รูปแบบโครงสร้างของมอเตอร์แบบอะซิงโครนัส
 รูปแบบโครงสร้างภายนอก มอเตอร์แบบอะซิงโครนัส ถูกกำหนดโดยวิธีติดตั้งเครื่องยนต์และรูปแบบการป้องกันจากอิทธิพลของสิ่งแวดล้อม ประสิทธิภาพของมอเตอร์ขาปกตินั้นแพร่หลาย (รูปที่ 1, a) ในกรณีนี้ เพลามอเตอร์จะต้องอยู่ในแนวนอน เครื่องยนต์ที่มีหน้าแปลน (รูปที่ 1, b) ใช้กันอย่างแพร่หลายสำหรับการติดตั้งในแนวนอนและแนวตั้ง
รูปแบบโครงสร้างภายนอก มอเตอร์แบบอะซิงโครนัส ถูกกำหนดโดยวิธีติดตั้งเครื่องยนต์และรูปแบบการป้องกันจากอิทธิพลของสิ่งแวดล้อม ประสิทธิภาพของมอเตอร์ขาปกตินั้นแพร่หลาย (รูปที่ 1, a) ในกรณีนี้ เพลามอเตอร์จะต้องอยู่ในแนวนอน เครื่องยนต์ที่มีหน้าแปลน (รูปที่ 1, b) ใช้กันอย่างแพร่หลายสำหรับการติดตั้งในแนวนอนและแนวตั้ง
พวกเขายังผลิตมอเตอร์เหนี่ยวนำแบบอินไลน์ที่ไม่มีโครง, แผ่นปิดปลาย, เพลา ส่วนประกอบต่างๆ ของมอเตอร์ดังกล่าวฝังอยู่ในส่วนต่างๆ ของตัวเครื่อง และเพลามอเตอร์เป็นหนึ่งในเพลาของเครื่องจักร (มักจะเป็นแกนหมุน) และเตียงเป็นส่วนประกอบของตัวเครื่อง เช่น หัวเจียร (รูปที่ . 2).
มอเตอร์การออกแบบพิเศษมีจำหน่ายอย่างกว้างขวางในต่างประเทศ รวมถึงมอเตอร์ที่มีขนาดรัศมีขนาดเล็กและมีความยาวมาก และมอเตอร์แบบจาน โดยเฉพาะอย่างยิ่งกับสเตเตอร์รูปทรงกระบอกและโรเตอร์ด้านนอกรูปวงแหวน นอกจากนี้ยังใช้มอเตอร์เมื่อเปิดเครื่อง โรเตอร์ซึ่งมีรูปร่างเป็นกรวยจะเคลื่อนที่ในแนวแกน ทำให้เกิดแรงขับดันที่สำคัญ
แรงนี้ใช้เพื่อคลายเบรกเชิงกลที่กระทำกับเพลามอเตอร์หลังจากถอดมอเตอร์ออกจากแหล่งจ่ายไฟหลัก นอกจากนี้ การออกแบบเครื่องยนต์จำนวนมากใช้กับชุดเกียร์ กระปุกเกียร์ และชุดแปรผันเชิงกลที่ให้การควบคุมที่ราบรื่น
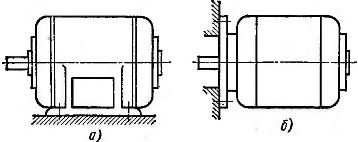
ข้าว. 1. การออกแบบมอเตอร์แบบอะซิงโครนัส
ข้อเสียของการใช้เครื่องยนต์ที่มีรูปแบบการออกแบบพิเศษคือความยากลำบากในการเปลี่ยนเครื่องยนต์ในกรณีที่เกิดอุบัติเหตุ ไม่ควรเปลี่ยนมอเตอร์ไฟฟ้าที่ชำรุด แต่ควรซ่อมแซม และเครื่องเดินเบาระหว่างการซ่อมแซม
เครื่องยนต์ที่มีการปกป้องสิ่งแวดล้อมในรูปแบบต่างๆ ถูกนำมาใช้ในการขับเคลื่อนเครื่องจักร
