วงจรบริดจ์ตัวต้านทานและการนำไปใช้งาน
 ในการวัดทางไฟฟ้า เช่นเดียวกับในกรณีอื่นๆ ตัวต้านทานจะรวมอยู่ในวงจรบริดจ์ไฟฟ้าหรือวงจรบริดจ์ (รูปที่ 1, a)
ในการวัดทางไฟฟ้า เช่นเดียวกับในกรณีอื่นๆ ตัวต้านทานจะรวมอยู่ในวงจรบริดจ์ไฟฟ้าหรือวงจรบริดจ์ (รูปที่ 1, a)
ตัวต้านทานที่มีความต้านทาน R1, R2, R3, R4 สร้างแขนสะพานที่เรียกว่า ส่วนของจุดเชื่อมต่อ a และในวงจรเช่นเดียวกับ b u d เรียกว่าเส้นทแยงมุมของสะพาน โดยปกติแล้วหนึ่งในเส้นทแยงมุมในกรณีนี้คือ ac (เส้นทแยงมุมกำลัง) จะได้รับแรงดันไฟฟ้า U จากแหล่งพลังงานไฟฟ้า ใน bd เส้นทแยงมุมอื่น ๆ (เส้นทแยงมุมการวัด) รวมถึงอุปกรณ์วัดไฟฟ้าหรือเครื่องมืออื่น ๆ
ถ้าค่าความต้านทาน R1 = R4 และ R2 = R3 เท่ากัน แรงดันในส่วน ab และ ad ของกระแส I1 และ I2 (เช่นเดียวกับในส่วน bc และ dc) จะเท่ากัน ดังนั้นจุด b และ d จะมีศักยภาพเท่ากัน . ดังนั้นหากเรารวมตัวต้านทาน R หรืออุปกรณ์วัดไฟฟ้าไว้ในเส้นทแยงมุม bd แล้วในเส้นทแยงมุม I = 0 (รูปที่ 1, b) สะพานดังกล่าวเรียกว่าสมดุล
ความสมดุลของสะพานต้องการแรงดันไฟฟ้า Uab = Uad และ Ubc = Udc เงื่อนไขเหล่านี้จะต้องปฏิบัติตามไม่เพียง แต่เมื่อความต้านทาน R1 = R4 และ R2 = R3 เท่ากัน แต่ยังรวมถึงเมื่ออัตราส่วน R1 / R4 = R2 / R3 เท่ากัน ดังนั้นสะพานจะสมดุลเมื่อผลคูณของความต้านทานของตัวต้านทานที่เชื่อมต่อกับแขนตรงข้ามมีค่าเท่ากัน: R1R3 = R2R4 หากไม่ตรงตามเงื่อนไขนี้ กระแส I จะไหลผ่านตัวต้านทาน R สะพานดังกล่าวเรียกว่าไม่สมดุล
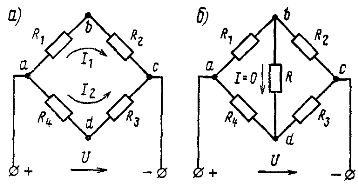
ข้าว. 1. วงจรบริดจ์สำหรับต่อตัวต้านทาน
ตัวอย่างการใช้วงจรบริดจ์ต่อตัวต้านทาน
วงจรสะพานยังใช้เพื่อเปิดรีเลย์สไลด์บนตู้รถไฟไฟฟ้าบางตู้ รีเลย์ทำหน้าที่เป็นเซ็นเซอร์ตรวจจับการลื่นไถลของล้อ รีเลย์ P (รูปที่ 2) รวมอยู่ในเส้นทแยงมุมของสะพานที่เกิดจากมอเตอร์ไฟฟ้า M1 และ M2 ที่เชื่อมต่อแบบอนุกรมสองตัวซึ่งกระแส Id ไหลผ่าน (มอเตอร์ไฟฟ้าในกรณีนี้ถือเป็นแหล่งที่มี EMF E1 และ E2) และตัวต้านทานสองตัวที่มีความต้านทาน R
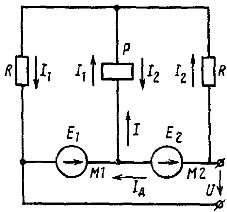
ข้าว. 2. แผนภาพวงจรของรีเลย์ไดรฟ์
ในกรณีที่ไม่มีการรั่วไหล E1 = E2 ดังนั้นกระแสผ่านตัวต้านทาน I1 = I2 ดังนั้นกระแสในขดลวดรีเลย์คือ I = I1 — I2 = 0
เมื่อดริฟต์ ความเร็วในการหมุนของมอเตอร์ลากที่เชื่อมต่อกับระบบล้อกล่องจะเพิ่มขึ้นอย่างรวดเร็ว ในเวลาเดียวกัน e ของมันเพิ่มขึ้นอย่างรวดเร็ว เป็นต้น ด้วย ตัวอย่างเช่น E1 และ I1 ปัจจุบัน เป็นผลให้กระแส I = I1 — I2 จะเริ่มไหลผ่านขดลวดของรีเลย์ P ซึ่งจะทำให้มันทำงานได้ รีเลย์ P ที่มีหน้าสัมผัสเสริมเปิดสัญญาณเตือนและป้อนทรายหรือสั่งงานระบบควบคุมหัวรถจักรไฟฟ้า