ตัวอย่างโครงร่างไดรฟ์ไฟฟ้าสำหรับกลไกประเภทแรงเหวี่ยงและลูกสูบ
 ในรูป 1 a แสดงแผนภาพเทคโนโลยีของเครื่องสูบน้ำของการติดตั้งระบบระบายน้ำของเหมืองที่ออกแบบมาเพื่อสูบน้ำใต้ดินจากส้นเพลาของเหมืองและใบหน้าที่ฝังอยู่ การติดตั้งประกอบด้วยปั๊ม 1H และ 2H 2 ตัวพร้อมถังบรรจุ 1B และ 2B ซึ่งช่วยให้มั่นใจได้ถึงการชาร์จปั๊มอย่างต่อเนื่อง
ในรูป 1 a แสดงแผนภาพเทคโนโลยีของเครื่องสูบน้ำของการติดตั้งระบบระบายน้ำของเหมืองที่ออกแบบมาเพื่อสูบน้ำใต้ดินจากส้นเพลาของเหมืองและใบหน้าที่ฝังอยู่ การติดตั้งประกอบด้วยปั๊ม 1H และ 2H 2 ตัวพร้อมถังบรรจุ 1B และ 2B ซึ่งช่วยให้มั่นใจได้ถึงการชาร์จปั๊มอย่างต่อเนื่อง
ปั๊มถูกขับเคลื่อนด้วยการหมุนโดยมอเตอร์แบบอะซิงโครนัสที่มีกระรอก 1D และ 2D ซึ่งเชื่อมต่อกับส่วนบัสต่างๆ ของสถานีย่อยด้านล่างเพื่อความน่าเชื่อถือที่มากขึ้น (รูปที่ 1, b) หากระดับน้ำในหลุมต่ำกว่าระดับการทำงาน ปั๊มจะไม่สูบน้ำ เมื่อน้ำเกินระดับการทำงาน ปั๊มตัวใดตัวหนึ่งจะทำงาน เมื่อระดับน้ำสูงกว่าระดับฉุกเฉิน ปั๊มสำรองตัวที่สองจะเชื่อมต่อกับการทำงาน
โครงการ การเคลื่อนไหวขับเคลื่อนด้วยไฟฟ้า ช่วยให้สามารถควบคุมมอเตอร์ของปั๊มได้หลายแบบ:
• โดยอัตโนมัติขึ้นอยู่กับระดับน้ำในหลุม
• จากระยะไกล (จากห้องควบคุม)
• หมู่บ้านท้องถิ่น ปุ่มควบคุมตั้งอยู่ตรงปั๊ม
การเลือก AU อัตโนมัติและรีโมตคอนโทรลจะผ่านสวิตช์สากล 1UP และ 2UP สวิตช์ 1PP และ 2PP ให้คุณเลือกวิธีการควบคุมสำหรับมอเตอร์แต่ละตัว: รีโมทคอนโทรลและปุ่มท้องถิ่นโดยใช้ปุ่ม 1KU และ 2KU สวิตช์ซอฟต์แวร์ช่วยให้อุปกรณ์สึกหรอสม่ำเสมอเพื่อใช้มอเตอร์ 1D และ 2D สลับกันเป็นมอเตอร์ที่กำลังทำงาน
สตาร์ทเครื่องยนต์อัตโนมัติ ปั๊มทำงานนั้นใช้สวิตช์ลูกลอย 1PR ซึ่งควบคุมระดับน้ำทำงาน มอเตอร์ปั๊มสำรองเปิดโดยรีเลย์ลูกลอย 2PR ซึ่งควบคุมระดับฉุกเฉิน
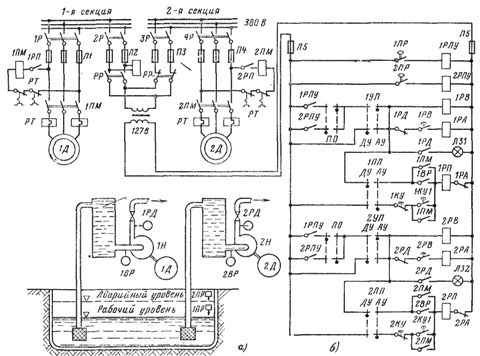