มอเตอร์ที่มีตัวป้องกันมีตะแกรงที่ปิดช่องระบายอากาศที่ส่วนท้าย สิ่งนี้จะช่วยป้องกันสิ่งแปลกปลอมไม่ให้เข้าไปในเครื่องยนต์ และยังป้องกันไม่ให้ผู้ปฏิบัติงานสัมผัสกับชิ้นส่วนที่หมุนและมีไฟฟ้า เพื่อป้องกันไม่ให้หยดของเหลวตกลงมาจากด้านบน เครื่องยนต์จึงติดตั้งช่องระบายอากาศด้านล่างหรือแนวตั้ง
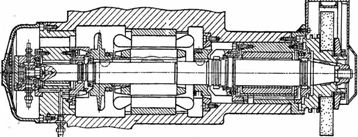
ข้าว. 2. มอเตอร์เจียรในตัว
อย่างไรก็ตาม เมื่อมอเตอร์ไฟฟ้าดังกล่าวทำงานในโรงงาน พัดลมพร้อมกับอากาศจะดูดฝุ่น ฉีดสารหล่อเย็นหรือน้ำมัน ตลอดจนอนุภาคขนาดเล็กของเหล็กหรือเหล็กหล่อ ซึ่งเกาะติดกับฉนวนของขดลวดและแรงสั่นสะเทือน ภายใต้อิทธิพลของสนามแม่เหล็กสลับทำให้ฉนวนสึกหรออย่างรวดเร็ว
เครื่องยนต์แบบปิดซึ่งแผงท้ายไม่มีรูระบายอากาศจะมีการป้องกันที่เชื่อถือได้มากกว่าจากอิทธิพลของสิ่งแวดล้อม เครื่องยนต์ดังกล่าวที่มีขนาดเท่ากันกับเครื่องยนต์ที่ได้รับการป้องกันเนื่องจากการระบายความร้อนไม่ดีจึงมีกำลังน้อยกว่าด้วยพลังและความเร็วที่เท่ากัน มอเตอร์ไฟฟ้าแบบปิดจะหนักกว่ามอเตอร์ที่ได้รับการป้องกัน 1.5-2 เท่า ดังนั้นราคาจึงสูงกว่า
ความปรารถนาที่จะลดขนาดและต้นทุนของมอเตอร์แบบปิดนำไปสู่การสร้างมอเตอร์ไฟฟ้าแบบเป่าลมแบบปิด มอเตอร์ไฟฟ้าดังกล่าวมีพัดลมภายนอกติดตั้งอยู่ที่ส่วนท้ายของเพลามอเตอร์ตรงข้ามกับส่วนท้ายของไดรฟ์และปิดด้วยฝาปิด พัดลมนี้จะเป่ารอบๆ ตัวเรือนมอเตอร์
มอเตอร์พัดลมมีน้ำหนักเบาและราคาถูกกว่ามอเตอร์แบบปิดอย่างมาก มอเตอร์เป่ามักใช้เพื่อขับเคลื่อนเครื่องตัดโลหะ เครื่องยนต์ที่มีการปกป้องสิ่งแวดล้อมในรูปแบบอื่นๆ นั้นค่อนข้างจะไม่ค่อยได้ใช้ในการขับเคลื่อนเครื่องตัดโลหะ โดยเฉพาะอย่างยิ่ง บางครั้งใช้มอเตอร์ไฟฟ้าแบบปิดเพื่อขับเคลื่อนเครื่องบด
มอเตอร์ไฟฟ้าออกแบบมาสำหรับแรงดันไฟฟ้ามาตรฐาน 127, 220 และ 380 V มอเตอร์ตัวเดียวกันสามารถเชื่อมต่อกับเครือข่ายที่มีแรงดันไฟฟ้าต่างกันได้ เช่น เข้ากับเครือข่ายที่มีแรงดันไฟฟ้า 127 และ 220 V, 220 และ 380 V ด้วยแรงดันไฟฟ้า 2 ระดับ สเตเตอร์ที่คดเคี้ยวของมอเตอร์ไฟฟ้าเชื่อมต่อเป็นรูปสามเหลี่ยมสำหรับอันที่ใหญ่กว่า - ในดาว กระแสในขดลวดของมอเตอร์ไฟฟ้าและแรงดันไฟฟ้าในนั้นจะเท่ากันในทั้งสองกรณีด้วยการรวมนี้ นอกจากนี้ยังผลิตมอเตอร์ไฟฟ้า 500 V สเตเตอร์เชื่อมต่ออย่างถาวรในดาวฤกษ์
มอเตอร์แบบกรงกระรอกแบบอะซิงโครนัสที่ใช้ในอุตสาหกรรมหลายประเภทผลิตด้วยกำลังไฟพิกัด 0.6-100 กิโลวัตต์ต่อ ความเร็วซิงโครนัส 600, 750, 1,000, 1500 และ 3000 รอบต่อนาที
