ระบบควบคุมอัตโนมัติแบบปิด
 ระบบควบคุมอัตโนมัติแบบปิด (ACS) แตกต่างจากวงจรเปิดในอุปกรณ์ที่ใช้และความสมบูรณ์ของระบบอัตโนมัติ เมื่อเปิด ACS ยูนิตหลัก (รวมถึงอุปกรณ์ควบคุม) จะไม่ได้รับข้อมูลเกี่ยวกับโหมดการทำงานจริงของการติดตั้งระบบไฟฟ้า (มอเตอร์ขับเคลื่อน เครื่องจักรที่กำลังทำงาน)
ระบบควบคุมอัตโนมัติแบบปิด (ACS) แตกต่างจากวงจรเปิดในอุปกรณ์ที่ใช้และความสมบูรณ์ของระบบอัตโนมัติ เมื่อเปิด ACS ยูนิตหลัก (รวมถึงอุปกรณ์ควบคุม) จะไม่ได้รับข้อมูลเกี่ยวกับโหมดการทำงานจริงของการติดตั้งระบบไฟฟ้า (มอเตอร์ขับเคลื่อน เครื่องจักรที่กำลังทำงาน)
ใน ASUB แบบปิด ข้อมูลจะถูกส่งไปยังส่วนควบคุม ซึ่งจะมาพร้อมกับการส่งสัญญาณคำสั่งที่เหมาะสม วงจรที่ส่งข้อมูลดังกล่าวจะปิดวงจรควบคุม เกิดเป็น ACS แบบปิดหรือ ACS แบบป้อนกลับ
ความแตกต่างระหว่าง ACS แบบปิดและแบบเปิดสามารถอธิบายได้ด้วยตัวอย่างการควบคุมความเร็วของมอเตอร์ไฟฟ้าในระบบเจนเนอเรเตอร์-มอเตอร์ (G-D) เมื่อเปิด ACS (รูปที่ 1, a) ความเร็วที่ตั้งไว้ของมอเตอร์ไฟฟ้าจะถูกตั้งค่าด้วยตนเองโดยโพเทนชิออมิเตอร์ P การปรับความเร็วจะดำเนินการด้วยสายตาโดยมาตรวัดรอบซึ่งขับเคลื่อนโดยเครื่องกำเนิดความเร็วรอบ TG การเบี่ยงเบนความเร็วใด ๆ จากค่าที่ตั้งไว้จะถูกกำจัดโดยผู้ปฏิบัติงานโดยดำเนินการกับแถบเลื่อนโพเทนชิออมิเตอร์
ใน ACS แบบปิด (รูปที่1, b) กระดองของเครื่องกำเนิดความเร็วรอบ TG นั้นรวมอยู่ในวงจรกระตุ้นของเครื่องกำเนิด OVG ซึ่งสร้างระบบปิดหรือระบบป้อนกลับ (ในกรณีนี้คือป้อนกลับความเร็ว)
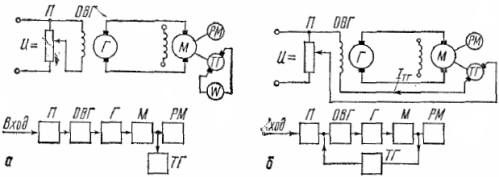
ข้าว. 1. วงจรควบคุมมอเตอร์ไฟฟ้าในระบบ G -M: a — เปิด ACS, b — ปิด ACS
กระแสที่สร้างโดยเครื่องสร้างความเร็วรอบ (Aztg) ในวงจรปิดที่ส่งตรงไปยังกระแสของโพเทนชิออมิเตอร์ (Azn) และกระแสที่เกิดขึ้นจะทำหน้าที่ในวงจรเท่ากับความแตกต่างทางเรขาคณิตของกระแสเหล่านี้ เมื่อใช้แถบเลื่อนของโพเทนชิออมิเตอร์ ผู้ดำเนินการจะตั้งค่าของกระแสผลลัพธ์ในขดลวดกระตุ้นของ OVG ซึ่งมีความเร็วที่สอดคล้องกันของมอเตอร์ไฟฟ้า นี่คือจุดสิ้นสุดของบทบาทของผู้ดำเนินการ ในอนาคตระบบจะรักษาโหมดการทำงานของไดรฟ์ไฟฟ้าที่ตั้งไว้โดยอัตโนมัติด้วยความแม่นยำ
