เพลาไฟฟ้าและการประยุกต์ใช้ในไดรฟ์ไฟฟ้าของเครื่องตัดโลหะ
 บทความกล่าวถึงอุปกรณ์ หลักการทำงาน และตัวอย่างการใช้ระบบไฟฟ้าสำหรับการหมุนแบบซิงโครนัส (เพลาไฟฟ้า) ในเครื่องตัดโลหะและการติดตั้ง
บทความกล่าวถึงอุปกรณ์ หลักการทำงาน และตัวอย่างการใช้ระบบไฟฟ้าสำหรับการหมุนแบบซิงโครนัส (เพลาไฟฟ้า) ในเครื่องตัดโลหะและการติดตั้ง
สมมติว่าเพลาสองอันที่ไม่ได้เชื่อมต่อกันทางกลไกจะหมุนด้วยความเร็วเท่ากันโดยไม่ต้องหมุนสัมพันธ์กัน เพื่อให้แน่ใจว่าการหมุนแบบซิงโครนัสและในเฟสด้วยมอเตอร์ D1 และ D2 ซึ่งหมุนเพลา A และ II ตามลำดับ (รูปที่ 1) ให้เชื่อมต่อเครื่องอะซิงโครนัสเสริม A1 และ A2 กับโรเตอร์เฟส ขดลวดโรเตอร์ของเครื่องเหล่านี้เชื่อมต่อกัน
หากความเร็วในการหมุนของเครื่องจักรทั้งสองและตำแหน่งของโรเตอร์เท่ากัน แรงเคลื่อนไฟฟ้าที่เกิดขึ้นในขดลวดของโรเตอร์ของเครื่องจักร A1 และ A2 จะเท่ากันและพุ่งเข้าหากัน (รูปที่ 2, a) และ กระแสไม่ไหลในวงจรโรเตอร์
สมมติว่าทิศทางการหมุนของสนามของเครื่องช่วยนั้นตรงกับทิศทางการหมุนของโรเตอร์เมื่อการหมุนของเครื่องจักร A2 ช้าลง โรเตอร์ของมันจะล้าหลังกว่าของ A1 ส่งผลให้ e เป็นต้น c. Ep2 ที่เหนี่ยวนำในขดลวดโรเตอร์จะเปลี่ยนเฟสเป็นเฟสล่วงหน้า (รูปที่ 2, b) และในวงจรโรเตอร์ของเครื่องจักร A1 และ A2 ภายใต้การกระทำของผลรวมเวกเตอร์ของ e เป็นต้น ด้วย E กระแส Az ที่เท่ากันจะปรากฏขึ้น
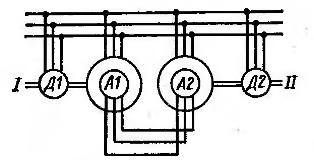
ข้าว. 1. รูปแบบของการสื่อสารแบบซิงโครนัส
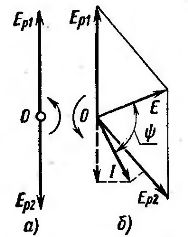
ข้าว. 2. แผนภาพเวกเตอร์ของระบบการสื่อสารแบบซิงโครนัส
เวกเตอร์ปัจจุบัน I จะล้าหลังเวกเตอร์ e เป็นต้น ด้วย E ในมุม φ... การฉายเวกเตอร์ปัจจุบัน Az ไปยังเวกเตอร์ e ฯลฯ v. Ep2 ตรงกับเวกเตอร์นี้ในทิศทาง. การฉายภาพของเวกเตอร์ปัจจุบันไปยังเวกเตอร์ e เป็นต้น pp. Ep1 พุ่งเป้ามาที่เขา. ตามนั้นเครื่อง A2 จะทำงานในโหมดเครื่องยนต์และเครื่อง A1 ในโหมดเครื่องกำเนิดไฟฟ้า ในกรณีนี้ เพลาของเครื่อง A2 จะถูกเร่งและเพลาของเครื่อง A1 จะถูกลดความเร็วลง ด้วยวิธีนี้ เครื่องจักรจะพัฒนาแรงบิดที่คืนค่าการหมุนแบบซิงโครนัสของเพลา I และ II และตำแหน่งที่ประสานกันก่อนหน้านี้ในช่องว่างของโรเตอร์ของเครื่องจักร A1 และ A2 โรเตอร์ของเครื่องเหล่านี้สามารถหมุนได้ทั้งในทิศทางการหมุนของสนามและในทิศทางตรงกันข้าม
