โหนดของวงจรควบคุมอัตโนมัติเป็นฟังก์ชันของเวลา
 แม่เหล็กไฟฟ้า อิเล็กทรอนิกส์ มอเตอร์ และนิวแมติกไฟฟ้าถูกนำมาใช้กันอย่างแพร่หลายในวงจรอัตโนมัติ รีเลย์เวลา... รูปแบบการแปลงระยะเวลาของสัญญาณที่พบมากที่สุดจะแสดงในรูปที่ 1. แผนภาพ 1 และให้ชีพจรในช่วงเวลาหนึ่งโดยไม่คำนึงถึงระยะเวลาของการกด ปุ่ม เอส.บี. หลังจากกดปุ่ม SB รีเลย์ K จะเปิดใช้งานซึ่งให้แรงกระตุ้นในการเปิดกลไก ระยะเวลาของพัลส์ถูกกำหนดโดยการหน่วงเวลาของรีเลย์ KT ปุ่ม SB สามารถเปลี่ยนได้ด้วยรีเลย์คำสั่ง KQ
แม่เหล็กไฟฟ้า อิเล็กทรอนิกส์ มอเตอร์ และนิวแมติกไฟฟ้าถูกนำมาใช้กันอย่างแพร่หลายในวงจรอัตโนมัติ รีเลย์เวลา... รูปแบบการแปลงระยะเวลาของสัญญาณที่พบมากที่สุดจะแสดงในรูปที่ 1. แผนภาพ 1 และให้ชีพจรในช่วงเวลาหนึ่งโดยไม่คำนึงถึงระยะเวลาของการกด ปุ่ม เอส.บี. หลังจากกดปุ่ม SB รีเลย์ K จะเปิดใช้งานซึ่งให้แรงกระตุ้นในการเปิดกลไก ระยะเวลาของพัลส์ถูกกำหนดโดยการหน่วงเวลาของรีเลย์ KT ปุ่ม SB สามารถเปลี่ยนได้ด้วยรีเลย์คำสั่ง KQ
ไดอะแกรม 8, b (พร้อมรีเลย์ตั้งเวลาแม่เหล็กไฟฟ้า) และรูปที่ 1, c (พร้อมไทม์รีเลย์ไฟฟ้าหรือมอเตอร์) ใช้เพื่อจ่ายพัลส์ระยะสั้นหลังจากเริ่มการทำงานของสวิตช์การเคลื่อนที่ SQ ในรูปแบบเหล่านี้และรูปแบบที่ตามมา แทนที่จะเป็นผู้ติดต่อ สวิตช์เคลื่อนไหว สามารถใช้หน้าสัมผัสรีเลย์ KQ ได้
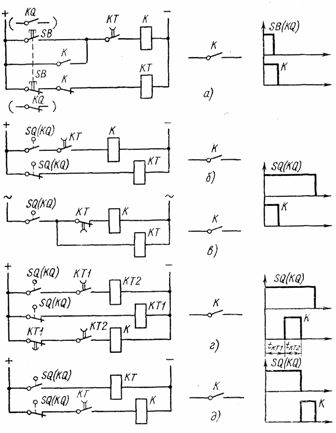
ข้าว. 1. วงจรแปลงระยะเวลาของสัญญาณ
โครงการมะเดื่อ1d ให้ระยะเวลาพัลส์ tKT2 พร้อมการหน่วงเวลา tKT1 หลังจากเริ่มการทำงานของสวิตช์ SQ
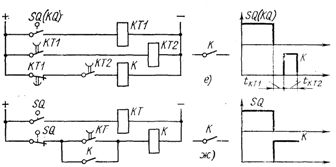
รูปที่โหนดวงจร 1, e. หากจำเป็นต้องใช้การหน่วงเวลา tKT1 ก่อนใช้พัลส์นี้ วงจรในรูปที่ 1, e. ระยะเวลาของพัลส์คือ tKT2
ในวงจรควบคุมตำแหน่ง วงจรของรูปที่ 1g ซึ่งทำหน้าที่ออกคำสั่งแบบยาวหลังจากสิ้นสุดผลกระทบที่สวิตช์การเดินทาง SQ คำสั่งนี้จะถูกยกเลิกเมื่อเริ่มการทำงานใหม่บนสวิตช์ SQ