สมมติว่าเป็นผลมาจากการขัดขวางความเร็วของมอเตอร์ไฟฟ้าลดลงเมื่อเทียบกับความเร็วที่ระบุ การลดความเร็วนั้นมาพร้อมกับการลดความเร็วของเครื่องกำเนิดความเร็วรอบและแรงดันไฟฟ้าที่ขั้วของมัน ในทางกลับกันสิ่งนี้จะนำไปสู่การลดลงของ Aztg ปัจจุบันในวงจรป้อนกลับและในตำแหน่งที่แน่นอนของแถบเลื่อนของโพเทนชิออมิเตอร์ - การเพิ่มขึ้นของกระแสที่เกิดขึ้นในขดลวดกระตุ้นของเครื่องกำเนิดไฟฟ้า แรงดันเจเนอเรเตอร์และความเร็วรอบของมอเตอร์จะเพิ่มขึ้นตาม
กระบวนการเพิ่มความเร็วและแรงดันไฟฟ้าจะดำเนินต่อไปจนกว่ากระแสในวงจรป้อนกลับจะถึงค่าที่ตั้งไว้และความเร็วของมอเตอร์จะถึงค่าที่ตั้งไว้
ในการวิเคราะห์ระบบควบคุมอัตโนมัติ แผนภูมิฟังก์ชัน…ในรูป2 รูปแบบการส่งสัญญาณการทำงานของ ACS ซึ่งรวมถึงองค์ประกอบต่อไปนี้:
1 — อุปกรณ์หลักที่กำหนดโหมดการทำงาน ให้คำสั่ง เริ่มต้นพัลส์หรือสัญญาณ
2 — องค์ประกอบของการเปรียบเทียบ ประกอบด้วยสัญญาณ X1 จากมาสเตอร์ สัญญาณ X0 ซึ่งจะกำหนดความเร็วหรือระดับของค่าที่ควบคุม โดยคำนึงถึงสัญญาณจากองค์ประกอบป้อนกลับหลักที่เก้า องค์ประกอบที่ 2 เปรียบเทียบสัญญาณที่ได้รับและส่งสัญญาณที่แก้ไขเพิ่มเติม X2
3 — องค์ประกอบการแปลง, สัญญาณ op แปลงเป็นรูปแบบอื่น, สะดวกกว่าสำหรับการส่งสัญญาณต่อไป. ตัวอย่างเช่น สัญญาณ X2 มีให้ในรูปของแรงดันไฮดรอลิก (นิวแมติก, เชิงกล) องค์ประกอบที่ 3 แปลงเป็นกระแสไฟฟ้า เนื่องจากการเปลี่ยนแปลงในลักษณะนี้อาจต้องใช้พลังงานเพิ่มเติม ดังนั้นองค์ประกอบที่ 3 จึงเชื่อมต่อกับแหล่งพลังงาน PE
4 — การเพิ่มองค์ประกอบจะได้รับสองสัญญาณ: X3 และ X8 จากองค์ประกอบการแก้ไข (องค์ประกอบหน่วยความจำ) 8 สัญญาณเหล่านี้รวมเข้าด้วยกันโดยองค์ประกอบ 4 และส่งไปยังองค์ประกอบถัดไป
5 — องค์ประกอบขยาย สัญญาณอินพุต X1 อาจอ่อนและต้องขยายสำหรับการส่งสัญญาณที่ตามมา สิ่งนี้ทำได้ผ่านองค์ประกอบ 5 ซึ่งเชื่อมต่อกับแหล่งพลังงาน PE
