พารามิเตอร์และคุณสมบัติพื้นฐานของรีเลย์แม่เหล็กไฟฟ้า
 อุปกรณ์ไฟฟ้าที่ใช้กฎการควบคุมรีเลย์เรียกว่า รีเลย์... ในรีเลย์ เมื่อพารามิเตอร์ควบคุม (อินพุต) เปลี่ยนเป็นค่าที่ตั้งไว้อย่างราบรื่น พารามิเตอร์ควบคุม (เอาต์พุต) จะเปลี่ยนไปอย่างกะทันหัน นอกจากนี้ พารามิเตอร์เหล่านี้อย่างน้อยหนึ่งตัวต้องเป็นไฟฟ้า
อุปกรณ์ไฟฟ้าที่ใช้กฎการควบคุมรีเลย์เรียกว่า รีเลย์... ในรีเลย์ เมื่อพารามิเตอร์ควบคุม (อินพุต) เปลี่ยนเป็นค่าที่ตั้งไว้อย่างราบรื่น พารามิเตอร์ควบคุม (เอาต์พุต) จะเปลี่ยนไปอย่างกะทันหัน นอกจากนี้ พารามิเตอร์เหล่านี้อย่างน้อยหนึ่งตัวต้องเป็นไฟฟ้า
การทำงานของอวัยวะที่ทำหน้าที่ รีเลย์แม่เหล็กไฟฟ้า สามารถตรวจสอบได้ตามแผนภาพในรูป 1. ตัวรับ A แปลงค่าอินพุต (แรงดัน) Uin ที่จ่ายให้กับขดลวด 2 ของวงจรแม่เหล็ก 1 เป็นค่ากลาง เช่น ในแรงเชิงกลของสมอ 3. แรงเชิงกลของสมอ FЯ กระทำต่อระบบสัมผัสของส่วนบริหาร B ค่ากลาง — แรงของสมอ FЯ เป็นสัดส่วนกับค่าอินพุต Uin เทียบกับ a ค่าของแรง Fpr ที่พัฒนาโดยสปริง 9 ของตัวกลาง B เมื่อ Uin <Uav, Fya
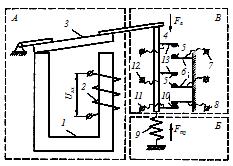 ข้าว. 1 รูปแบบของรีเลย์แม่เหล็กไฟฟ้า
ข้าว. 1 รูปแบบของรีเลย์แม่เหล็กไฟฟ้า
ในกระบวนการดำเนินการรีเลย์แม่เหล็กไฟฟ้าในระดับเวลาจะแยกแยะสี่ขั้นตอน: ระยะเวลา (เวลา) ของการทำงาน tav, ระยะเวลาการทำงาน twork, ระยะเวลา (เวลา) ของการปิดเครื่อง, ระยะเวลา (เวลา) ของการพักผ่อน tp (รูปที่ . 2).
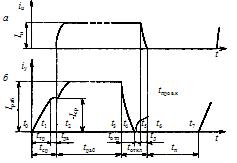
ข้าว. 2. ขึ้นอยู่กับปริมาณของผลผลิต (a) และผลผลิต (b) ตรงเวลา
ระยะเวลาการทำงานของรีเลย์แม่เหล็กไฟฟ้า
 ช่วงเวลาตอบสนองรวมถึงช่วงเวลาตั้งแต่วินาทีที่สัญญาณอินพุตเริ่มส่งผลกระทบต่อส่วนตรวจสอบจนกระทั่งสัญญาณปรากฏในวงจรควบคุม ส่วนของแกน abscissa tav = t2 –t0 ตรงกับช่วงเวลานี้ในรูปที่ 2, ข. ในขณะนี้ t0 กระแสในขดลวดรีเลย์จะเพิ่มขึ้นเป็นค่าที่แรงแม่เหล็กไฟฟ้า Fe ที่กระทำต่อกระดองเริ่มต่อต้านแรงสปริง Fm (แรงเชิงกล) ของตัวกลาง ค่าที่ป้อนจะเรียกว่าค่าที่ยอมรับ
ช่วงเวลาตอบสนองรวมถึงช่วงเวลาตั้งแต่วินาทีที่สัญญาณอินพุตเริ่มส่งผลกระทบต่อส่วนตรวจสอบจนกระทั่งสัญญาณปรากฏในวงจรควบคุม ส่วนของแกน abscissa tav = t2 –t0 ตรงกับช่วงเวลานี้ในรูปที่ 2, ข. ในขณะนี้ t0 กระแสในขดลวดรีเลย์จะเพิ่มขึ้นเป็นค่าที่แรงแม่เหล็กไฟฟ้า Fe ที่กระทำต่อกระดองเริ่มต่อต้านแรงสปริง Fm (แรงเชิงกล) ของตัวกลาง ค่าที่ป้อนจะเรียกว่าค่าที่ยอมรับ