ข้าว. 1. การติดตั้งระบบระบายน้ำ (ก) และวงจรไฟฟ้า (ข)
หากหลังจากเวลาหน่วงของรีเลย์ 1PB หรือ 2PB ปั๊มไม่สร้างแรงดันที่ต้องการ มอเตอร์จะตัดการเชื่อมต่อจากเครือข่าย เครื่องยนต์จะไม่สตาร์ทแม้ว่าปั๊มจะเติมน้ำไม่เต็มที่ (ระดับน้ำในถังเติมไม่เพียงพอและหน้าสัมผัสของรีเลย์ควบคุมการเติม 1BP หรือ 2BP เปิดอยู่)
ในรูป 2 แสดงไดอะแกรมของไดรฟ์ไฟฟ้าอัตโนมัติของคอมเพรสเซอร์แบบลูกสูบ สามารถสตาร์ทมอเตอร์คอมเพรสเซอร์แบบอะซิงโครนัสได้จากไซต์การติดตั้งคอมเพรสเซอร์โดยใช้ปุ่ม 2KP และจากห้องควบคุมโดยใช้ปุ่ม 1KP อนุญาตให้เริ่มการทำงานผ่านรีเลย์ 2RP หากความดันในตัวรับอากาศ (ตัวรับ) น้อยกว่าปกติ ในกรณีนี้ หน้าสัมผัสการปิดของสวิตช์ความดัน 1RP ในวงจรของรีเลย์ 2RP จะปิดลง กระแสของขดลวดของรีเลย์ 2RP ไหล และหน้าสัมผัสการปิด 2RP ในวงจรของคอนแทคของสาย KL จะปิดลง
หลังจากเปิดคอนแทคเตอร์ KL ขดลวดของวาล์วอิเล็กโทรไฮดรอลิก 1KEG จะได้รับพลังงาน ซึ่งจ่ายน้ำหล่อเย็นให้กับคอมเพรสเซอร์ หลังจากนั้นครู่หนึ่งรีเลย์ RV จะรับพลังงานไปยังรีเลย์ 4RP ซึ่งจะเปิดวาล์ว 2KEG วาล์วนี้จะปิดทางออกของอากาศจากคอมเพรสเซอร์สู่ชั้นบรรยากาศ การหน่วงเวลาของรีเลย์ PB นั้นนานกว่าเวลาสตาร์ทเครื่องยนต์เล็กน้อย ดังนั้นวาล์ว 2KEG จึงเปิดอยู่และช่วยให้สตาร์ทเครื่องยนต์ได้ง่ายขึ้น
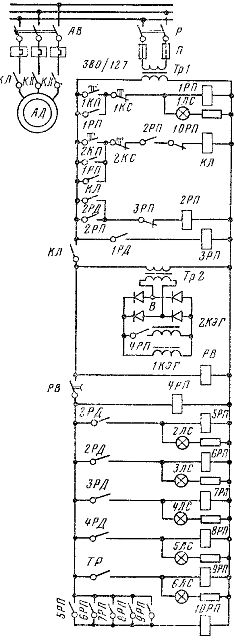
ข้าว. 2. ไดอะแกรมไดรฟ์ไฟฟ้าของคอมเพรสเซอร์แบบลูกสูบ
หากการไหลของอากาศต่ำและแรงดันในตัวรับเกินค่าปกติ หน้าสัมผัส 1RD ในวงจรรีเลย์ 3RP จะปิดลง หลังที่มีหน้าสัมผัสเปิดปิดรีเลย์ 2RP วงจรหน้าสัมผัส KL สูญเสียพลังงานและเครื่องยนต์ถูกตัดการเชื่อมต่อจากเครือข่ายเมื่อการไหลของอากาศเพิ่มขึ้นและความดันในตัวรับลดลงเมื่อเทียบกับค่าปกติสวิตช์ความดัน จะปิดหน้าสัมผัสบน 1RD และจะเปิดรีเลย์ 2RP ขดลวดคอนแทคเตอร์ KL จะถูกกระตุ้นอีกครั้งและคอมเพรสเซอร์จะเริ่มทำงานในลักษณะเดียวกับที่อธิบายไว้ข้างต้น