6 — องค์ประกอบผู้บริหาร, ดำเนินการสัญญาณที่ได้รับ (มอเตอร์ไฟฟ้า, รีเลย์แม่เหล็กไฟฟ้า, เซอร์โวมอเตอร์),
7 — วัตถุที่ปรับได้หรือเครื่องจักรทำงาน
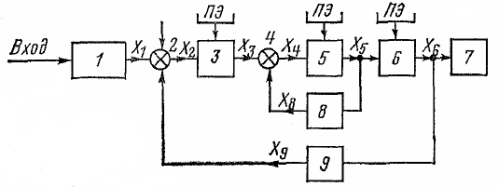
ข้าว. 2. แผนภาพการทำงานของ ACS
องค์ประกอบอัตโนมัติแต่ละรายการคือตัวแปลงพลังงาน ที่อินพุตซึ่งใช้ค่า X' และค่า X จะถูกลบออกจากเอาต์พุต «สำหรับแต่ละองค์ประกอบในสถานะหยุดนิ่งมีการพึ่งพา X บางอย่าง» (X') เรียกว่าลักษณะคงที่
ระบบควบคุมอัตโนมัติแบบปิดนั้นมีลักษณะของการตอบรับ มีวงจรป้อนกลับอย่างน้อยหนึ่งลูปที่เชื่อมต่อเอาต์พุตของระบบเข้ากับอินพุต นอกจากนี้ อาจมีสิ่งที่เรียกว่าข้อเสนอแนะภายใน ซึ่งเชื่อมต่อเอาต์พุตและอินพุตขององค์ประกอบ ACS แต่ละตัว
ข้อเสนอแนะแบ่งออกเป็นแบบแข็งและแบบยืดหยุ่น ข้อ จำกัด อย่างหนักทำงานทั้งในโหมดชั่วคราวและโหมดคงที่ของระบบซึ่งยืดหยุ่น - เฉพาะในโหมดชั่วคราวเท่านั้น แยกความแตกต่างระหว่างความคิดเห็นเชิงบวกและเชิงลบ เมื่อค่าที่ควบคุมเพิ่มขึ้นการเชื่อมต่อเชิงบวกก็จะเพิ่มมากขึ้นและค่าลบจะลดลง การตอบกลับสามารถส่งสัญญาณตามสัดส่วนของมุมการหมุน ความเร็ว แรงดัน กระแส ฯลฯ และเรียกว่ามุม ความเร็ว แรงดัน กระแสไฟฟ้าป้อนกลับตามนั้น สำหรับรายละเอียดเพิ่มเติมดูที่นี่: องค์ประกอบของระบบอัตโนมัติ
ตามหลักการของการทำงาน ACS สามารถแบ่งออกเป็นสามกลุ่ม:
-
การทำงานอย่างต่อเนื่องโดยที่ความสัมพันธ์ระหว่างค่าที่ควบคุมและค่าที่ตั้งไว้ไม่ขาดตอน
-
แรงกระตุ้นซึ่งการเชื่อมต่อระหว่างค่าควบคุมและค่าที่ตั้งไว้เกิดขึ้นในช่วงเวลาปกติ
-
การดำเนินการรีเลย์ที่การสื่อสารจะเกิดขึ้นเมื่อค่าถึงค่าที่กำหนดเท่านั้น
ACS สามารถแบ่งออกเป็นสามกลุ่ม:
-
ระบบเซ็ตพอยต์คงที่หรือต่ำซึ่งค่าที่ควบคุมโดยอัตโนมัติจะคงที่ เหล่านี้คือระบบรักษาเสถียรภาพซึ่งโดยพื้นฐานแล้วเป็นระบบควบคุมอัตโนมัติ (ACS)
-
ระบบที่ค่าเป้าหมายเปลี่ยนไปตามโปรแกรมเฉพาะที่กำหนดไว้ล่วงหน้า เป็นระบบการจัดการซอฟต์แวร์
-
ระบบที่ค่าที่กำหนดอาจแตกต่างกันอย่างมากและเป็นไปตามกฎหมายตามอำเภอใจ เช่น ระบบติดตาม.