ระยะเวลาเริ่มต้นสอดคล้องกับส่วน ttr = t1 — t0 ที่เวลา t1 กระดองของแม่เหล็กไฟฟ้ารีเลย์จะเริ่มเคลื่อนที่ ระหว่าง tdv = t2 — t1 สมอจะเคลื่อนที่ เอาชนะแนวต้านของตัวกลาง B (ดูรูปที่ 1) และเปิดใช้งานตัวบริหาร C
ในตอนท้ายของจังหวะกระดอง หน้าสัมผัสของไดรฟ์จะปิดลง กระแสโหลดใน (รูปที่ 2, a) เริ่มเพิ่มขึ้นจากศูนย์เป็นค่าสมดุล ค่าอินพุตที่เริ่มควบคุมวงจรเอาต์พุตเรียกว่าค่าการยอมรับ (Iav) พลัง Psr ที่สอดคล้องกับ Isr เรียกว่าพลังกระตุ้น
เวลาตอบสนอง t cf = ttr + tdv
เวลาตอบสนองของรีเลย์แม่เหล็กไฟฟ้าแตกต่างกันไปตั้งแต่ 1-2 ถึง 20 มิลลิวินาที รีเลย์ตั้งเวลาแบบแม่เหล็กไฟฟ้าให้การหน่วงเวลาสูงสุด 10 วินาที
ในการประมาณเวลาตอบสนองของรีเลย์ อนุญาตให้ใช้นิพจน์ได้
เสื้อ cf = t1kz-bm –a,
โดยที่ t1 คือเวลาตอบสนองสำหรับปัจจัยด้านความปลอดภัยที่กำหนด ks และปัจจัย m = 1; a, b — ค่าสัมประสิทธิ์ที่กำหนดขึ้นอยู่กับประเภทของรีเลย์และค่าของ kz และ m
สำหรับรีเลย์ความเร็วสูงที่ kz = 1.5¸2 ค่าของสัมประสิทธิ์ a จะเข้าใกล้เอกภาพ สำหรับรีเลย์ธรรมดาที่มี k z = 1.5¸3 ค่า a = 0.25¸0.95 ค่าสัมประสิทธิ์ b มักจะอยู่ในช่วง 1.4-1.6
ระยะเวลาการทำงานของรีเลย์แม่เหล็กไฟฟ้า
 ระยะเวลาการทำงานรวมถึงช่วงเวลา twork = t3 — t2 เช่น เวลาจากช่วงเวลาของการควบคุมวงจรเอาต์พุต t2 จนถึงช่วงเวลาสิ้นสุดของการกระทบต่ออวัยวะที่ละเอียดอ่อนของสัญญาณอินพุต t3 กระแสเริ่มเพิ่มขึ้นเป็นค่าคงที่ของ Iwork (รูปที่ 2, b) — นี่คือค่าการทำงานของค่าอินพุตซึ่งทำให้การทำงานของรีเลย์เชื่อถือได้
ระยะเวลาการทำงานรวมถึงช่วงเวลา twork = t3 — t2 เช่น เวลาจากช่วงเวลาของการควบคุมวงจรเอาต์พุต t2 จนถึงช่วงเวลาสิ้นสุดของการกระทบต่ออวัยวะที่ละเอียดอ่อนของสัญญาณอินพุต t3 กระแสเริ่มเพิ่มขึ้นเป็นค่าคงที่ของ Iwork (รูปที่ 2, b) — นี่คือค่าการทำงานของค่าอินพุตซึ่งทำให้การทำงานของรีเลย์เชื่อถือได้
อัตราส่วน Iwork / Icr = kz เรียกว่าปัจจัยความปลอดภัยในการทำงาน
ในการระบุลักษณะความจุเกินขององค์ประกอบที่ละเอียดอ่อนของรีเลย์จะใช้ค่าของปริมาณอินพุตซึ่งเรียกว่าค่าขีด จำกัด ของปริมาณการทำงาน Ioperating.max
