วิธีสร้างและดำเนินโครงการติดตั้งไฟฟ้าขนาดเล็กด้วยตัวคุณเอง
 ในกระบวนการดำเนินการติดตั้งระบบไฟฟ้าหรือปรับปรุงการทำงานของอุปกรณ์ บางครั้งจำเป็นต้องดำเนินการติดตั้งและว่าจ้างงานขนาดเล็กอย่างอิสระโดยไม่ต้องมีส่วนร่วมขององค์กรพิเศษที่ดำเนินโครงการติดตั้งระบบไฟฟ้าเหล่านี้เพื่อสั่งการติดตั้งในภายหลัง
ในกระบวนการดำเนินการติดตั้งระบบไฟฟ้าหรือปรับปรุงการทำงานของอุปกรณ์ บางครั้งจำเป็นต้องดำเนินการติดตั้งและว่าจ้างงานขนาดเล็กอย่างอิสระโดยไม่ต้องมีส่วนร่วมขององค์กรพิเศษที่ดำเนินโครงการติดตั้งระบบไฟฟ้าเหล่านี้เพื่อสั่งการติดตั้งในภายหลัง
ก่อนเริ่มงานเหล่านี้จำเป็นต้องสร้างความได้เปรียบจากนั้นกำหนดงานอย่างชัดเจนรวบรวมข้อมูลเริ่มต้นกำหนดขอบเขตของอุปกรณ์อุปกรณ์ผลิตภัณฑ์สายเคเบิลและสายไฟวัสดุการติดตั้ง ฯลฯ คิดเกี่ยวกับสถานที่ติดตั้งอุปกรณ์ไฟฟ้า เชื่อมต่อกับเครือข่ายไฟฟ้าและโหมดการทำงานฉุกเฉิน ปัญหาด้านความปลอดภัยทางไฟฟ้า ต้นทุนการทำงาน
การออกแบบเป็นกระบวนการที่สร้างสรรค์และไม่สามารถควบคุมอย่างเข้มงวดได้ แต่จำเป็นต้องคำนึงถึงข้อจำกัดและแนวทางต่างๆ ที่ระบุไว้ในเอกสารเชิงบรรทัดฐานและเอกสารอ้างอิงต่างๆ และเงื่อนไขในท้องถิ่นสำหรับการดำเนินโครงการนี่คือชุดเอกสารที่เป็นพื้นฐานและกำหนดกระบวนการทั้งหมดของการออกแบบ การติดตั้ง และการใช้งานอุปกรณ์ไฟฟ้า: กฎสำหรับการติดตั้งไฟฟ้า (PUE), บรรทัดฐานและกฎการก่อสร้าง (SNiP), กฎสำหรับการปฏิบัติงานด้านเทคนิค (PTE), กฎความปลอดภัย (PTB)
การออกแบบนั้นประกอบด้วยขั้นตอนบังคับหลายขั้นตอน อันดับแรกคือการกำหนดและเตรียมการมอบหมายงาน การกำหนดปัญหาดำเนินการโดยพนักงานบริการที่เกี่ยวข้อง เช่น ช่างเครื่อง นักเทคโนโลยี เป็นต้น หากเกี่ยวข้องกับการปรับปรุงการติดตั้งระบบไฟฟ้าเองช่างไฟฟ้าจะดำเนินการแจ้งปัญหา งานจะถูกร่างขึ้นหลังจากพิจารณาสถานการณ์อย่างรอบคอบ
ยิ่งคิดงานอย่างรอบคอบมากเท่าไหร่ การออกแบบและติดตั้งที่ตามมาก็ยิ่งประสบความสำเร็จมากขึ้นเท่านั้น การมอบหมายควรสะท้อนถึงสถานการณ์ที่มีอยู่ สถานการณ์ และเตรียมร่างรายละเอียด เช่น การติดตั้ง อาคาร งานกำหนดภารกิจเฉพาะที่สะท้อนถึงความต้องการที่แท้จริง: เพิ่มผลผลิตและความปลอดภัยของแรงงาน, ประหยัดไฟฟ้า, น้ำ, เชื้อเพลิง ฯลฯ, ปรับปรุงคุณภาพระดับ, ความดัน, ควบคุมอุณหภูมิ, ติดตั้งอุปกรณ์ควบคุมและส่งสัญญาณในบางห้อง, โดยใช้ อุปกรณ์บางประเภท ฯลฯ