ส่วนตัดขวางของขดลวดของมอเตอร์ไฟฟ้าขึ้นอยู่กับขนาดของกระแสที่ไหลผ่าน ด้วยกระแสไฟฟ้าที่มากขึ้น ขดลวดของมอเตอร์จะมีปริมาตรที่มากขึ้นส่วนตัดขวางของวงจรแม่เหล็กเป็นสัดส่วนกับขนาดของฟลักซ์แม่เหล็ก ด้วยวิธีนี้ ขนาดของมอเตอร์ไฟฟ้าจะถูกกำหนดโดยค่าที่คำนวณได้ของกระแสและฟลักซ์แม่เหล็กหรือแรงบิดสูงสุดของมอเตอร์ไฟฟ้า กำลังเครื่องยนต์จัดอันดับ

โดยที่ P.n — กำลังไฟ, kW, Mn- โมเมนต์เล็กน้อย, N • m, nn- ความเร็วเล็กน้อย, รอบต่อนาที
กำลังไฟสำหรับเครื่องยนต์ขนาดเดียวกันจะเพิ่มขึ้นตามความเร็วพิกัดที่เพิ่มขึ้น ดังนั้นมอเตอร์ไฟฟ้าความเร็วต่ำจึงมีขนาดใหญ่กว่ามอเตอร์ความเร็วสูงที่มีกำลังเท่ากัน
เมื่อทำการเจียรรูขนาดเล็ก ต้องใช้ความเร็วแกนหมุนการเจียรที่สูงมากเพื่อให้ได้ความเร็วตัดที่เพียงพอ ดังนั้นเมื่อเจียรด้วยล้อที่มีเส้นผ่านศูนย์กลาง 3 มม. ที่ความเร็วเพียง 30 ม./วินาที ความเร็วของแกนหมุนควรเท่ากับ 200,000 รอบต่อนาที ที่ความเร็วสปินเดิลสูง แรงหนีบจะลดลงอย่างมาก ในเวลาเดียวกัน การเจียรล้อและการดัดแกนล้อจะลดลง และผิวสำเร็จและความแม่นยำในการตัดเฉือนก็เพิ่มขึ้นด้วย
จากที่กล่าวมาข้างต้น อุตสาหกรรมนี้ใช้โมเดลหลายรุ่นที่เรียกว่า แกนไฟฟ้าที่มีความเร็วรอบการหมุนตั้งแต่ 12,000-144,000 รอบต่อนาทีขึ้นไป อิเล็กโทรสปินเดิล (รูปที่ 3, a) เป็นแกนหมุนบดบนตลับลูกปืนที่มีมอเตอร์กรงกระรอกความถี่สูงในตัว โรเตอร์ของมอเตอร์ตั้งอยู่ระหว่างตลับลูกปืนสองตัวที่ส่วนท้ายของแกนหมุนตรงข้ามกับล้อเจียร
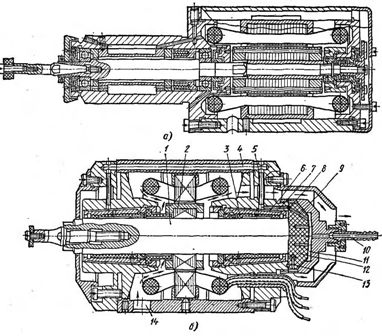
ข้าว. 3. อิเล็กโทรสปินเดิล
สเตเตอร์แกนหมุนไฟฟ้าประกอบขึ้นจากแผ่นเหล็กไฟฟ้า มีขดลวดไบโพลาร์วางอยู่โรเตอร์ของมอเตอร์ที่ความเร็วสูงสุด 30,000-50,000 รอบต่อนาทียังหมุนจากแผ่นโลหะและมาพร้อมกับขดลวดลัดวงจรทั่วไป พวกเขามักจะลดขนาดเส้นผ่านศูนย์กลางของโรเตอร์ให้ได้มากที่สุด
การเลือกประเภทตลับลูกปืนมีความสำคัญอย่างยิ่งต่อการทำงานของอิเล็กโทรสปินเดิล โดยทั่วไปจะใช้ตลับลูกปืนแบบแม่นยำซึ่งทำงานด้วยพรีโหลดที่สร้างขึ้นโดยใช้สปริงที่ปรับเทียบแล้ว ตลับลูกปืนดังกล่าวใช้สำหรับความเร็วในการหมุนที่ไม่เกิน 100,000 รอบต่อนาที
