ผลของโหลดมอเตอร์ไฟฟ้าต่อประสิทธิภาพและกำลัง
การสำรองพลังงานโดยทั่วไปหรือการโหลดต่ำของมอเตอร์ทำให้ประสิทธิภาพและพลังงานลดลง บางครั้งจำเป็นต้องทราบค่าที่แท้จริงของค่าสัมประสิทธิ์เหล่านี้เพื่อกำหนดค่าของพลังงานที่ใช้งานและปฏิกิริยาที่มอเตอร์ไฟฟ้าใช้จากเครือข่าย
ประสิทธิภาพของมอเตอร์ไฟฟ้าที่โหลดน้อยกว่าที่กำหนดสามารถกำหนดได้จากสูตร:
โดยที่ ηnom คือประสิทธิภาพเล็กน้อยของมอเตอร์ไฟฟ้า
ในการกำหนด β ให้ใช้สูตร:

โดยที่ Kz คืออัตราส่วนของโหลดจริงต่อค่าเล็กน้อย (โหลดแฟกเตอร์)
α — ค่าสัมประสิทธิ์ถือว่าเท่ากับ:
• สำหรับมอเตอร์กระแสตรงที่มีการกระตุ้นแบบอนุกรม - ตั้งแต่ 0.5 (สำหรับความเร็วต่ำ) ถึง 1 (สำหรับความเร็วสูง)
• สำหรับมอเตอร์ไฟฟ้าที่มีการกระตุ้นแบบขนาน - ตั้งแต่ 1 (สำหรับความเร็วต่ำ) ถึง 2 (สำหรับความเร็วสูง)
• สำหรับมอเตอร์ไฟฟ้าแบบอะซิงโครนัส — ตั้งแต่ 0.5 ถึง 1; สำหรับเครนและมอเตอร์ไฟฟ้าแบบซิงโครนัส — สูงสุด 2 ตัว
ค่า ตัวประกอบกำลัง มอเตอร์เหนี่ยวนำขึ้นอยู่กับหลายปัจจัย และพูดตามตรงคือมอเตอร์ไฟฟ้าทุกชนิดมีความแตกต่างกัน แม้แต่ในประเภทเดียวกัน
อย่างไรก็ตามภายใต้เงื่อนไขการออกแบบก็เพียงพอที่จะทราบเฉพาะค่าเฉลี่ยโดยประมาณของตัวประกอบกำลังไฟฟ้าขึ้นอยู่กับโหลดที่คาดไว้
จากแผนภูมิวงกลมอย่างง่าย จะได้ความสัมพันธ์ต่อไปนี้:

การกำหนด - ดูรูปที่ 1.
โดยที่tanφ1คือสัมผัสของมุมเฟสที่สอดคล้องกับโหลดจริงของมอเตอร์ไฟฟ้า P1, กิโลวัตต์; tanφnom — ค่าสัมผัสของมุมกะระยะที่สอดคล้องกับโหลดเล็กน้อยของมอเตอร์ไฟฟ้า PH0M (กำหนดโดย cosφnom ที่ระบุในพาสปอร์ตมอเตอร์) σ-อัตราส่วนของช่วงเวลาการพลิกคว่ำต่อค่าเล็กน้อย (อยู่ในขอบเขตที่แคบของ 1.8-2)

K3 — โหลดแฟกเตอร์
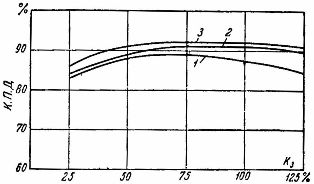
ข้าว. 1. เส้นโค้งประสิทธิภาพของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่แตกต่างกันขึ้นอยู่กับโหลด
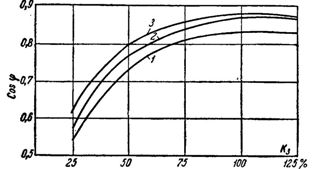
ข้าว. 2. เส้นโค้งของตัวประกอบกำลังของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสขึ้นอยู่กับโหลด
เส้นโค้งของการพึ่งพาของ η และ cosφ บนโหลดสำหรับมอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่พบมากที่สุดจะแสดงในรูปที่ 1 และ 2