ตัวแปลงไทริสเตอร์ DC / DC
 ตัวแปลงไทริสเตอร์ DC / DC (DC) เป็นอุปกรณ์สำหรับแปลงกระแสสลับเป็นกระแสตรงโดยมีการควบคุมตามกฎที่กำหนดของพารามิเตอร์เอาต์พุต (กระแสและแรงดัน) ตัวแปลงไทริสเตอร์ได้รับการออกแบบมาเพื่อจ่ายไฟให้กับวงจรกระดองของมอเตอร์และขดลวดสนาม
ตัวแปลงไทริสเตอร์ DC / DC (DC) เป็นอุปกรณ์สำหรับแปลงกระแสสลับเป็นกระแสตรงโดยมีการควบคุมตามกฎที่กำหนดของพารามิเตอร์เอาต์พุต (กระแสและแรงดัน) ตัวแปลงไทริสเตอร์ได้รับการออกแบบมาเพื่อจ่ายไฟให้กับวงจรกระดองของมอเตอร์และขดลวดสนาม
ไทริสเตอร์คอนเวอร์เตอร์ประกอบด้วยหน่วยพื้นฐานดังต่อไปนี้:
• หม้อแปลงหรือเครื่องปฏิกรณ์แบบจำกัดกระแสที่ด้านไฟฟ้ากระแสสลับ
• บล็อกวงจรเรียงกระแส
• เครื่องปฏิกรณ์ปรับให้เรียบ
• องค์ประกอบของระบบควบคุม การป้องกัน และอาณัติสัญญาณ
หม้อแปลงจะจับคู่แรงดันอินพุตและเอาต์พุตของตัวแปลง และ (เช่น เครื่องปฏิกรณ์จำกัดกระแส) จะจำกัดกระแสลัดวงจรในวงจรอินพุต เครื่องปฏิกรณ์ปรับให้เรียบได้รับการออกแบบมาเพื่อทำให้ระลอกคลื่นของแรงดันและกระแสที่แก้ไขแล้วราบรื่น ไม่มีการจัดเตรียมเครื่องปฏิกรณ์หากตัวเหนี่ยวนำโหลดเพียงพอที่จะจำกัดการกระเพื่อมภายในขอบเขตที่กำหนด
การใช้ไทริสเตอร์คอนเวอร์เตอร์ DC-DC ช่วยให้สามารถรับรู้ถึงคุณลักษณะของไดรฟ์ไฟฟ้าแบบเดียวกับเมื่อใช้คอนเวอร์เตอร์แบบหมุนใน ระบบเครื่องกำเนิดไฟฟ้า-มอเตอร์ (D — D) นั่นคือ เพื่อปรับความเร็วและแรงบิดของเครื่องยนต์ในช่วงกว้าง เพื่อให้ได้คุณสมบัติทางกลพิเศษและลักษณะชั่วคราวที่ต้องการเมื่อสตาร์ท หยุด ถอยหลัง ฯลฯ
อย่างไรก็ตาม เมื่อเปรียบเทียบกับเครื่องแปลงไฟฟ้าสถิตแบบหมุน พวกเขามีข้อดีหลายประการที่ทราบ ซึ่งเป็นเหตุผลว่าทำไมเครื่องแปลงไฟฟ้าสถิตจึงเป็นที่นิยมในการพัฒนาใหม่ ๆ ของเครนไฟฟ้า ตัวแปลงไทริสเตอร์ DC-DC มีแนวโน้มดีที่สุดสำหรับใช้ในไดรฟ์ไฟฟ้าของกลไกเครนที่มีกำลังมากกว่า 50-100 กิโลวัตต์และกลไกที่จำเป็นเพื่อให้ได้คุณสมบัติพิเศษของไดรฟ์ในโหมดคงที่และไดนามิก
แผนการแก้ไขหลักการสร้างวงจรไฟฟ้าของตัวแปลง
ตัวแปลงไทริสเตอร์ทำด้วยเฟสเดียวและหลายเฟส วงจรแก้ไข… มีอัตราส่วนการออกแบบหลายแบบสำหรับโครงร่างการแก้ไขขั้นพื้นฐาน หนึ่งในแผนการเหล่านี้แสดงในรูปที่ 1, ก. การควบคุมแรงดัน Va และกระแส Ia เกิดจากการเปลี่ยนมุมควบคุม α... ในรูป 1, b-e, ตัวอย่างเช่น ลักษณะของการเปลี่ยนแปลงของกระแสและแรงดันในวงจรการแก้ไขเป็นศูนย์สามเฟสที่มีโหลดแบบแอคทีฟอินดัคทีฟแสดงอยู่
