วิธีการหาการสูญเสียไฟฟ้าในสาย หม้อแปลง และมอเตอร์ไฟฟ้า
การกำหนดการสูญเสียพลังงานในสาย
การสูญเสียพลังงานΔE (kW • h) ในบรรทัด, หม้อแปลงสำหรับรอบระยะเวลาบัญชี (เดือน, ไตรมาส, ปี) ในสภาวะการผลิต, ใช้ผลการวัดการทดลอง, ขอแนะนำให้กำหนดจากนิพจน์
โดยที่ Eh.s — การสูญเสียไฟฟ้าสำหรับวันปกติของรอบระยะเวลาบัญชี, กิโลวัตต์ • ชั่วโมง; n คือจำนวนวันทำการในรอบระยะเวลาบัญชี
การสูญเสียพลังงานสุดสัปดาห์จะคำนวณแยกต่างหาก
วันปกติของรอบระยะเวลาบัญชีมีดังนี้
-
ตามรายการในสมุดบันทึกกำหนดการใช้พลังงานสำหรับช่วงเวลาทางบัญชี
-
ตามปริมาณการใช้ที่กำหนดไว้สำหรับรอบระยะเวลาการรายงาน จะมีการกำหนดปริมาณการใช้ไฟฟ้าเฉลี่ยต่อวัน
-
ตามสมุดบันทึกพบว่าหนึ่งวันมีการใช้พลังงานเท่ากัน (หรือใกล้เคียง) กับค่าเฉลี่ยรายวันที่ได้รับข้างต้น
วันที่พบและกำหนดการโหลดจริงจะถือว่าเป็นเรื่องปกติ
การสูญเสียไฟฟ้าในแถวรอบระยะเวลาบัญชีโดยใช้ตารางการโหลดสำหรับวันทั่วไปสามารถคำนวณได้จากสูตร

โดยที่ Kf เป็นตัวประกอบรูปร่างของกราฟโหลด Ic คือค่าเฉลี่ยของเส้นปัจจุบันสำหรับวันทั่วไป A; Re — ความต้านทานที่ใช้งานเทียบเท่าของสาย, โอห์ม; Tr คือจำนวนชั่วโมงทำงานในรอบบัญชี
สำหรับโหลดไฟฟ้าของโรงงานอุตสาหกรรมส่วนใหญ่ ค่า Kf มักจะอยู่ในช่วง 1.01-1.1 สำหรับองค์กรที่มีโปรแกรมการผลิตและกระบวนการทางเทคโนโลยีค่อนข้างคงที่ Kf จะแปรผันภายในขอบเขตที่ไม่สำคัญมากนัก ดังนั้นในการคำนวณความสูญเสีย จะต้องกำหนดค่าสัมประสิทธิ์นี้ 3-5 เท่า และหาค่าเฉลี่ยจากค่าที่อ่านได้เหล่านี้ โดยถือว่ามีค่าคงที่ภายในรอบระยะเวลาการรายงาน
ภายใต้สภาวะการทำงาน Kf ของเส้นสามารถคำนวณได้อย่างแม่นยำเพียงพอตามการอ่านมาตรวัดพลังงานที่ใช้งานตามสูตร
โดยที่ n = t / Δt คือจำนวนการอ่านตัวนับ t — เวลาที่กำหนด Kf, h; Δt — เวลาของการมาร์กหนึ่งครั้ง h; ปริมาณการใช้ไฟฟ้า Eai ที่ใช้งานสำหรับการทำเครื่องหมาย i-th ของการอ่านค่ามิเตอร์, kW • h; Ea คือปริมาณการใช้ไฟฟ้าที่ใช้งานตามเวลาที่กำหนดโดยมิเตอร์ kW • h
เส้นค่าเฉลี่ยปัจจุบัน
โดยที่ Ea (Er) คือการใช้พลังงานที่ใช้งาน (ปฏิกิริยา) ในแต่ละวัน กิโลวัตต์ • ชั่วโมง (kvar • ชั่วโมง); U — แรงดันสาย, kV; Tr คือจำนวนชั่วโมงทำงานในแต่ละวัน cosφav — ค่าเฉลี่ยถ่วงน้ำหนักของตัวประกอบกำลังสำหรับเวลา Tr
ความต้านทานเทียบเท่าในการทำงาน
โดยที่ ΔEa.s — การสูญเสียพลังงานที่ใช้งานของเครือข่ายสาขาในช่วงเวลา T, kW • h; ฉันคือปัจจุบันของส่วนหลักของเครือข่าย A.
บางครั้ง (สำหรับวงจรที่ซับซ้อน) เป็นการยากมากที่จะกำหนดความต้านทานเทียบเท่าโดยใช้การอ่านค่าของเครื่องมือ ในกรณีนี้สามารถกำหนดได้โดยการคำนวณ
สำหรับแนวเส้นตรงที่มีการรับน้ำหนักที่ปลายอย่างเข้มข้น