ข้อ จำกัด ของค่าการทำงาน - นี่คือค่าที่อวัยวะที่บอบบางสามารถทนต่อช่วงเวลาสั้น ๆ ที่เป็นมาตรฐาน อย่างไรก็ตาม ค่าของค่านี้ไม่สามารถยอมรับได้เมื่อรีเลย์ทำงานในโหมดปกติ เนื่องจากสภาพของความแข็งแรงทางไฟฟ้าหรือเชิงกลหรือความร้อน
แนวคิดกำลังควบคุม Ru ใช้เพื่อระบุความสามารถในการรับน้ำหนักของรีเลย์ไดรฟ์ กำลังควบคุมคือกำลังในวงจรควบคุมที่ไดรฟ์สามารถส่งได้เป็นเวลานาน
ช่วงการเดินทางของรีเลย์แม่เหล็กไฟฟ้า
 ช่วงเวลาปิดประกอบด้วยช่วงเวลาปิด = t6 — t3 เช่น เวลาจากช่วงเวลาของการหยุดผลกระทบต่ออวัยวะที่รับรู้ t3 จนถึงช่วงเวลาที่กระแสในวงจรควบคุมลดลงเป็นศูนย์ (รูปที่ 16, a)
ช่วงเวลาปิดประกอบด้วยช่วงเวลาปิด = t6 — t3 เช่น เวลาจากช่วงเวลาของการหยุดผลกระทบต่ออวัยวะที่รับรู้ t3 จนถึงช่วงเวลาที่กระแสในวงจรควบคุมลดลงเป็นศูนย์ (รูปที่ 16, a)
ช่วงปิดรวมถึงช่วงปล่อย totp = t4 — t3 ที่รีเลย์ปิดอยู่ กระแส iy ในคอยล์รีเลย์ลดลงเป็นศูนย์ (รูปที่ 2, b) ในช่วงเวลานี้ แรงสปริงตรงข้าม (แรงเชิงกล) เกินแรงแม่เหล็กไฟฟ้า เช่น Fm> Fe และกระดองถูกปล่อยออกมา
หลังจากเลือกหน้าสัมผัสที่ล้มเหลว (ช่วงเวลา tc = t5 — t4) หน้าสัมผัสรีเลย์จะเปิดขึ้นและส่วนโค้งจะติดไฟระหว่างกัน ซึ่งจะดับลงหลังจากเวลา td = t6 — t5 ในช่วง td กระแสในวงจรควบคุมจะลดลงจาก In เป็นศูนย์ (รูปที่ 2, a)
เวลาปิด t t = tp + tc + td
ระยะเวลาการสะดุดมีลักษณะเฉพาะโดยปัจจัยการกู้คืน ซึ่งเป็นอัตราส่วนของ Iotp กระแสตกต่อ Iav ของกระแสรับ: kv = Iotp / Icr
โดยทั่วไปแล้ว สำหรับรีเลย์ป้องกันระบบไฟฟ้าและรีเลย์ควบคุมที่ควบคุมพารามิเตอร์อินพุตภายในขีดจำกัดที่แคบ kv ควรใกล้เคียงกับความเป็นเอกภาพมากขึ้น
ช่วงเวลาพักของรีเลย์แม่เหล็กไฟฟ้า
ช่วงเวลาที่เหลือคือช่วงเวลา tp = t7 — t6
ระยะเวลาแฝงมีลักษณะเฉพาะด้วยพารามิเตอร์ที่เรียกว่าค่าไม่ทำงาน ซึ่งเป็นค่าที่ใหญ่ที่สุดของปริมาณอินพุตเพื่อให้แน่ใจว่ารีเลย์ไม่ทำงานหรือถูกระงับ เวลาปิดเครื่องจะสั้นกว่าเวลาเริ่มต้นทำงานและเวลาปล่อย
อัตราส่วนของกำลังควบคุมต่อกำลังกระตุ้นเรียกว่า อัตราขยาย ku = Py / Pcr
จำนวนของการเริ่มต้นต่อหน่วยเวลาถูกกำหนดโดยค่าที่แปรผกผันกับรอบเวลา:
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
ลาโกตา O.B.