การสตาร์ทมอเตอร์ของโรเตอร์โรเตอร์
คุณสมบัติการเริ่มต้นของมอเตอร์แบบอะซิงโครนัสขึ้นอยู่กับลักษณะของการออกแบบ โดยเฉพาะอย่างยิ่งบนอุปกรณ์โรเตอร์
การเริ่มต้นของมอเตอร์เหนี่ยวนำนั้นมาพร้อมกับกระบวนการชั่วคราวของเครื่องจักรซึ่งเกี่ยวข้องกับการเปลี่ยนของโรเตอร์จากสถานะพักไปสู่สถานะการหมุนที่สม่ำเสมอซึ่งแรงบิดของมอเตอร์จะสมดุลกับช่วงเวลาของแรงต้าน เพลาของเครื่อง
เมื่อสตาร์ทมอเตอร์แบบอะซิงโครนัส จะมีการใช้พลังงานไฟฟ้าเพิ่มขึ้นจากเครือข่ายแหล่งจ่าย ซึ่งไม่เพียงแต่ใช้เพื่อเอาชนะแรงบิดในการเบรกที่ใช้กับเพลาและครอบคลุมการสูญเสียในมอเตอร์แบบอะซิงโครนัสเท่านั้น แต่ยังเพื่อสื่อสารจลนพลศาสตร์บางอย่างด้วย พลังงานไปยังการเชื่อมโยงที่เคลื่อนไหวของหน่วยการผลิต ดังนั้นเมื่อสตาร์ทมอเตอร์เหนี่ยวนำจะต้องพัฒนาแรงบิดเพิ่มขึ้น
สำหรับมอเตอร์เหนี่ยวนำที่มีโรเตอร์ แรงบิดเริ่มต้นที่สอดคล้องกับสลิปที่มี n = 1 ขึ้นอยู่กับความต้านทานแบบแอคทีฟของตัวต้านทานแบบปรับได้ที่ใช้ในวงจรโรเตอร์
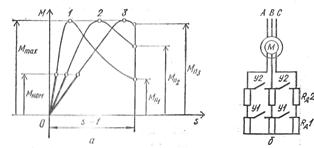
ข้าว. 1.การสตาร์ทมอเตอร์แบบอะซิงโครนัสสามเฟสด้วยโรเตอร์โรเตอร์: a - กราฟของการพึ่งพาแรงบิดของมอเตอร์ที่มีโรเตอร์โรเตอร์จากการเลื่อนไถลที่ความต้านทานที่ใช้งานต่างๆ ของตัวต้านทานในวงจรโรเตอร์ b - วงจรสำหรับเชื่อมต่อตัวต้านทานและหน้าสัมผัสปิดสำหรับ การเร่งความเร็วไปยังวงจรโรเตอร์
ดังนั้นเมื่อปิดหน้าสัมผัสเร่งความเร็ว U1, U2 เช่น เมื่อสตาร์ทมอเตอร์เหนี่ยวนำด้วยการลัดวงจรของสลิปริง แรงบิดเริ่มต้นเริ่มต้น Mn1 = (0.5 -1.0) Mnom และกระแสเริ่มต้นเริ่มต้น Azn = ( 4.5 — 7) Aznom และ คนอื่น.
แรงบิดเริ่มต้นเพียงเล็กน้อยของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่มีโรเตอร์แบบพันแผลอาจไม่เพียงพอที่จะขับเคลื่อนหน่วยการผลิตและการเร่งความเร็วที่ตามมา และกระแสเริ่มต้นที่มีนัยสำคัญจะนำไปสู่ความร้อนที่เพิ่มขึ้นของขดลวดมอเตอร์ ซึ่งจำกัดความถี่การสลับของมัน และในเครือข่าย ด้วยพลังงานต่ำทำให้แรงดันไฟฟ้าตกชั่วคราวซึ่งไม่พึงปรารถนาสำหรับการทำงานของเครื่องรับอื่น สถานการณ์เหล่านี้อาจเป็นสาเหตุที่ทำให้ไม่สามารถใช้มอเตอร์เหนี่ยวนำแบบโรเตอร์พันแผลที่มีกระแสเริ่มต้นขนาดใหญ่เพื่อขับเคลื่อนกลไกการทำงานได้