โดยที่ r0 เป็นแนวต้านที่ระยะ 1 ม. ของเส้น ล. — ความยาวเส้น ม.
สำหรับเส้นแยกที่แสดงในรูป 1,
โดยที่ Rp.l. — แนวต้านที่ใช้งานอยู่ของเส้นอุปทาน Ri คือความต้านทานที่ใช้งานอยู่ของส่วนของเส้น i-ro จากจุดสิ้นสุดของเส้นจ่ายไปยังโหลด K3i = Pi / P1 — โหลดแฟกเตอร์ของ i -th เมื่อเทียบกับส่วนที่โหลดมากที่สุด ซึ่งนำมาก่อน
สูตรข้างต้นได้มาจากสมมติฐานที่ว่าตัวประกอบกำลังของส่วนต่างๆมีค่าเท่ากันโดยประมาณ
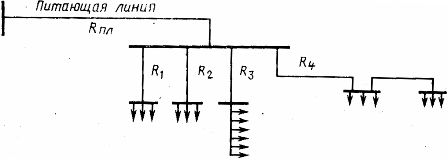
ข้าว. 1. วงจรไฟฟ้าสำหรับโหลดออกจากรางเวิร์คช็อป TP
การหาค่าการสูญเสียพลังงานในหม้อแปลง
การสูญเสียของไฟฟ้าที่ใช้งานอยู่ในหม้อแปลงสำหรับรอบระยะเวลาการรายงาน

โดยที่ ΔPXX — การสูญเสียพลังงานที่ไม่ได้ใช้งาน, กิโลวัตต์; ΔРКЗ — การสูญเสียพลังงานไฟฟ้าลัดวงจร, กิโลวัตต์; T0, Tr — จำนวนชั่วโมงของการเชื่อมต่อหม้อแปลงกับเครือข่ายและจำนวนชั่วโมงการทำงานของหม้อแปลงภายใต้ภาระสำหรับรอบระยะเวลาการรายงาน Kz = ICp / อินอม t คือปัจจัยโหลดปัจจุบันของหม้อแปลง ICp — กระแสเฉลี่ยของหม้อแปลงสำหรับรอบระยะเวลาการรายงาน A; Inom t คือพิกัดกระแสของหม้อแปลง A.
ดูที่นี่สำหรับรายละเอียดเพิ่มเติม: วิธีตรวจสอบการสูญเสียไฟฟ้าในหม้อแปลงไฟฟ้า
การหาค่าการสูญเสียพลังงานในมอเตอร์ไฟฟ้า
สำหรับหน่วยขนาดใหญ่ (โรงสีสำหรับบดเศษและเส้นใย, ชิป, คอมเพรสเซอร์, ปั๊ม ฯลฯ) จำเป็นต้องคำนึงถึงการสูญเสียไฟฟ้าในมอเตอร์และในกลไกที่ขับเคลื่อนโดยพวกมันในสมดุลทางไฟฟ้าของหน่วย
ในระหว่างการทำงานอยู่กับที่ของมอเตอร์ไฟฟ้า การสูญเสียในมอเตอร์จะถูกกำหนดเป็นผลรวมของการสูญเสียในโลหะของขดลวด เหล็กกล้า และกลไก การสูญเสียในโลหะของขดลวดถูกกำหนดโดยสูตรข้างต้นซึ่งแทนที่ด้วย Ra พวกเขาแทนที่: สำหรับมอเตอร์กระแสตรง - ความต้านทานกระดอง r0, โอห์ม; สำหรับมอเตอร์ซิงโครนัส — ความต้านทานของสเตเตอร์ r1, โอห์ม; สำหรับมอเตอร์แบบอะซิงโครนัส — ความต้านทานของสเตเตอร์และความต้านทานของโรเตอร์ r1 + r2 ลดลงเหลือโอห์มของสเตเตอร์
การสูญเสียเหล็ก ΔEa.s (kW • h) ถูกกำหนดโดยใช้เครื่องมือที่มีอยู่ในมอเตอร์ขนาดใหญ่ (มิเตอร์วัดพลังงานที่ใช้งาน, แอมมิเตอร์) สำหรับมอเตอร์แบบอะซิงโครนัสของโรเตอร์โรเตอร์