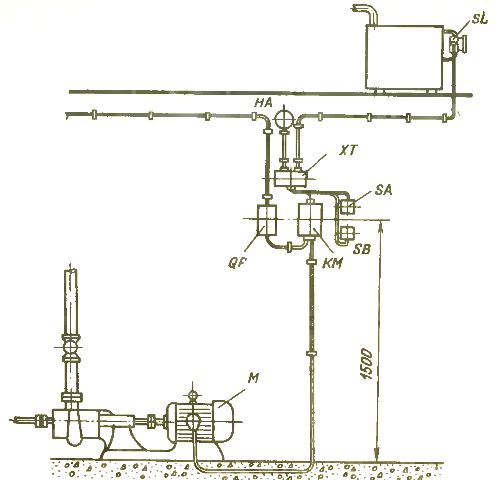
ตัวอย่างเช่น ในรูปที่ 1 แสดงแผนผังการจัดหาน้ำของโหนดเทคโนโลยีในการประชุมเชิงปฏิบัติการ มีถังเก็บน้ำแรงดันคงที่ 1 ตั้งอยู่บนหลังคาของอาคารและติดตั้งท่อน้ำล้น 2. น้ำเข้าสู่ถังผ่านท่อจ่าย 3 จากปั๊ม 4. ระดับน้ำในถังถูกตรวจสอบโดยเจ้าหน้าที่โรงกลั่น . เมื่อระดับน้ำใกล้ถึงขีดบน น้ำส่วนเกินจะไหลผ่านท่อที่ 2 ลงสู่ท่อน้ำทิ้ง
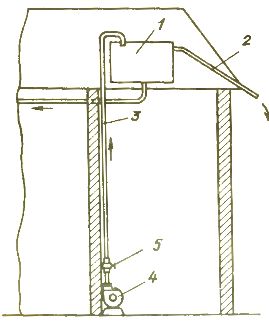
ข้าว. 1.ระบบประปาพร้อมน้ำในกระบวนการผลิต
ระบบนี้มีข้อเสียหลายประการ ที่นี่มีการใช้น้ำมากเกินไปอย่างมีนัยสำคัญเนื่องจากเจ้าหน้าที่ที่ทำงานไม่ได้สังเกตเห็นการล้นของถังและการปิดเครื่องสูบน้ำนั้นไม่ได้ผลกำไรเสมอไปเนื่องจากการใช้น้ำจากถังอย่างต่อเนื่องสำหรับความต้องการทางเทคโนโลยี หยดน้ำและน้ำหายไป
หากปั๊มไม่ได้ปิดเพื่อให้ทำงานอย่างต่อเนื่องและการจ่ายน้ำถูกควบคุมโดยวาล์ว 5 บนท่อส่ง 4 แม้จะใช้วิธีนี้ ก็ไม่มีการรับประกันว่าจะไม่มีการรั่วไหลของน้ำเนื่องจากการไหลของน้ำที่ไม่สอดคล้องกันจาก ถัง นอกจากนี้ยังมีการใช้ไฟฟ้ามากเกินไปและการสึกหรอของปั๊มที่ทำงานตลอดเวลา 6
จำเป็นต้องกำหนดงานทั่วไปของงานที่วางแผนไว้:
-
เพื่อลดปริมาณการใช้และการใช้น้ำมากเกินไป
-
ลดกำลังไฟเกิน
-
ลดการสึกหรอของปั๊มและมอเตอร์ไฟฟ้า
-
การปรับปรุงสภาพการทำงาน
-
เพื่อไม่ให้เบี่ยงเบนความสนใจของพนักงาน คนงานจากการทำงานหลัก
-
ปรับปรุงคุณภาพน้ำประปา
อย่างที่คุณเห็น สำหรับระบบน้ำประปาที่เรียบง่ายนี้ คุณสามารถกำหนดเป้าหมายที่มีประสิทธิภาพได้จำนวนหนึ่ง ซึ่งความสำเร็จดังกล่าวจะช่วยปรับปรุงการทำงานและเศรษฐกิจของระบบอย่างมีนัยสำคัญ
การรวบรวมข้อมูลเบื้องต้นแสดงให้เห็นว่าปั๊มที่ติดตั้งนั้นติดตั้งมอเตอร์ไฟฟ้า 4A80A2 พร้อมข้อมูลเล็กน้อย: ความเร็วในการหมุน 2850 รอบต่อนาที, แรงดันไฟฟ้าสลับ 380 V, 50 Hz, 3.3 A, ประสิทธิภาพ -0.81, cosφ = 0.85, Azn = 6 ,5; ถังขนาดความจุ 1.5 ลบ.ม. (ถังไม่มีสายดิน) ป้อน 1 ท่อเส้นผ่านศูนย์กลาง 42 มม.