การแนะนำตัวต้านทานแบบปรับได้ในวงจรโรเตอร์ของมอเตอร์เรียกว่าตัวต้านทานเริ่มต้น ไม่เพียงลดกระแสเริ่มต้นเริ่มต้น แต่ในขณะเดียวกันก็เพิ่มแรงบิดเริ่มต้นเริ่มต้นซึ่งสามารถเข้าถึงแรงบิดสูงสุด Mmax (ต้นฉบับ 1, a, เส้นโค้ง 3) ถ้าสลิปวิกฤตของมอเตอร์โรเตอร์แบบพันเฟส
skr = (R2' + ถ') / (X1 + X2') = 1,
โดยที่ถ' — ความต้านทานที่ใช้งานของตัวต้านทานในเฟสของมอเตอร์โรเตอร์ที่คดเคี้ยว ลดลงไปที่เฟสของสเตเตอร์ที่คดเคี้ยวการเพิ่มความต้านทานแบบแอคทีฟของตัวต้านทานสตาร์ทนั้นไม่สามารถทำได้ เนื่องจากจะทำให้แรงบิดเริ่มต้นลดลงและออกจากจุดของแรงบิดสูงสุดในบริเวณสลิป s> 1 ซึ่งไม่รวมความเป็นไปได้ในการเร่งความเร็วของโรเตอร์
ความต้านทานแบบแอกทีฟที่จำเป็นของตัวต้านทานเพื่อสตาร์ทมอเตอร์เฟสโรเตอร์ถูกกำหนดตามข้อกำหนดการเริ่มต้น ซึ่งอาจเบาได้เมื่อ Mn = (0.1 — 0.4) Mnom ปกติถ้า Mn — (0.5 — 0.75) Mn และรุนแรงที่ Mn ≥ I
เพื่อรักษาแรงบิดที่มากเพียงพอด้วยมอเตอร์โรเตอร์แบบพันเฟสระหว่างการเร่งความเร็วของหน่วยการผลิต เพื่อลดระยะเวลาของกระบวนการชั่วคราวและลดความร้อนของมอเตอร์ จำเป็นต้องค่อยๆ ลดความต้านทานที่ใช้งานอยู่ ของตัวต้านทานเริ่มต้น การเปลี่ยนแปลงของแรงบิดที่อนุญาตระหว่างการเร่งความเร็ว M (t) กำหนดโดยเงื่อนไขทางไฟฟ้าและทางกลที่จำกัดขีดจำกัดของแรงบิดสูงสุด M> 0.85Mสูงสุด โมเมนต์สวิตชิ่ง M2 >> Ms (รูปที่ 2) เช่นเดียวกับการเร่งความเร็ว

ข้าว. 2. ลักษณะการเริ่มต้นของมอเตอร์แบบอะซิงโครนัสสามเฟสพร้อมโรเตอร์แบบหมุน

การรวมตัวต้านทานเริ่มต้นนั้นมั่นใจได้โดยการรวมคันเร่ง Y1, Y2 ตามลำดับที่เวลา t1, t2 นับจากช่วงเวลาที่สตาร์ทเครื่องยนต์เมื่อระหว่างการเร่งความเร็วแรงบิด M จะเท่ากับช่วงเวลาการสลับ M2 ดังนั้น ในระหว่างการสตาร์ททั้งหมด แรงบิดสูงสุดทั้งหมดจะเท่ากันและแรงบิดในการสลับทั้งหมดจะเท่ากัน
เนื่องจากแรงบิดและกระแสของมอเตอร์แบบอะซิงโครนัสกับโรเตอร์แบบพันมีความสัมพันธ์กัน จึงเป็นไปได้ที่จะตั้งค่าขีดจำกัดกระแสสูงสุดระหว่างการเร่งความเร็วของโรเตอร์ I1 = (1.5 — 2.5) Aznom และกระแสสลับ Az2 ซึ่งควรให้โมเมนต์สลับ M2 > M.° C.
การตัดการเชื่อมต่อของมอเตอร์แบบอะซิงโครนัสกับโรเตอร์แผลจากเครือข่ายอุปทานจะดำเนินการด้วยการลัดวงจรของวงจรโรเตอร์เพื่อหลีกเลี่ยงการปรากฏตัวของแรงดันไฟฟ้าเกินในเฟสของสเตเตอร์ที่คดเคี้ยวซึ่งอาจเกินแรงดันไฟฟ้าที่กำหนดของเฟสเหล่านี้ 3 — 4 ครั้ง ถ้าวงจรโรเตอร์เปิดในขณะที่มอเตอร์หยุด
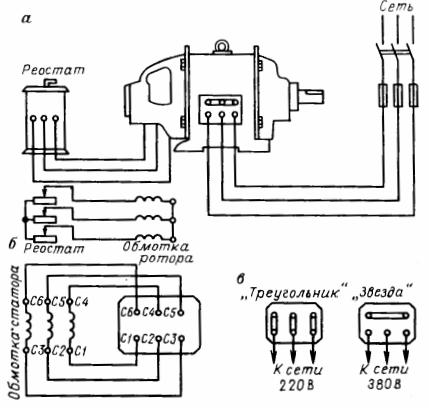
ข้าว. 3. รูปแบบการเชื่อมต่อของขดลวดมอเตอร์กับโรเตอร์เฟส: a - ไปยังเครือข่ายพลังงาน, b - โรเตอร์, c - บนแผงขั้วต่อ
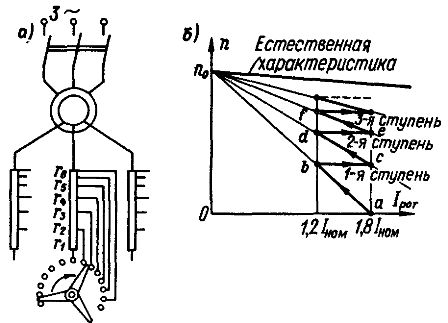
ข้าว. 4. การสตาร์ทมอเตอร์ด้วยเฟสโรเตอร์: a — วงจรสวิตชิ่ง, b — ลักษณะทางกล