโตโพเทนชิออมิเตอร์
โฟโตโพเทนชิออมิเตอร์ — เป็นอะนาล็อกแบบไม่สัมผัสของโพเทนชิออมิเตอร์ทั่วไปที่มีชั้นตัวต้านทาน การสัมผัสเชิงกลในนั้นจะถูกแทนที่ด้วยโฟโตคอนดักทีฟ ซึ่งแน่นอนว่าจะเพิ่มความน่าเชื่อถือและอายุการใช้งาน สัญญาณจากโฟโตโพเทนชิออมิเตอร์ถูกควบคุมโดยโพรบแสงที่ทำหน้าที่เป็นแถบเลื่อน มันถูกสร้างขึ้นโดยอุปกรณ์ออปติกพิเศษและสามารถถูกแทนที่ได้เนื่องจากการกระทำทางกลภายนอกตามชั้นโฟโตคอนดักทีฟ ณ จุดที่ photolayer ถูกเปิดออก photoconductivity ส่วนเกิน (เทียบกับความมืด) เกิดขึ้นและมีการสัมผัสทางไฟฟ้า
โฟโตโพเทนชิออมิเตอร์แบ่งตามวัตถุประสงค์ออกเป็นเชิงเส้นและเชิงหน้าที่
โฟโตโพเทนชิโอมิเตอร์แบบใช้งานได้ช่วยให้การเคลื่อนที่เชิงพื้นที่ของแหล่งกำเนิดแสงถูกแปลงเป็นสัญญาณไฟฟ้าด้วยรูปแบบการทำงานที่กำหนดเนื่องจากชั้นตัวต้านทานที่ทำโปรไฟล์ (ไฮเพอร์โบลิก เอกซ์โปเนนเชียล ลอการิทึม)