หลังจากกำหนดปัญหาและรวบรวมข้อมูลเบื้องต้นแล้วจำเป็นต้องวิเคราะห์ร่างทิศทางที่ต้องการสำหรับการแก้ปัญหาและตัดสินใจ
ปัญหาสามารถแก้ไขได้โดยการติดตั้งตัวควบคุมระดับท่อฟีดในถัง แต่โซลูชันดังกล่าวไม่สามารถพิจารณาได้ว่าน่าพอใจเนื่องจากการแก้ปัญหาการควบคุมระดับเราไม่เป็นไปตามข้อกำหนดในการประหยัดพลังงานและลดการสึกหรอของปั๊ม
สามารถติดตั้งวาล์วควบคุมบนท่อด้วยแอคชูเอเตอร์ไฟฟ้าที่ควบคุมโดยเซ็นเซอร์ระดับในถัง มีข้อเสียของวิธีการก่อนหน้านี้เช่นเดียวกับการใช้อุปกรณ์ไฟฟ้าที่เพิ่มขึ้น
จากการอภิปรายเกี่ยวกับตัวเลือกเหล่านี้ ชัดเจนดังต่อไปนี้: ระดับในถังต้องควบคุมโดยการเปิดปั๊มเมื่อระดับน้ำลดลง และค่อนข้างชัดเจน การเปิดต้องเป็นไปโดยอัตโนมัติ
จากนั้นจำเป็นต้องกำหนดงานเช่น กำหนดขอบเขตของโครงการ เมื่อออกแบบ คุณควร:
1) พัฒนาแผนผังของแหล่งจ่ายไฟและการป้องกันมอเตอร์ไฟฟ้า
2) การพัฒนาแผนผังของการควบคุมอัตโนมัติ
3) การพัฒนาแผนภาพสัญญาณเตือน
4) เลือกอุปกรณ์ไฟฟ้าและควบคุมและส่งสัญญาณ
5) จัดทำแผนและประเภทการจัดวางอุปกรณ์และเครื่องใช้ไฟฟ้า
6) วาดไดอะแกรมไฟฟ้าหรือที่เรียกว่าไดอะแกรมไฟฟ้าและการเชื่อมต่อ
7) เลือกผลิตภัณฑ์เคเบิลและเคเบิลและผลิตภัณฑ์ติดตั้ง
8) หากไม่สามารถใช้วิธีมาตรฐานในการติดตั้งอุปกรณ์และวางสายไฟฟ้าได้ให้เตรียมภาพร่างที่เกี่ยวข้อง
9) วางอุปกรณ์ไฟฟ้าและอุปกรณ์ควบคุมและส่งสัญญาณบนแผนผังชั้นโดยใช้สัญลักษณ์
10) จัดทำแผนการผลิตงานการว่าจ้างติดตั้งไฟฟ้า
11) ทำการประเมินเช่น กำหนดต้นทุนของอุปกรณ์และหากจำเป็นต้นทุนของงานติดตั้ง
การออกแบบนั้นประกอบด้วยการพัฒนาองค์ประกอบของวิธีการทางเทคนิคซึ่งงานที่สอดคล้องกับข้อกำหนดทั้งหมดของงานที่มอบหมาย การเชื่อมต่อ (แบบแผน) ของอุปกรณ์เหล่านี้จะต้องจัดเตรียมอัลกอริทึมที่ระบุสำหรับการทำงานของการติดตั้งระบบไฟฟ้าอย่างมีประสิทธิภาพและปลอดภัยสูงสุดสำหรับบุคลากร ดังนั้น ในกรณีนี้ แผนภาพการจ่ายไฟไม่น่าพอใจ จำเป็นต้องออกแบบใหม่
เรามาแสดงขั้นตอนการออกแบบในลำดับข้างต้น วรรคที่มีหมายเลข
1. ขับมอเตอร์ไฟฟ้า ได้แก่ E. สำหรับการแปลงกระแสไฟฟ้า จำเป็นต้องใช้สตาร์ทเตอร์ ซึ่งเราใช้สตาร์ทเตอร์แบบแม่เหล็ก PME-122 ประเภทของสตาร์ทเตอร์ขึ้นอยู่กับกระแสที่กำหนดของมอเตอร์ ด้วยกระแส 3.3 A ของเรา กระแสพิกัดที่ใกล้เคียงที่สุดของสตาร์ทเตอร์คือ 10 A ซึ่งสะท้อนจากตัวเลขตัวแรกในประเภท
นอกจากนี้เนื่องจากสตาร์ทเตอร์ติดตั้งในอาคารจึงต้องมีเคสป้องกัน - นี่คือหมายเลข 2 ในประเภทของสตาร์ทเตอร์ (ในแบบคู่ขนานเราจะแจ้งให้คุณทราบว่า 1 เป็นสตาร์ทเตอร์ที่ไม่มีเคส 3 ป้องกันฝุ่น ระดับการป้องกันคือ IP54)