ตลับลูกปืนแอโรสแตติกใช้กันอย่างแพร่หลายในอุตสาหกรรม (รูปที่ 3, ข) เพลา 1 ของมอเตอร์ไฟฟ้าความถี่สูงหมุนในตลับลูกปืนที่หล่อลื่นด้วยอากาศ 3 โหลดตามแนวแกนถูกดูดซับโดยเบาะลมระหว่างปลายเพลาและแบริ่งรองรับ 12 โดยที่เพลาถูกกดภายใต้แรงดันของอากาศที่จ่ายให้กับภายในตัวเรือนผ่านรู 14 เพื่อระบายความร้อนของเครื่องยนต์ อากาศอัดผ่านตัวกรองและเข้าสู่ข้อต่อ 10 ในห้อง 11 จากที่นี่ผ่านช่อง 9 และร่องวงกลม 8 อากาศจะผ่านเข้าไปในช่อง 7 และห้อง 6 จากนั้นอากาศจะเข้าสู่ตลับลูกปืน ช่องว่าง อากาศถูกส่งไปยังตลับลูกปืนด้านซ้ายผ่านท่อ 5 และช่อง 4 ในตัวเรือนเครื่องยนต์
อากาศเสียถูกระบายออกทางช่อง 13 เบาะลมในช่องว่างตลับลูกปืนรองรับถูกสร้างขึ้นโดยอากาศที่ไหลผ่านจากช่อง 11 ผ่านตลับลูกปืนที่ทำจากกราไฟต์คาร์บอนที่มีรูพรุน ตลับลูกปืนแต่ละอันมีทองเหลืองเรียว ซับคาร์บอนกราไฟต์ถูกกดลงไปซึ่งรูพรุนนั้นเต็มไปด้วยบรอนซ์ ก่อนสตาร์ทอิเล็กโทรสปินเดิล จะมีการจ่ายอากาศและเบาะลมจะถูกสร้างขึ้นระหว่างสปินเดิลและบุชชิ่ง สิ่งนี้จะช่วยลดแรงเสียดทานและการสึกหรอของตลับลูกปืนระหว่างการสตาร์ทหลังจากนั้นมอเตอร์จะเปิดทำงาน ความเร็วของโรเตอร์ 2 ถึงความเร็วที่กำหนดใน 5-10 วินาที เมื่อดับเครื่องยนต์ โรเตอร์ 2 จะเคลื่อนที่เป็นเวลา 3-4 นาที เพื่อลดเวลานี้ ใช้เบรกไฟฟ้า
การใช้ถุงลมช่วยลดการสูญเสียแรงเสียดทานในแกนหมุนไฟฟ้าได้อย่างมาก ปริมาณการใช้อากาศอยู่ที่ 6-25 ลบ.ม./ชม.
นอกจากนี้ยังใช้อิเล็กโทรสปินเดิลบนตลับลูกปืนที่มีการหล่อลื่นด้วยของเหลวอีกด้วย การทำงานของพวกเขาต้องการการไหลเวียนของน้ำมันอย่างต่อเนื่องภายใต้แรงดันสูงมิฉะนั้นความร้อนของตลับลูกปืนจะไม่เป็นที่ยอมรับ
การผลิตมอเตอร์ไฟฟ้าความถี่สูงต้องการการผลิตชิ้นส่วนแต่ละชิ้นอย่างแม่นยำ การปรับสมดุลไดนามิกของโรเตอร์ การประกอบที่แม่นยำ และการรับประกันความสม่ำเสมอที่เข้มงวดของช่องว่างระหว่างสเตเตอร์และโรเตอร์ ความถี่ของกระแสไฟฟ้าที่จ่ายให้กับมอเตอร์ไฟฟ้าความถี่สูงจะถูกเลือกขึ้นอยู่กับความเร็วที่ต้องการของมอเตอร์ไฟฟ้า:

โดยที่ nหากความถี่ของการหมุนของมอเตอร์ไฟฟ้าแบบซิงโครนัส, รอบต่อนาที, f คือความถี่ของกระแส, Hz, p คือจำนวนขั้วเนื่องจาก p = 1 ดังนั้น