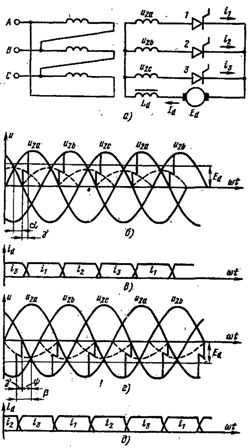
ข้าว. 1. วงจรเป็นกลางสามเฟส (a) และไดอะแกรมของการเปลี่ยนแปลงกระแสและแรงดันในโหมดวงจรเรียงกระแส (b, c) และอินเวอร์เตอร์ (d, e)
มุมที่แสดงในแผนภาพ γ (มุมสลับ) แสดงถึงช่วงเวลาที่กระแสไหลผ่านไทริสเตอร์สองตัวพร้อมกัน การพึ่งพาค่าเฉลี่ยของแรงดันไฟฟ้าที่ปรับแล้ว Вa บนมุมการปรับ α เรียกว่าลักษณะการควบคุม
สำหรับวงจรที่เป็นกลาง นิพจน์จะกำหนดแรงดันไฟฟ้าที่แก้ไขแล้วโดยเฉลี่ย
ที่ไหน m - จำนวนเฟสของขดลวดทุติยภูมิของหม้อแปลง U2f คือค่า rms ของแรงดันเฟสของขดลวดทุติยภูมิของหม้อแปลง
สำหรับวงจรบริดจ์ Udo สูงกว่า 2 เท่า เนื่องจากวงจรเหล่านี้เทียบเท่ากับการเชื่อมต่อแบบอนุกรมของวงจรศูนย์สองวงจร
ตามกฎแล้ววงจรแก้ไขเฟสเดียวใช้ในวงจรที่มีความต้านทานอุปนัยค่อนข้างมากวงจรเหล่านี้เป็นวงจรของขดลวดกระตุ้นอิสระของมอเตอร์รวมถึงวงจรกระดองของมอเตอร์กำลังต่ำ (สูงถึง 10-15 กิโลวัตต์) วงจรโพลีเฟสส่วนใหญ่จะใช้สำหรับการหล่อวงจรกระดองของมอเตอร์ที่มีกำลังมากกว่า 15–20 กิโลวัตต์และน้อยกว่าสำหรับการจ่ายกำลังของขดลวดสนาม เมื่อเปรียบเทียบกับเฟสเดียว วงจรเรียงกระแสโพลีเฟสมีข้อดีหลายประการ สิ่งหลักคือ: การเต้นของแรงดันและกระแสที่แก้ไขลดลง, การใช้หม้อแปลงและไทริสเตอร์ที่ดีขึ้น, การโหลดเฟสของเครือข่ายอุปทานแบบสมมาตร
ในตัวแปลงไทริสเตอร์ DC-DC สำหรับเครนขับเคลื่อนที่มีกำลังมากกว่า 20 กิโลวัตต์ การใช้ วงจรบริดจ์สามเฟส… นี่เป็นเพราะการใช้หม้อแปลงและไทริสเตอร์อย่างดี ระดับการกระเพื่อมต่ำของแรงดันและกระแสที่แก้ไข และความเรียบง่ายของวงจรและการออกแบบหม้อแปลงข้อได้เปรียบที่รู้จักกันดีของวงจรบริดจ์สามเฟสคือไม่สามารถทำได้ด้วยการเชื่อมต่อหม้อแปลง แต่ใช้เครื่องปฏิกรณ์แบบ จำกัด กระแสซึ่งมีขนาดที่เล็กกว่าขนาดของหม้อแปลงอย่างมาก
ในวงจรที่เป็นกลางสามเฟสเงื่อนไขสำหรับการใช้หม้อแปลงกับกลุ่มการเชื่อมต่อที่ใช้กันทั่วไป D / D และΔ / Y นั้นแย่ลงเนื่องจากมีองค์ประกอบคงที่ของฟลักซ์ สิ่งนี้นำไปสู่การเพิ่มส่วนตัดขวางของวงจรแม่เหล็กและตามด้วยกำลังการออกแบบของหม้อแปลง เพื่อกำจัดองค์ประกอบคงที่ของฟลักซ์จะใช้การเชื่อมต่อแบบซิกแซกของขดลวดทุติยภูมิของหม้อแปลงซึ่งจะเพิ่มพลังการออกแบบด้วย ระดับที่เพิ่มขึ้น การกระเพื่อมของแรงดันไฟฟ้าที่แก้ไข ร่วมกับข้อเสียที่ระบุไว้ข้างต้น จะจำกัดการใช้วงจรนิวทรัลสามเฟส