นอกจากนี้มอเตอร์ไฟฟ้าจะต้องมีการป้องกันการโอเวอร์โหลดและทำได้โดยใช้รีเลย์ความร้อนไฟฟ้า สตาร์ทเตอร์มีรีเลย์ประเภทนี้คือ TRN-10การปรากฏตัวของการป้องกันความร้อนในประเภทสตาร์ทเตอร์จะสะท้อนด้วยตัวเลขหลักที่สาม ในกรณีนี้ — 2 (1 — สตาร์ทเตอร์แบบย้อนกลับไม่ได้โดยไม่มีการป้องกัน 2 — ย้อนกลับไม่ได้โดยมีการป้องกัน 3 — ย้อนกลับได้โดยไม่มีการป้องกัน 4 — ย้อนกลับได้โดยมีการป้องกัน)
เราเลือกกระแสมาตรฐานของรีเลย์ความร้อน — 4 A เช่น ที่ใกล้ที่สุดมากกว่ากระแสมอเตอร์ เนื่องจากรีเลย์มีความสามารถในการควบคุมกระแสการทำงานภายในขอบเขตเล็กน้อย เราจึงจัดทำโครงการเพื่อระบุค่าของการควบคุมดังกล่าวตามกระแสโหลดระหว่างการทำงานปกติของมอเตอร์ไฟฟ้า
นอกจากประเภทนี้แล้วยังมีอาหารเรียกน้ำย่อยอื่นๆ อีก เช่น ซีรีย์ PML พร้อมเทอร์มอลรีเลย์ไฟฟ้าในตัว RTL ในกรณีของเรา อาจใช้สตาร์ทเตอร์ PML-121002V ได้ แต่ไม่ตรงตามข้อกำหนดบางประการในส่วนของวงจรควบคุม ซึ่งจะกล่าวถึงในย่อหน้าที่ 3 ของโครงการ
นอกจากนี้ สายจ่ายของปั๊มยังต้องการการป้องกันกระแสลัดวงจร เช่นเดียวกับอุปกรณ์ที่ทำให้สามารถถอดสตาร์ทเตอร์และมอเตอร์ไฟฟ้าออกจากเครือข่ายจ่ายไฟได้หากจำเป็น ข้อกำหนดเหล่านี้สามารถปฏิบัติตามได้ด้วยเบรกเกอร์เช่น พิมพ์ AP50B-ZMโดยต่ออนุกรมกับสตาร์ทเตอร์ที่ด้านจ่ายไฟ
ตามกฎแล้วรูปแบบที่พัฒนาขึ้นนั้นวาดบนกระดาษ (รูปที่ 2)
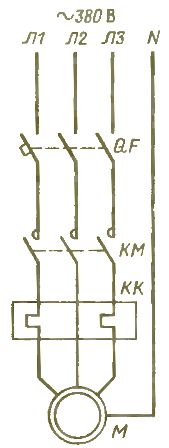
ข้าว. 2. แผนภาพการจ่ายไฟของปั๊ม
เนื่องจากมีการป้องกันโอเวอร์โหลดโดยสตาร์ทเตอร์ เบรกเกอร์จะช่วยป้องกันกระแสลัดวงจรโดยคำนึงถึงกระแสการทำงานของมอเตอร์และกระแสของรีเลย์ระบายความร้อนของสตาร์ทเตอร์ พิกัดกระแสของเบรกเกอร์ควรมีอย่างน้อย 4-6 A และเพื่อชดเชยกระแสของรีเลย์ความร้อน กระแสสะดุดของ การเปิดตัวควรสูงกว่าหนึ่งหรือสองขั้น
เนื่องจากกระแสไฟของเบรกเกอร์วงจร AP50B -ZM คือ 50 A จึงเป็นไปตามข้อกำหนดที่จำเป็น และกระแสการทำงานของการปล่อยกระแสไฟจะใช้มาตราส่วนค่ามาตรฐานที่ -10 A
2. ไดอะแกรมแผนผังสำหรับการควบคุมปั๊มอัตโนมัติได้รับการพัฒนาตามแบบแผนทั่วไปและยอมรับโดยทั่วไป
ตัวอย่างเช่น ในรูปที่ 3 และแสดงไดอะแกรมของการควบคุมด้วยตนเองที่ดำเนินการโดยใช้ปุ่ม «เริ่ม» (หน้าสัมผัสเปิด) และ «หยุด» (หน้าสัมผัสเปิด)
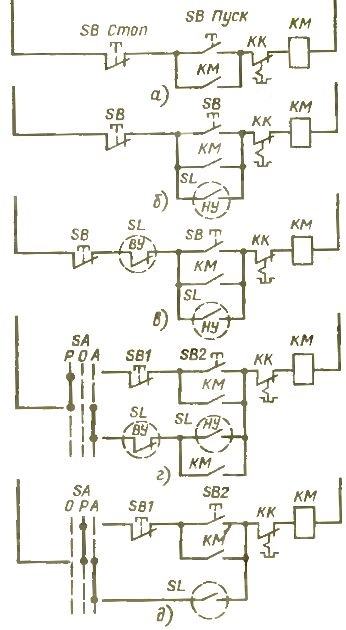
ข้าว. 3. การออกแบบรูปแบบการควบคุม
เมื่อกดปุ่ม «Start» แรงดันไฟฟ้าผ่านหน้าสัมผัสปิดของปุ่ม «Stop» จะถูกส่งไปยังขดลวดของสตาร์ทเตอร์ KM ซึ่งเปิดใช้งานและปิดหน้าสัมผัส หน้าสัมผัสตัวใดตัวหนึ่งเชื่อมต่อแบบขนานกับปุ่ม «เริ่ม» ดังนั้นหลังจากปล่อยปุ่มนี้ หน้าสัมผัสนี้จะถูกจ่ายไฟไปยังคอยล์ ซึ่งเรียกว่าหน้าสัมผัสเสริม