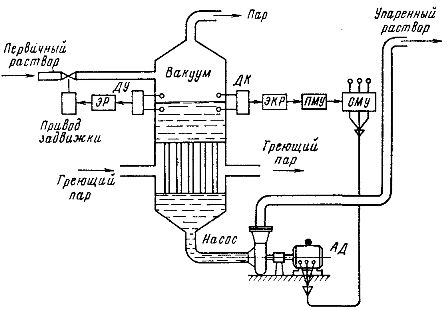
ข้าว. 3. แผนผังของโรงงานระเหยของเหลว
วงจรให้การดับเครื่องยนต์โดยอัตโนมัติหากแรงดันอากาศในตู้เย็น แรงดันของน้ำหล่อเย็นและน้ำมันที่จ่ายไปยังตลับลูกปืนหลัก และอุณหภูมิน้ำมันอยู่นอกช่วง พารามิเตอร์ที่ระบุถูกควบคุมโดยใช้สวิตช์ความดัน 2RD, 3RD, 4RD และรีเลย์อุณหภูมิ TP สัญญาณการปิดมอเตอร์ถูกป้อนผ่านรีเลย์ 5RP — 9RP ไปยังรีเลย์ 10RP ซึ่งจะทำการปิดคอนแทคเตอร์ KL ในกรณีฉุกเฉิน
ในรูป 3 แสดงไดอะแกรมของโรงงานระเหยของเหลวอัตโนมัติในกรณีนี้ ปั๊มจะรวมอยู่ในกระบวนการทางเทคโนโลยีหลักสำหรับการผลิตของเหลว สารละลายด่างจะระเหยในเครื่องแลกเปลี่ยนความร้อน ซึ่งความเข้มข้นของของเหลวจะเพิ่มขึ้นถึงระดับที่ต้องการ อุปกรณ์ทำงานภายใต้สุญญากาศเพื่อลดจุดเดือดของสารละลาย และลดความร้อนที่จ่ายให้กับอุปกรณ์โดยการให้ความร้อนด้วยไอน้ำ การเลือกของเหลวจากอุปกรณ์และการจ่ายของเหลวไปยังขั้นตอนต่อไปของการระเหยหรือไปยังถังรวบรวมจะดำเนินการอย่างต่อเนื่องด้วยความช่วยเหลือของปั๊ม ระดับความเข้มข้นของของเหลวที่ต้องการจะคงไว้โดยระบบควบคุมถาวร
ระบบประกอบด้วยเซ็นเซอร์สำหรับระดับการควบคุมและความเข้มข้นของของเหลว DC ในอุปกรณ์ ตัวควบคุมอิเล็กทรอนิกส์ ER และ EK R. วาล์วขับที่ทางเข้าของอุปกรณ์ และไดรฟ์ปั๊มไฟฟ้าที่ทางออก วัดความเข้มข้นของของเหลวด้วยเซ็นเซอร์อุณหภูมิสะพาน เนื่องจากอุณหภูมิของไออิ่มตัวเหนือของเหลวขึ้นอยู่กับความหนาแน่น
ระดับความเข้มข้นที่ต้องการถูกกำหนดด้วยโพเทนชิออมิเตอร์ในตัวควบคุมอิเล็กทรอนิกส์ EKR เมื่อความเข้มข้นเพิ่มขึ้นเมื่อเทียบกับระดับที่กำหนด แรงดันเอาต์พุตของ EKR และกระแสควบคุมของ PMU แอมพลิฟายเออร์แม่เหล็กระดับกลางจะเพิ่มขึ้น ความเร็วของมอเตอร์ปั๊มเพิ่มขึ้นและการไหลของปั๊มเพิ่มขึ้น สิ่งนี้นำไปสู่การลดเวลาการระเหยของของเหลวที่ไหลผ่านอุปกรณ์ ดังนั้นความเข้มข้นจึงเริ่มลดลง