โดยที่ P0 คือกำลังเปิดของโรเตอร์ที่กำหนดโดยมิเตอร์หรือวัตต์มิเตอร์, กิโลวัตต์; I1.o — กระแสสเตเตอร์ของโรเตอร์เปิดที่กำหนดโดยแอมมิเตอร์ของมอเตอร์ A.
สำหรับมอเตอร์ทั้งหมด ยกเว้นแบบอะซิงโครนัสกับเฟสโรเตอร์ ไม่ควรแยกการสูญเสียเหล็กเป็นองค์ประกอบอิสระในสมดุลทางไฟฟ้าเนื่องจากความซับซ้อนของตัวเลือกดังกล่าว เนื่องจากการสูญเสียในเหล็กของเครื่องยนต์นั้นขึ้นอยู่กับภาระเพียงเล็กน้อยเช่นเดียวกับการสูญเสียทางกลจึงแนะนำให้พิจารณาโดยทั่วไปเท่านั้น
การสูญเสียทางกล ΔEmech (kW • h) ในหน่วยและการสูญเสียทางไฟฟ้าในเหล็กของมอเตอร์ที่ลดลง

สำหรับเครื่อง DC

โดยที่ Px.x คือกำลังเดินเบาของเครื่องยนต์ที่เชื่อมต่อกับกลไก กำหนดโดยตัวนับหรือวัตต์มิเตอร์ กิโลวัตต์ กระแสเดินเบาของมอเตอร์ Ixx กำหนดโดยแอมมิเตอร์ของมอเตอร์ A.
เนื่องจากสำหรับมอเตอร์เหนี่ยวนำที่มีโรเตอร์แบบพันแผล การสูญเสียเหล็กจะถูกกำหนดโดยสูตรที่ให้ไว้ก่อนหน้านี้ การสูญเสียทางกลสามารถแยกแยะได้โดยใช้สูตรสุดท้าย
สำหรับเครื่องจักร DC การสูญเสียเหล็กเป็นเศษส่วนเล็กน้อยเมื่อเทียบกับการสูญเสียทางกล เนื่องจากบนเพลามอเตอร์นอกเหนือจากการสูญเสียของตัวเองแล้วยังมีการสูญเสียเชิงกลของกลไกขับเคลื่อนด้วย จึงเป็นไปได้ที่จะเพิกเฉยต่อการสูญเสียในเหล็กโดยไม่มีข้อผิดพลาดมากนัก และถือว่าสูตรสุดท้ายกำหนดการสูญเสียเชิงกลของมอเตอร์และ กลไก .