ในการปิดสตาร์ทเตอร์ให้กดปุ่ม «หยุด» หน้าสัมผัสซึ่งจะเปิดขึ้นและขัดจังหวะวงจรจ่ายของคอยล์ซึ่งจะปล่อยหน้าสัมผัส
เพื่อวัตถุประสงค์ของระบบอัตโนมัติ คุณสามารถเชื่อมต่อหน้าสัมผัสระดับล่างของเซ็นเซอร์ระดับ NU SL ขนานกับปุ่ม SB2 (รูปที่ 3, b)
เมื่อน้ำถึงระดับ LP เซ็นเซอร์จะเปิดสตาร์ทเตอร์และปั๊ม อย่างไรก็ตาม ในรูปแบบนี้ไม่มีการปิดปั๊มอัตโนมัติเมื่อระดับน้ำสูงกว่าเครื่องหมาย OU ดังนั้นจึงจำเป็นต้องใส่หน้าสัมผัสที่สองของเซ็นเซอร์ SL ลงในวงจรควบคุมเป็นที่ชัดเจนว่าผู้ติดต่อนี้จะต้องเปิดอยู่และเนื่องจากการกระทำนั้นคล้ายกับปุ่ม «หยุด» เราจึงเชื่อมต่อกับปุ่มดังกล่าวตามลำดับ (รูปที่ 3, ค)
ในรูปแบบนี้ การควบคุมแบบแมนนวลและแบบอัตโนมัติจะรวมกันในวงจรไฟฟ้าทั่วไป อย่างไรก็ตามสิ่งนี้ไม่สะดวกและการทำซ้ำดังกล่าวไม่สมเหตุสมผลดังนั้นตามกฎแล้วโซ่ดังกล่าวจะถูกแยกออก การแยกทำได้โดยใช้สวิตช์ แผนภาพที่เกี่ยวข้องแสดงในรูปที่ 3, ง.
สวิตช์ SA ที่แนะนำมีตำแหน่งสวิตช์สามตำแหน่ง ได้แก่ การควบคุมด้วยตนเอง (P) ปิด (O) และการควบคุมอัตโนมัติ (L) ตำแหน่ง O จำเป็นต้องปิดวงจรระหว่างการซ่อมแซม การเสีย และกรณีอื่นๆ ซึ่งหนึ่งในนั้นอธิบายไว้ด้านล่าง
รูปแบบข้างต้นใช้เมื่อมีช่วงที่เหมาะสมระหว่างพารามิเตอร์ที่ควบคุม ในกรณีนี้คือ ระดับ เช่น 0.5-1 ม. รูปแบบนี้หลีกเลี่ยงการสตาร์ทปั๊มบ่อยเกินไป นอกจากนี้ยังสามารถใช้เพื่อวัตถุประสงค์อื่น เช่น เพื่อควบคุมอุณหภูมิห้อง
แต่ในกรณีของเรา ระดับในถังต้องคงไว้ในระดับหนึ่ง และโครงร่างที่ระบุสามารถทำให้ง่ายขึ้นได้ เนื่องจากในกรณีนี้จะมีความซับซ้อนทางเทคนิคโดยไม่จำเป็นเนื่องจากเซ็นเซอร์จำนวนมากขึ้น ข้อเสียนี้สามารถหลีกเลี่ยงได้หากโครงร่างที่ออกแบบเชื่อมโยงกับลักษณะของอุปกรณ์ที่ใช้
ตัวอย่างเช่น สามารถเพิ่มอัตราขยายได้โดยใช้สวิตช์ระดับลูกลอยชนิด RP-40 รีเลย์มีสวิตช์ปรอทในการออกแบบซึ่งสวิตช์มีการหน่วงเวลาเนื่องจากเวลาที่ปรอทไหลเข้าสู่อุปกรณ์สัมผัส สิ่งนี้ทำให้สามารถบรรลุความล้มเหลวของรีเลย์ในช่วงขนาดเล็กซึ่งจำเป็นในกรณีนี้คือ 20-25 มม. ซึ่งเป็นไปตามความแม่นยำของการรักษาระดับตามข้อกำหนดทางเทคโนโลยีของการผลิต
หากคุณใช้เซ็นเซอร์ระดับอื่นๆ เช่น DPE หรือ ERSU เซ็นเซอร์จะทำงานทันที และเพื่อป้องกันการสตาร์ทปั๊มบ่อยครั้ง จำเป็นต้องใส่รีเลย์เวลาในวงจรควบคุมเพื่อชะลอการตอบสนอง และนี่คือ ภาวะแทรกซ้อนของวงจร ดังนั้นการเลือกอุปกรณ์อย่างชำนาญทำให้สามารถแก้ปัญหาต่าง ๆ ที่อยู่ในขั้นตอนการออกแบบได้