ที่ความเร็วการหมุนแบบซิงโครนัสของแกนไฟฟ้า 12,000 และ 120,000 รอบต่อนาที ความถี่ปัจจุบันควรเท่ากับ 200 และ 2000 Hz ตามลำดับ
เครื่องกำเนิดไฟฟ้าพิเศษใช้เพื่อขับเคลื่อนมอเตอร์ความถี่สูง ในรูป 4 แสดงเครื่องกำเนิดการเหนี่ยวนำแบบซิงโครนัสสามเฟส สเตเตอร์ของเครื่องกำเนิดไฟฟ้ามีช่องกว้างและแคบ ขดลวดสนามซึ่งอยู่ในช่องกว้างของสเตเตอร์นั้นจ่ายกระแสไฟตรง สนามแม่เหล็กของตัวนำของขดลวดนี้ถูกปิดผ่านฟันของสเตเตอร์และส่วนที่ยื่นออกมาของโรเตอร์ดังแสดงในรูป 4 ด้วยเส้นประ
เมื่อโรเตอร์หมุน สนามแม่เหล็กที่เคลื่อนที่ไปตามส่วนที่ยื่นออกมาของโรเตอร์จะตัดกับกระแสสลับที่คดเคี้ยวอยู่ในช่องแคบของสเตเตอร์และทำให้เกิดการสลับกัน เป็นต้น ค. ความถี่ของสิ่งนี้จ. เป็นต้น v. ขึ้นอยู่กับความเร็วและจำนวนของหูโรเตอร์. แรงเคลื่อนไฟฟ้าที่เกิดจากฟลักซ์เดียวกันในขดลวดสนามจะหักล้างกันเนื่องจากการเปิดใช้งานของขดลวดที่กำลังจะเกิดขึ้น ฟิลด์คอยล์ใช้พลังงานจากวงจรเรียงกระแสที่เชื่อมต่อกับแหล่งจ่ายไฟหลัก สเตเตอร์และโรเตอร์มีแกนแม่เหล็กที่ทำจากแผ่นเหล็กไฟฟ้า
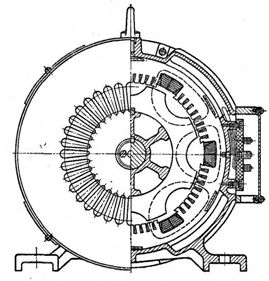
ข้าว. 4. เครื่องกำเนิดไฟฟ้าเหนี่ยวนำความถี่สูง
เครื่องกำเนิดไฟฟ้าที่มีการออกแบบตามที่อธิบายไว้ผลิตขึ้นสำหรับกำลังไฟฟ้าที่กำหนดตั้งแต่ 1 ถึง 3 กิโลวัตต์และความถี่ตั้งแต่ 300 ถึง 2400 Hz เครื่องกำเนิดไฟฟ้าขับเคลื่อนด้วยมอเตอร์แบบอะซิงโครนัสด้วยความเร็วซิงโครนัส 3,000 รอบต่อนาที
เครื่องกำเนิดไฟฟ้าเหนี่ยวนำที่มีความถี่เพิ่มขึ้นเริ่มถูกแทนที่ด้วยตัวแปลงเซมิคอนดักเตอร์ (ไทริสเตอร์) ในกรณีนี้มักจะให้ความสามารถในการเปลี่ยนความถี่ของกระแสและทำให้สามารถปรับความเร็วรอบของมอเตอร์ไฟฟ้าได้ หากในระหว่างการควบคุมดังกล่าวแรงดันไฟฟ้าคงที่ การควบคุมพลังงานคงที่จะดำเนินการ หากอัตราส่วนของแรงดันต่อความถี่ของกระแส (และดังนั้นฟลักซ์แม่เหล็กของมอเตอร์) คงที่ การควบคุมจะดำเนินการด้วยค่าคงที่ที่ความเร็วทั้งหมดเป็นระยะเวลานาน แรงบิดที่อนุญาต
ข้อดีของไดรฟ์ที่มีตัวแปลงความถี่ไทริสเตอร์และมอเตอร์กรงกระรอกแบบอะซิงโครนัสคือประสิทธิภาพสูงและใช้งานง่าย ข้อเสียยังคงเป็นราคาที่สูงในวิศวกรรมเครื่องกล ขอแนะนำให้ใช้ไดรฟ์ดังกล่าวสำหรับมอเตอร์ความถี่สูง ไดรฟ์ทดลองประเภทนี้ถูกสร้างขึ้นในประเทศของเรา