เมื่อระดับของเหลวในเครื่องลดลงเนื่องจากการไหลของปั๊มเพิ่มขึ้น เซ็นเซอร์ระดับของรีโมทคอนโทรลผ่านตัวควบคุม ER จะส่งสัญญาณให้เปิดวาล์วทางเข้ามากขึ้นการไหลเข้าของสารละลายเพิ่มเติมช่วยฟื้นฟูระดับในอุปกรณ์และช่วยให้ระดับความเข้มข้นที่ตั้งไว้ล่วงหน้ากลับคืนมาได้เร็วที่สุด
ในรูป 4 แสดงไดอะแกรมของไดรฟ์ไฟฟ้าอัตโนมัติของปั๊มที่มีกำลังสูงถึง 7 — 10 กิโลวัตต์ ปั๊มขับเคลื่อนด้วยมอเตอร์เหนี่ยวนำแบบกรงกระรอก ความเร็วของมอเตอร์ถูกควบคุมโดยใช้แอมพลิฟายเออร์แม่เหล็กสามเฟส SMU ซึ่งรวมอยู่ในวงจรสเตเตอร์ หัวคงที่ขนาดใหญ่ของการติดตั้งช่วยให้มีช่วงที่จำเป็นในการปรับการไหลของปั๊มโดยการเปลี่ยนแปลงความเร็วของมอเตอร์เล็กน้อย
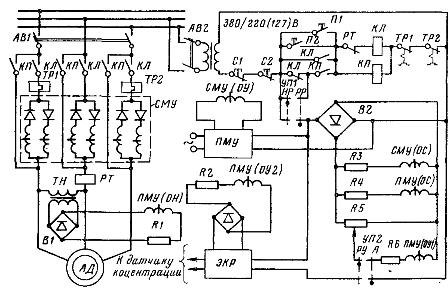
ข้าว. 4. ไดอะแกรมไดรฟ์ไฟฟ้าของปั๊มระเหย
เพื่อให้ได้คุณสมบัติเชิงกลที่เข้มงวดเพียงพอของไดรฟ์ไฟฟ้า นอกเหนือจากการต่อพ่วงกระแสบวกภายในที่สร้างขึ้นโดยขดลวดทำงานของ SMU แล้วยังมีการใช้การต่อพ่วงแรงดันลบ การใช้ PMU ทำให้สามารถเพิ่มกำลังขับของ EKR ให้อยู่ในระดับที่จำเป็นในการควบคุม SMU รวมถึงลดขนาดของหม้อแปลงแรงดันไฟฟ้า VT และเพิ่มความแข็งแกร่งของลักษณะทางกล เพื่อเพิ่มแรงบิดของเครื่องยนต์ในระหว่างการสตาร์ท เครื่องขยายสัญญาณแม่เหล็กจะถูกย้ายโดยคอนแทคกระปุกเกียร์
วงจรควบคุมเครื่องยนต์อนุญาตให้เริ่มและหยุดปั๊มจากแผงควบคุมหลักและจากตำแหน่งการติดตั้ง (ปุ่ม P1, P2, C1, C2) สวิตช์ UP1 ช่วยให้คุณตั้งค่าโหมดการทำงานของปั๊ม HP ที่ไม่ได้รับการควบคุมเมื่อ SMU ยังคงล้อมรอบด้วยคอนแทคเตอร์ KP และปั๊มจะพัฒนาประสิทธิภาพสูงสุด เช่นเดียวกับโหมด PP ที่ปรับได้ เมื่อ KP ที่ส่วนท้ายของการเริ่มต้นถูกปิดโดยรีเลย์ปัจจุบัน RT และขดลวดที่ใช้งานของ SMU จะถูกนำเข้าสู่ วงจรสเตเตอร์ เมื่อใช้สวิตช์ UP2 คุณสามารถเลือกโหมดการทำงานแบบปรับได้ของปั๊ม: อัตโนมัติ A หรือการควบคุมด้วยตนเองของ RU