ไดอะแกรมที่มีรีเลย์โฟลต RP-40 แสดงในรูปที่ 3, e. ที่นี่จำเป็นต้องอธิบายการเปลี่ยนแปลงตำแหน่งการสลับของสวิตช์ SA ความจริงก็คือสวิตช์ชนิด PKP10-48-2 ที่เหมาะสมที่ยอมรับสำหรับการติดตั้งมีการปิดหน้าสัมผัสดังแสดงในรูปที่ 3, e และไม่เหมือนกับที่คิดไว้แต่เดิมในการพัฒนาวงจรของมะเดื่อ 3, d. แต่ทั้งสองแบบสำหรับการปิดหน้าสัมผัสสวิตช์นั้นใช้งานได้เทียบเท่ากัน
ถัดไปคุณต้องจัดเตรียมวงจรสัญญาณเตือนภัย ในกรณีนี้ สถานการณ์ฉุกเฉินคือปั๊มทำงานล้มเหลวเมื่อระดับน้ำในถังต่ำกว่าระดับที่อนุญาต เรารับสัญญาณเสียงผ่านการโทร เช่น จากประเภท ZP-220
เนื่องจากจะต้องมีปฏิกิริยาต่อการลดระดับลง กล่าวคือ เพื่อปิดหน้าสัมผัสของเซ็นเซอร์ SL เช่นเดียวกับหน้าสัมผัสของ KM starter วงจรที่นี่จะเป็นแบบที่ง่ายที่สุดและจะประกอบด้วยหน้าสัมผัสที่เชื่อมต่อแบบอนุกรมของเซ็นเซอร์และหน้าสัมผัสเปิดของ KM starter ตอนนี้โครงร่างที่พัฒนาขึ้นทั้งหมดสามารถสรุปได้ในภาพวาดเดียว (รูปที่ 4) ซึ่งเป็นแผนผังวงจรของอุปกรณ์ไฟฟ้าและการควบคุมอัตโนมัติของปั๊มของระบบน้ำประปา
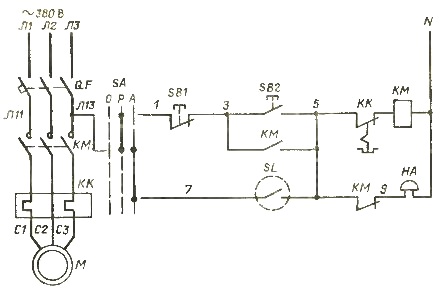
ข้าว. 4.แผนผังการจ่ายไฟและการควบคุมปั๊ม
วงจรทั้งหมดในแผนภาพระหว่างหน้าสัมผัสและอุปกรณ์ถูกทำเครื่องหมายด้วยหมายเลข 1,3, 5 เป็นต้น แผนภาพแสดงให้เห็นว่าใช้หน้าสัมผัสเสริมของ KM starter - หนึ่งเครื่องหมายและหนึ่งตัวแบ่ง แต่เนื่องจาก PML ซีรีส์สตาร์ทเตอร์ถึง 10 A มีหน้าสัมผัสดังกล่าวเพียงตัวเดียว — ปิดหรือเปิด และเป็นไปไม่ได้ที่จะแนะนำรีเลย์ระดับกลางในวงจรควบคุมเนื่องจากความซับซ้อน ในกรณีนี้ สตาร์ทเตอร์ที่มีหน้าสัมผัสเสริมจำนวนมากควร นำมาใช้ในการติดตั้งและเพื่อจุดประสงค์นี้ สตาร์ทเตอร์ซีรีส์ PME ซึ่งเลือกไว้ก่อนหน้านี้จึงเหมาะสม สามารถใช้ตัวเริ่มต้นอื่น ๆ ของการออกแบบที่จำเป็นได้ ปุ่ม SB สามารถใช้เป็น PKE 722-2UZ ได้
3. ขั้นตอนที่สามของการออกแบบไม่ได้แยกออกเป็นส่วน ๆ เนื่องจากความเรียบง่ายและความสามัคคีของวงจรกับวงจรควบคุม
4. การเลือกอุปกรณ์ไฟฟ้าในวงจรที่พัฒนาแล้ว ดังที่แสดงไว้ สามารถทำได้แล้วในขั้นตอนของการพัฒนาวงจร ซึ่งช่วยให้สามารถใช้ฟังก์ชันการทำงานได้อย่างสมบูรณ์ที่สุดและการพัฒนาวงจรที่เรียบง่ายและประหยัดซึ่งใช้ประโยชน์สูงสุดจากทั้งหมด ความเป็นไปได้ของอุปกรณ์
ตัวเลือกอื่นก็เป็นไปได้เช่นกัน: การเลือกอุปกรณ์ตามแบบแผนสำเร็จรูป แต่บางครั้งวิธีการนี้นำไปสู่ความยุ่งยากทางเทคนิค เช่น การเพิ่มจำนวนรีเลย์ระดับกลางเนื่องจากการใช้หน้าสัมผัสมากเกินไปในวงจรในการออกแบบเชิงทฤษฎีอย่างหมดจด ตามนั้นก่อนที่จะดำเนินการออกแบบจำเป็นต้องศึกษาลักษณะการออกแบบและความสามารถของอุปกรณ์ไฟฟ้าอย่างรอบคอบนี่เป็นสิ่งจำเป็นในการออกแบบวงจรที่ซับซ้อนมากขึ้น เมื่อไม่สามารถร่างโครงร่างอุปกรณ์ไฟฟ้าบางประเภทในแบบขนานและโดยสัญชาตญาณในกระบวนการออกแบบได้