มอเตอร์แบบอะซิงโครนัสสองเฟสกำลังต่ำมักใช้ในไดรฟ์ผู้บริหารเครื่องมือกล สเตเตอร์ของมอเตอร์ดังกล่าวมีสองขดลวด: ขดลวดสนาม 1 และขดลวดควบคุม 2 (รูปที่ 5, a) Rotor 4 ในกรงกระรอกมีความต้านทานสูง แกนของขดลวดตั้งฉากกัน
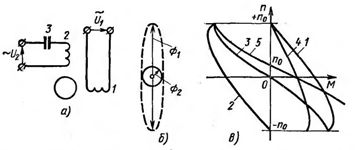
ข้าว. 5. แผนผังของมอเตอร์เหนี่ยวนำสองเฟสและคุณลักษณะของมัน
แรงดันไฟฟ้า Ul และ U2 ถูกนำไปใช้กับขดลวด เมื่อตัวเก็บประจุ 3 เชื่อมต่อกับวงจรของขดลวด 2 กระแสในนั้นเกินกระแสในขดลวด 1 ในกรณีนี้สนามแม่เหล็กรูปวงรีหมุนจะเกิดขึ้นและโรเตอร์ 4 ของกระรอกเริ่มหมุน หากคุณลดแรงดัน U2 กระแสในขดลวด 2 ก็จะลดลงเช่นกัน สิ่งนี้จะนำไปสู่การเปลี่ยนแปลงรูปร่างของวงรีของสนามแม่เหล็กที่หมุนซึ่งจะยาวขึ้นเรื่อย ๆ (รูปที่ 5, b)
มอเตอร์สนามวงรีสามารถพิจารณาได้ว่าเป็นมอเตอร์สองตัวบนเพลาหนึ่ง อันหนึ่งทำงานกับสนามพัลส์ F1 และอีกอันหนึ่งมีสนามวงกลม F2 มอเตอร์แบบสนามพัลซิ่งของ F1 เปรียบได้กับมอเตอร์เหนี่ยวนำแบบสนามวงกลมที่เหมือนกันสองตัวที่ต่อสายเพื่อหมุนในทิศทางตรงกันข้าม
ในรูป 5, c แสดงลักษณะทางกล 1 และ 2 ของมอเตอร์เหนี่ยวนำที่มีสนามหมุนเป็นวงกลมและความต้านทานเชิงแอคทีฟที่สำคัญของโรเตอร์เมื่อหมุนในทิศทางต่างๆ คุณลักษณะเชิงกล 3 ของมอเตอร์เฟสเดียวสามารถสร้างขึ้นได้โดยการลบโมเมนต์ M ของคุณลักษณะ 1 และ 2 สำหรับแต่ละค่าของ nที่ค่า n ใดๆ แรงบิดของมอเตอร์เฟสเดียวที่มีความต้านทานโรเตอร์สูงจะหยุดลง ลักษณะทางกลของมอเตอร์สนามแบบวงกลมแสดงด้วยเส้นโค้ง 4
คุณลักษณะเชิงกล 5 ของมอเตอร์สองเฟสสามารถสร้างขึ้นได้โดยการลบโมเมนต์ M ของคุณลักษณะ 3 และ 4 ที่ค่า n ใดๆ ค่า n0 คือความเร็วรอบของมอเตอร์เหนี่ยวนำสองเฟสที่ความเร็วรอบเดินเบาในอุดมคติ โดยการปรับกระแสจ่ายของขดลวด 2 (รูปที่ 5, a) คุณสามารถเปลี่ยนความชันของลักษณะ 4 (รูปที่ 5, c) และด้วยเหตุนี้ค่า n0 ด้วยวิธีนี้การควบคุมความเร็วของมอเตอร์เหนี่ยวนำสองเฟสจะดำเนินการ
เมื่อทำงานด้วยค่าสลิปสูง การสูญเสียในโรเตอร์จะค่อนข้างสำคัญ ด้วยเหตุผลนี้ กฎข้อบังคับที่พิจารณาจึงใช้สำหรับไดรฟ์เสริมที่ใช้พลังงานต่ำเท่านั้น เพื่อลดเวลาการเร่งความเร็วและการลดความเร็ว จะใช้มอเตอร์เหนี่ยวนำสองเฟสที่มีโรเตอร์กลวง ในเครื่องยนต์ดังกล่าว โรเตอร์เป็นกระบอกกลวงอลูมิเนียมที่มีผนังบาง