ขอแนะนำให้ใช้วงจรปฏิกรณ์ 6 เฟสเมื่อใช้กับแรงดันต่ำและกระแสสูง เนื่องจากในวงจรนี้กระแสโหลดจะไหลแบบขนานแทนที่จะเป็นอนุกรมผ่านไดโอดสองตัวเหมือนในวงจรบริดจ์สามเฟส ข้อเสียของวงจรนี้คือการมีเครื่องปฏิกรณ์แบบปรับให้เรียบซึ่งมีกำลังโดยทั่วไปประมาณ 70% ของกำลังไฟที่แก้ไขแล้ว นอกจากนี้ยังใช้การออกแบบหม้อแปลงที่ค่อนข้างซับซ้อนในวงจรหกเฟส
วงจรเรียงกระแสที่ใช้ไทริสเตอร์มีการทำงานสองโหมด ได้แก่ วงจรเรียงกระแสและอินเวอร์เตอร์ เมื่อทำงานในโหมดอินเวอร์เตอร์ พลังงานจากวงจรโหลดจะถูกถ่ายโอนไปยังเครือข่ายอุปทาน นั่นคือในทิศทางตรงกันข้ามเมื่อเทียบกับโหมดวงจรเรียงกระแส ดังนั้น เมื่อกลับด้าน กระแสและ e เป็นต้น c. ขดลวดของหม้อแปลงถูกนำไปในทิศทางตรงกันข้ามและเมื่อยืดให้ตรง - ตามนั้นแหล่งที่มาปัจจุบันในโหมดกลับด้านคือ e เป็นต้น c. โหลด (เครื่อง DC, ตัวเหนี่ยวนำ) ที่ต้องเกินแรงดันอินเวอร์เตอร์
การถ่ายโอนตัวแปลงไทริสเตอร์จากโหมดวงจรเรียงกระแสไปยังโหมดอินเวอร์เตอร์ทำได้โดยการเปลี่ยนขั้วของ e เป็นต้น ค. การเพิ่มภาระและมุม α เหนือ π / 2 ด้วยโหลดอุปนัย
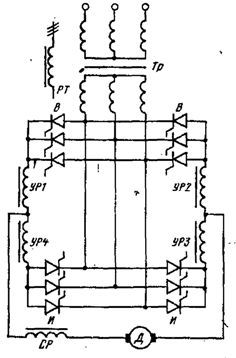
ข้าว. 2. วงจรป้องกันการขนานสำหรับการเปิดกลุ่มของวาล์ว UR1 — UR4 — เครื่องปฏิกรณ์ปรับระดับ; RT — เครื่องปฏิกรณ์จำกัดกระแส; CP — เครื่องปฏิกรณ์ปรับให้เรียบ
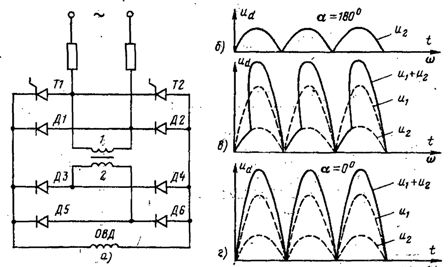
ข้าว. 3. แผนผังของ TP กลับไม่ได้สำหรับวงจรของขดลวดกระตุ้นของมอเตอร์ เพื่อให้แน่ใจว่าโหมดผกผันมีความจำเป็นที่ไทริสเตอร์ปิดถัดไปจะมีเวลาคืนค่าคุณสมบัติการบล็อกในขณะที่มีแรงดันลบอยู่นั่นคือในมุม φ (รูปที่ 1, c)
หากสิ่งนี้ไม่เกิดขึ้น ไทริสเตอร์ปิดสามารถเปิดใหม่ได้เมื่อจ่ายแรงดันไปข้างหน้า ซึ่งจะทำให้อินเวอร์เตอร์พลิกคว่ำ ซึ่งจะเกิดกระแสไฟฟ้าฉุกเฉิน เช่น เป็นต้น ค. เครื่องไฟฟ้ากระแสตรงและหม้อแปลงไฟฟ้าจะมีทิศทางตรงกัน จำเป็นต้องมีเงื่อนไขเพื่อหลีกเลี่ยงการโรลโอเวอร์
โดยที่δ - มุมของการฟื้นฟูคุณสมบัติการล็อคของไทริสเตอร์ β = π — α นี่คือมุมนำของอินเวอร์เตอร์
วงจรไฟฟ้าของตัวแปลงไทริสเตอร์ซึ่งมีไว้สำหรับจ่ายไฟให้กับวงจรกระดองของมอเตอร์นั้นทำขึ้นทั้งแบบย้อนกลับไม่ได้ (หนึ่งกลุ่มเรียงกระแสของไทริสเตอร์) และย้อนกลับได้ (สองกลุ่มเรียงกระแส) ไทริสเตอร์คอนเวอร์เตอร์เวอร์ชันที่เปลี่ยนกลับไม่ได้ ให้การนำไฟฟ้าแบบทิศทางเดียว ช่วยให้การทำงานในโหมดมอเตอร์และเครื่องกำเนิดไฟฟ้ามีแรงบิดของมอเตอร์เพียงทิศทางเดียว