ระบบนี้เรียกว่าระบบการหมุนแบบซิงโครนัสไฟฟ้า… เรียกอีกอย่างว่าเพลาไฟฟ้า… ระบบการหมุนแบบซิงโครนัสสามารถแทนที่ได้ เช่น ลีดสกรูในเครื่องกลึงตัดสกรู
เนื่องจากวงจรฟีดของเครื่องตัดโลหะ เมื่อเทียบกับวงจรของการเคลื่อนไหวหลัก มักจะใช้พลังงานต่ำ จึงสามารถใช้รูปแบบการหมุนแบบซิงโครนัสที่ง่ายกว่าเพื่อซิงโครไนซ์การเคลื่อนไหวหลักกับฟีด (รูปที่ 3)ในกรณีนี้ ตำแหน่งของโรเตอร์ของเครื่องจักร A1 และ A2 ที่ไม่สอดคล้องกันเป็นสิ่งที่หลีกเลี่ยงไม่ได้ หากไม่มีกระแสไฟฟ้าในวงจรโรเตอร์ของเครื่องจักร A2 ก็จะไม่สามารถเอาชนะโมเมนต์ของแรงต้านของ วงจรจ่ายไฟ เนื่องจากเครื่อง A2 ได้รับพลังงานจากสเตเตอร์และโรเตอร์ ระบบเพลาไฟฟ้านี้จึงต้องการการเชื่อมต่อแบบหกสายเข้ากับมอเตอร์ ซึ่งติดตั้งในหลายกรณีบนบล็อกเครื่องจักรที่เคลื่อนที่ได้ ซึ่งมักจะแสดงในรูปเส้นประ
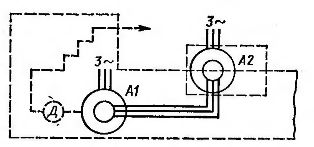
ข้าว. 3. ระบบสื่อสารแบบซิงโครนัสของเครื่องกลึงเกลียวหนัก
ภายในส่วนเบี่ยงเบนเชิงมุมซึ่งไม่เกิน 90 ° โมเมนต์ซิงโครไนซ์ไฟฟ้าจะเพิ่มขึ้น เพื่อให้แน่ใจว่ามีแรงบิดในการซิงโครไนซ์ที่สำคัญ เครื่องสื่อสารแบบซิงโครนัสที่ความถี่การหมุนเชิงมุมที่เป็นไปได้ทั้งหมดจะต้องทำงานด้วยสลิปขนาดใหญ่ (ไม่น้อยกว่า 0.3 — 0.5) ดังนั้นเครื่องเหล่านี้จะต้องมีขนาดใหญ่พอที่จะหลีกเลี่ยงความร้อนที่ไม่สามารถยอมรับได้
กำลังของเครื่องจักรเพิ่มขึ้นอีกเพื่อพยายามขจัดอิทธิพลของความผันผวนของโหลดและแรงเสียดทาน นอกจากนี้ยังใช้การส่งสัญญาณทางกลซึ่งลดความถี่ของการหมุนของเพลาเครื่องจักรและดังนั้นขนาดของข้อผิดพลาดเชิงมุมจึงลดลงไปที่เพลาของเครื่องจักรก่อนที่จะเริ่มการทำงานของเพลาไฟฟ้าเครื่องอะซิงโครนัส A1 และ A2 จะเชื่อมต่อกับ แหล่งจ่ายไฟเฟสเดียว ในกรณีนี้ โรเตอร์ของเครื่อง A2 จะอยู่ในตำแหน่งเริ่มต้น ซึ่งสอดคล้องกับตำแหน่งของโรเตอร์ของเครื่อง A1