5. นอกจากนี้ขึ้นอยู่กับตำแหน่งเฉพาะและที่ตั้งของอุปกรณ์เทคโนโลยีถนนทางเข้าและตำแหน่งของตำแหน่งที่เสนอของอุปกรณ์ไฟฟ้าแผนและประเภทของการจัดเรียงอุปกรณ์ไฟฟ้าและอุปกรณ์
ในกรณีนี้ แผนจะง่ายมากและไม่มีข้อมูลสูงสุด ดังนั้นจึงเป็นการสมควรกว่าที่จะวาดมุมมองด้านหน้าของผนังห้องใกล้กับปั๊มซึ่งทุกอย่างได้รับการออกแบบอยู่ มีการอธิบายผลิตภัณฑ์การติดตั้งเสริมเช่นกล่องจ่ายไฟรวมถึงเส้นทางเดินสายไฟฟ้า (รูปที่ 5 ) . รีเลย์ลูกลอย RP-40 ติดตั้งอยู่บนถัง (รูปที่ 5)
ข้าว. 5. แผนภาพการติดตั้ง
6. ไดอะแกรมของการเชื่อมต่อและการเชื่อมต่อนำเสนอข้อมูลที่เป็นประโยชน์อย่างแท้จริงเกี่ยวกับวิธีการและสายไฟเพื่อเชื่อมต่อที่หนีบของอุปกรณ์ไฟฟ้า พวกมันถูกรวบรวมบนพื้นฐานของไดอะแกรมแผนผังและในกระบวนการของการเดินสายภาคสนามจริงจะถูกใช้เป็นเอกสารพื้นฐาน และไดอะแกรมแผนผังทำหน้าที่เป็นข้อมูลอ้างอิง ณ จุดนี้และถูกใช้เมื่อเกิดความคลุมเครือ แผนผังทั้งหมดนำมารวมกันแล้วทำหน้าที่เป็นเอกสารประกอบการปฏิบัติงาน
แผนภาพสำหรับตัวอย่างของเราแสดงในรูปที่ 6. แผนภาพการเดินสายไฟของอุปกรณ์ไฟฟ้าที่ออกแบบทั้งหมดและแคลมป์สำหรับเชื่อมต่อสายไฟภายนอกแสดงไว้ที่นี่ ตามแผนผังวงจรในรูป 4 เชื่อมต่อที่หนีบของอุปกรณ์เหล่านี้ในกระบวนการเชื่อมต่อจะมีการเปิดเผยเส้นทางที่สั้นที่สุดสำหรับการวางสายไฟฟ้าความจำเป็นในการยืดและกล่องกระจาย
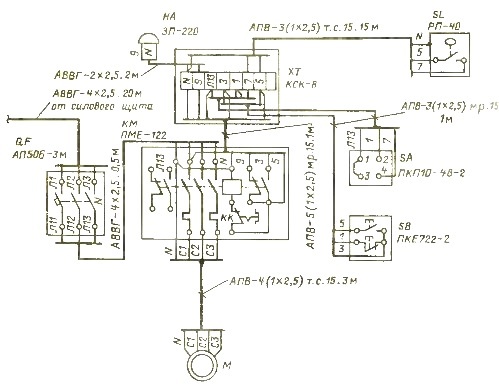
ข้าว. 6. แผนภาพการเดินสายไฟของอุปกรณ์ไฟฟ้า
ในรูป 6 ความต้องการกล่องรวมสัญญาณเกิดขึ้นจากความต้องการการเชื่อมต่อระหว่างฮาร์ดแวร์เนื่องจากต้องทำการเชื่อมต่อสายเคเบิลภายใต้ตัวยึดสลักเกลียว นี่เป็นเพราะความจริงที่ว่าจะใช้สายอลูมิเนียมซึ่งการบัดกรีนั้นยากและเป็นไปไม่ได้สำหรับหน้าตัดขนาดเล็กและนอกจากนี้การเชื่อมต่อแบบสลักจะทำได้อย่างรวดเร็วและอนุญาตให้มีการเชื่อมต่อใหม่ในอนาคตสำหรับการตรวจสอบและบำรุงรักษา
เนื่องจากต้องใช้แคลมป์เจ็ดตัวสำหรับการเชื่อมต่อ จึงใช้กล่องแยกประเภท KSK-8 ที่มีแคลมป์สองด้านกันฝุ่นแปดตัว (ระดับการป้องกัน IP44) ในการติดตั้ง ในตอนท้ายของการออกแบบการเชื่อมต่อระหว่างอุปกรณ์จะมีการระบุสายเคเบิลที่มีจำนวนคอร์ที่ต้องการ
ในกรณีนี้จำเป็นต้องคำนึงถึงข้อกำหนดอื่น ๆ เช่น อย่างที่บอกไปแล้วว่าแท้งค์น้ำไม่ได้ต่อสายดิน อย่างไรก็ตามตอนนี้เกี่ยวกับการติดตั้งอุปกรณ์ไฟฟ้า - รีเลย์ RP-40 ถังจะต้องต่อสายดินตามข้อกำหนดด้านความปลอดภัยทางไฟฟ้า
การต่อสายดินทำได้โดยใช้สายดินพิเศษที่ทำจากเหล็กกลมขนาดเส้นผ่านศูนย์กลาง 6 มม. ต่อเข้ากับวงจรสายดินของโรงปฏิบัติงาน