ในการเปลี่ยนทิศทางของช่วงเวลานั้น จำเป็นต้องเปลี่ยนทิศทางของกระแสกระดองด้วยทิศทางของค่าคงที่ของฟลักซ์ของสนาม หรือเพื่อเปลี่ยนทิศทางของฟลักซ์ของสนามในขณะที่รักษาทิศทางของกระแสของกระดอง
Inverting thyristor converter มีไดอะแกรมวงจรไฟฟ้าหลายประเภท ที่พบมากที่สุดคือโครงร่างที่มีการเชื่อมต่อแบบขนานของวาล์วสองกลุ่มกับขดลวดทุติยภูมิของหม้อแปลง (รูปที่ 2) โครงร่างดังกล่าวสามารถดำเนินการได้โดยไม่ต้องใช้หม้อแปลงแยกต่างหากโดยการป้อนกลุ่มไทริสเตอร์จากเครือข่ายสำรองทั่วไปผ่านตัวจำกัดกระแสแอโนดของเครื่องปฏิกรณ์ RT การเปลี่ยนไปใช้รุ่นเครื่องปฏิกรณ์ช่วยลดขนาดของตัวแปลงไทริสเตอร์ลงอย่างมากและลดต้นทุน
ไทริสเตอร์คอนเวอร์เตอร์สำหรับวงจรคดเคี้ยวของสนามมอเตอร์ส่วนใหญ่ทำขึ้นในโครงสร้างที่กลับไม่ได้ ในรูป 3a แสดงหนึ่งในวงจรสวิตชิ่งของวงจรเรียงกระแสที่ใช้ วงจรนี้ช่วยให้คุณเปลี่ยนกระแสกระตุ้นของมอเตอร์ได้หลากหลาย ค่าต่ำสุดของกระแสเกิดขึ้นเมื่อปิดไทริสเตอร์ T1 และ T2 และสูงสุดเมื่อเปิด ในรูป 3, b, d แสดงลักษณะของการเปลี่ยนแปลงของแรงดันไฟฟ้าที่แก้ไขสำหรับสถานะของไทริสเตอร์ทั้งสองนี้ และในรูปที่ 3 ในเงื่อนไขเมื่อ
วิธีการควบคุมสำหรับการกลับขั้วของไทริสเตอร์คอนเวอร์เตอร์
ในการกลับหัวของไทริสเตอร์คอนเวอร์เตอร์ มีสองวิธีหลักในการควบคุมกลุ่มวาล์ว - แบบร่วมและแบบแยก ในทางกลับกัน การจัดการร่วมจะทำอย่างสม่ำเสมอและไม่สอดคล้องกัน
ด้วยการควบคุมการประสานงานพัลส์การยิง ไทริสเตอร์ ถูกนำไปใช้กับวาล์วทั้งสองกลุ่มในลักษณะที่ค่าเฉลี่ยของแรงดันไฟฟ้าที่แก้ไขสำหรับทั้งสองกลุ่มมีค่าเท่ากัน โดยมีเงื่อนไขดังนี้

โดยที่ av และ ai — มุมการปรับของกลุ่มวงจรเรียงกระแสและอินเวอร์เตอร์ ในกรณีที่การควบคุมไม่สอดคล้องกัน แรงดันเฉลี่ยของกลุ่มอินเวอร์เตอร์จะเกินแรงดันของกลุ่มวงจรเรียงกระแส สามารถทำได้ภายใต้เงื่อนไขที่ว่า

ค่าทันทีของกลุ่มแรงดันไฟฟ้าที่มีการควบคุมร่วมไม่เท่ากันตลอดเวลาอันเป็นผลมาจากการที่วงจรปิด (หรือวงจร) เกิดจากกลุ่มไทริสเตอร์และขดลวดของหม้อแปลงกระแสที่เท่ากันจะ จำกัด ซึ่งเครื่องปฏิกรณ์การทำให้เท่าเทียมกัน UR1-UR4 รวมอยู่ในไทริสเตอร์คอนเวอร์เตอร์ (ดูรูปที่ 1)