ระบบการหมุนแบบซิงโครนัสถูกนำมาใช้อย่างมีเหตุผลสำหรับเครื่องตัดโลหะหนัก เนื่องจากการผลิตลีดสกรูแบบยาวนั้นเกี่ยวข้องกับปัญหาอย่างมากนอกจากนี้ เมื่อความยาวของสกรูหรือเพลาเพิ่มขึ้นเนื่องจากการบิด ความแม่นยำของการประสานงานของการจัดเรียงร่วมกันของชิ้นส่วนเครื่องจักรจะลดลง ในระบบเพลาไฟฟ้า ระยะห่างระหว่างเพลาจะไม่ส่งผลต่อความแม่นยำในการทำงาน
เมื่อใช้เพลาไฟฟ้า การเชื่อมต่อเชิงกลของคาลิปเปอร์กับแกนหมุนจะถูกตัดออก และแผนภาพจลนศาสตร์จะง่ายขึ้นอย่างมาก ข้อเสียที่สำคัญของระบบเพลาไฟฟ้าในเครื่องตัดโลหะหนักคือความเป็นไปได้ที่จะเกิดความเสียหายกับชิ้นส่วนที่มีราคาแพงในระหว่างที่ไฟฟ้าขัดข้อง เนื่องจากการเยื้องศูนย์จะเกิดขึ้นทันที ในบางกรณี อุบัติเหตุดังกล่าว ความเสียหายต่อชิ้นงานสามารถป้องกันได้โดยการดึงเครื่องมือกลับอัตโนมัติอย่างรวดเร็ว
โครงร่างที่มีมอเตอร์แบบอะซิงโครนัสสองตัวที่เหมือนกันพร้อมเฟสโรเตอร์เป็นสิ่งที่น่าสนใจสำหรับวิศวกรรมเครื่องกล (รูปที่ 4) เนื่องจากวงจรของโรเตอร์ทั้งสองปิดอยู่กับรีโอสแตท R เมื่อมอเตอร์เชื่อมต่อกับไฟหลัก AC โรเตอร์ทั้งสองจึงเริ่มหมุน
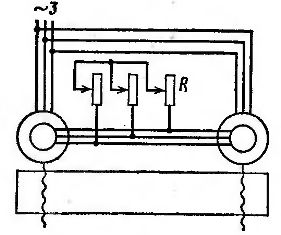
ข้าว. 4. รูปแบบการสื่อสารแบบซิงโครนัสกับรีโอสแตทแบบหมุน
นอกจากกระแสที่ไหลในขดลวดของโรเตอร์และรีโอสแตทแล้ว กระแสที่ไหลเท่ากันจะไหลในวงจรโรเตอร์ของเครื่องจักรทั้งสอง การปรากฏตัวของกระแสนี้ทำให้เกิดแรงบิดซิงโครไนซ์ซึ่งเป็นผลมาจากการที่เครื่องจักรหมุนพร้อมกัน ระบบนี้สามารถใช้เพื่อยกและลดแขนไขว้ของเครื่องไสขนาดใหญ่ เครื่องเร้าเตอร์ และเครื่องหมุน
ด้วยระบบเพลาไฟฟ้า ปัญหาของการเคลื่อนที่ประสานกันของสายพานที่เป็นส่วนหนึ่งของศูนย์การผลิตจึงได้รับการแก้ไขการใช้งานจริงในกรณีนี้ได้มาจากตัวแปรของการหมุนแบบซิงโครนัสของมอเตอร์ด้วยตัวแปลงความถี่ทั่วไป
นอกเหนือจากการพิจารณาระบบเพลาไฟฟ้าสำหรับการสร้างเครื่องจักรแล้ว ระบบเครื่องจักรไฟฟ้ากระแสสลับอื่นๆ ยังได้รับการพัฒนาและใช้งาน รวมถึงระบบเฟสเดียวและระบบที่มีมอเตอร์ซิงโครนัสที่มีโครงสร้างพิเศษ