เป็นไปได้อีกวิธีหนึ่ง — เนื่องจากรีเลย์ RP-40 ไม่ใช้ไฟฟ้าและเป็นอุปกรณ์ควบคุม ในการต่อลงดิน คุณสามารถใช้วงจรกราวด์ของแหล่งพลังงาน (สถานีย่อยหม้อแปลง) และสายที่นี่จะเป็นสายกลางของ เครือข่ายไฟฟ้าและสายดินจะมีอยู่แล้ว หายไป — ยังเป็นมาตรการที่มีประสิทธิภาพในการป้องกันไฟฟ้าช็อต ในการทำเช่นนี้ ในการเดินสายระหว่างกล่อง XT และรีเลย์ SL เราได้เตรียมสายไฟเส้นที่สามไว้ โดยด้านหนึ่งต่อกับสายกลาง และอีกสายหนึ่งเชื่อมต่อกับตัวรีเลย์
7. ในตอนท้ายของการวาดไดอะแกรมจะมีการเลือกประเภทของการเดินสายเฉพาะ - ประเภทของสายไฟและสายเคเบิล, วิธีการวาง, ความยาววัดจากแบบแปลนพื้นหรือในรูปแบบและทั้งหมดนี้นำไปใช้กับการวาดภาพ ส่วนตัดขวางถูกเลือกตาม PUE สำหรับกระแสโหลดที่อนุญาตในระยะยาว ความจุของสายเคเบิลจะต้องสูงกว่ากระแสโหลด ในกรณีนี้มากกว่ากระแสมอเตอร์
จากสตาร์ทเตอร์ไปยังมอเตอร์ไฟฟ้า สายไฟจะต้องได้รับการปกป้องจากความเสียหายทางกล ซึ่งโดยปกติจะทำกับท่อเหล็กเชื่อมด้วยไฟฟ้าที่มีความหนาของผนังอย่างน้อย 2 มม.
ตามกฎแล้วท่อเหล็กวางอยู่บนผนังในสถานที่ที่มีภาระทางกลและความเสียหายและในสถานที่อื่น ๆ รวมทั้งในพื้นคอนกรีตเช่นในตัวอย่างของเราใช้ท่อพลาสติกที่มีเส้นผ่านศูนย์กลางที่เหมาะสม สำหรับระยะทางเล็ก ๆ อนุญาตให้ใช้ท่อเหล็กชิ้นเดียวได้
การเดินสายไฟฟ้าจากสตาร์ทเตอร์ไปยังกล่อง XT ทำได้ด้วยสายไฟในท่อโลหะที่วางตามแนวผนังพร้อมที่หนีบ การเดินสายไปยังปุ่มและสวิตช์ทำในลักษณะเดียวกันคุณสามารถวางสายเคเบิลเข้ากับการสนทนาได้
สำหรับการเดินสายไฟฟ้าไปยังเซ็นเซอร์ระดับถัง ที่นี่เรายอมรับสายไฟในท่อเหล็กอย่างแน่นอน เนื่องจากเป็นข้อกำหนดสำหรับการเดินสายไฟฟ้าบนเพดานเพื่อความปลอดภัยจากอัคคีภัย เนื่องจากถังตั้งอยู่บนเพดานของโรงปฏิบัติงาน
8. การเดินสายในเวิร์กช็อปนั้นวางตามเส้นทางที่เรียบง่ายและไม่มีลักษณะโครงสร้างใดๆ ดังนั้นจึงไม่จำเป็นต้องเขียนแบบพิเศษ
9. การรวบรวมประเภทของการจัดเรียงอุปกรณ์ไฟฟ้าได้ดำเนินการไปแล้วก่อนหน้านี้และแผนในกรณีนี้จะง่ายที่สุดดังนั้นจึงไม่จำเป็นต้องมีรูปวาดพิเศษ แผนผังอุปกรณ์ไฟฟ้าและการเดินสายไฟที่ระบุตำแหน่งและวิธีการติดตั้งมีไว้สำหรับอุปกรณ์จำนวนมากขึ้น ดังที่แสดงในตัวอย่างการออกแบบต่อไปนี้
10. แผนการผลิตงานและการว่าจ้างติดตั้งไฟฟ้าอย่างน้อยต้องกำหนดลำดับการทำงาน เช่น กำหนดเวลาการทำงานโดยไม่กระทบต่อโรงปฏิบัติงาน จำนวนช่างไฟฟ้า ขั้นตอนการวางผังควบคุม , การทดสอบการติดตั้งไฟฟ้าที่ติดตั้ง , การทดลองใช้งาน , การส่งมอบให้กับคนงานในโรงงาน ฯลฯ
11. ก่อนจัดทำประมาณการจำเป็นต้องเตรียมข้อกำหนดของอุปกรณ์ไฟฟ้าและวัสดุ โครงการเสร็จสมบูรณ์ขึ้นอยู่กับการอนุมัติ