เครื่องปฏิกรณ์เชื่อมต่อกับลูปกระแสที่เท่ากัน หนึ่งหรือสองวงต่อกลุ่ม และเลือกค่าความเหนี่ยวนำเพื่อให้กระแสที่เท่ากันไม่เกิน 10% ของกระแสโหลดที่กำหนด เมื่อเปิดเครื่องปฏิกรณ์จำกัดกระแส สองตัวต่อกลุ่ม เครื่องปฏิกรณ์จะอิ่มตัวเมื่อกระแสโหลดไหล ตัวอย่างเช่น ระหว่างการทำงานของกลุ่ม B เครื่องปฏิกรณ์ UR1 และ UR2 จะอิ่มตัว ในขณะที่เครื่องปฏิกรณ์ URZ และ UR4 ยังคงไม่อิ่มตัวและจำกัดกระแสไฟฟ้าที่เท่ากัน หากเครื่องปฏิกรณ์เปิดอยู่ หนึ่งเครื่องต่อกลุ่ม (UR1 และ URZ) เครื่องปฏิกรณ์จะไม่อิ่มตัวเมื่อน้ำหนักบรรทุกไหล
ตัวแปลงที่มีการควบคุมที่ไม่สอดคล้องกันจะมีขนาดเครื่องปฏิกรณ์ที่เล็กกว่าการควบคุมแบบประสานงานอย่างไรก็ตามด้วยการควบคุมที่ไม่สอดคล้องกันช่วงของมุมควบคุมที่อนุญาตจะลดลงซึ่งนำไปสู่การใช้หม้อแปลงที่แย่ลงและตัวประกอบกำลังไฟฟ้าของการติดตั้งลดลงในเวลาเดียวกันลักษณะเชิงเส้นของการควบคุมและความเร็วของไฟฟ้า ไดรฟ์ถูกละเมิด การควบคุมแยกกลุ่มของวาล์วใช้เพื่อกำจัดกระแสที่เท่ากันอย่างสมบูรณ์
การควบคุมแบบแยกส่วนประกอบด้วยความจริงที่ว่าพัลส์ควบคุมนั้นใช้กับกลุ่มที่ควรทำงานในขณะนี้เท่านั้น พัลส์ควบคุมไม่ได้จ่ายให้กับวาล์วของกลุ่มที่ไม่ได้ใช้งาน ในการเปลี่ยนโหมดการทำงานของตัวแปลงไทริสเตอร์จะใช้อุปกรณ์สวิตชิ่งพิเศษซึ่งเมื่อกระแสของตัวแปลงไทริสเตอร์เป็นศูนย์ ให้ลบพัลส์ควบคุมออกจากกลุ่มการทำงานก่อนหน้าก่อน จากนั้นจึงหยุดชั่วคราว (5- 10 มิลลิวินาที) ส่งพัลส์ควบคุมไปยังอีกกลุ่มหนึ่ง
ด้วยการควบคุมแยกต่างหาก ไม่จำเป็นต้องรวมเครื่องปฏิกรณ์อีควอไลซิ่งในวงจรของกลุ่มวาล์วที่แยกจากกัน หม้อแปลงสามารถใช้งานได้เต็มที่ ความน่าจะเป็นของอินเวอร์เตอร์พลิกคว่ำเนื่องจากการลดลงของเวลาการทำงานของตัวแปลงไทริสเตอร์ในโหมดอินเวอร์เตอร์คือ ลดลงการสูญเสียพลังงานจะลดลงและประสิทธิภาพของไดรฟ์ไฟฟ้าจะเพิ่มขึ้นเนื่องจากไม่มีกระแสไฟฟ้าที่เท่ากัน อย่างไรก็ตาม การควบคุมแบบแยกส่วนทำให้ความต้องการความน่าเชื่อถือสูงของอุปกรณ์สำหรับการบล็อกพัลส์ควบคุม
ความผิดปกติในการทำงานของอุปกรณ์ปิดกั้นและการปรากฏตัวของพัลส์ควบคุมในกลุ่มไทริสเตอร์ที่ไม่ทำงานทำให้เกิดการลัดวงจรภายในในตัวแปลงไทริสเตอร์เนื่องจากกระแสที่เท่ากันระหว่างกลุ่มในกรณีนี้ถูก จำกัด โดยรีแอกแตนซ์ของหม้อแปลงเท่านั้น คดเคี้ยวและถึงค่าที่มากเกินยอมรับได้