สามารถรับการหน่วงเวลาสั้น ๆ (สูงสุด 1.5 วินาที) ได้โดยการเปิดและปิดตามปกติ รีเลย์ระดับกลาง เนื่องจากการสับเปลี่ยนขดลวดด้วยตัวเก็บประจุหรือไดโอด
ในแผนภาพของมะเดื่อ 2 และเมื่อปิดหน้าสัมผัส KQ รีเลย์ K จะทำงานโดยมีความล่าช้าตามเวลาที่กำหนดโดยเวลาในการชาร์จของตัวเก็บประจุ C เมื่อปิด KQ รีเลย์ K จะกลับมาพร้อมความล่าช้าเนื่องจากการคายประจุของตัวเก็บประจุ

ข้าว. 2. รับการหน่วงเวลาโดยการสับเปลี่ยนขดลวดของรีเลย์ระดับกลางด้วยตัวเก็บประจุหรือไดโอด
ในการรับการหน่วงเวลาเฉพาะเมื่อรีเลย์เปิดอยู่ ให้ใช้วงจรในรูปที่ 2, ข. ความล่าช้าเมื่อปิดรีเลย์นั้นไม่มีอยู่จริงเนื่องจากตัวเก็บประจุจะปล่อยประจุไปยังตัวต้านทาน R อย่างรวดเร็ว (ความต้านทานของตัวต้านทาน R นั้นน้อยกว่าความต้านทานของขดลวดรีเลย์ K) ปัญหาที่คล้ายกันได้รับการแก้ไขโดยวงจรในรูปที่ 2c ซึ่งใช้หน้าสัมผัสเปิดเดียวของรีเลย์ KQ ข้อเสียของวงจรนี้คือการสูญเสียพลังงานอย่างมีนัยสำคัญผ่านตัวต้านทานในกรณีที่ไม่มีสัญญาณ
โครงการในรูปที่ 2d เมื่อหน้าสัมผัส KQ เปิดขึ้น รีเลย์ K จะปิดด้วยการหน่วงเวลาที่ควบคุมโดยตัวต้านทาน R
ตามแผนภาพในรูป 2 e การหน่วงเวลาจะถูกสร้างขึ้นเมื่อ K ปิดหลังจากที่หน้าสัมผัสของรีเลย์คำสั่ง KQ ถูกปิด
หากจำเป็นต้องมีการหน่วงเวลาเล็กน้อยในการส่งคืนรีเลย์ K เมื่อเปิดใช้งานคำสั่งรีเลย์ KQ ไดอะแกรมในรูปที่ 2, e ซึ่งขดลวดของรีเลย์ K ถูกปัดโดยไดโอด
รูปแบบการสร้างพัลส์ของระยะเวลาและรอบการทำงานที่กำหนดจะแสดงในรูปที่ 3, ก. ระยะเวลาของพัลส์ถูกกำหนดโดยการหน่วงเวลาของรีเลย์ KT2 การหยุดชั่วคราวถูกกำหนดโดยเวลาหน่วงของรีเลย์ KT1
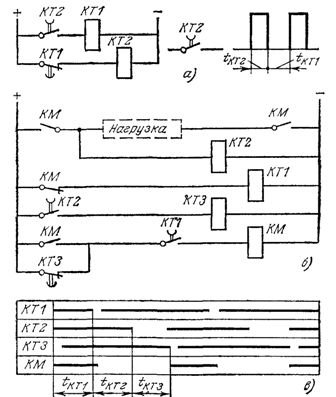
ข้าว. 3. วงจรรีเลย์สำหรับสร้างพัลส์
ในรูป 3, b, ไดอะแกรมของการเปิดสวิตช์เป็นระยะของกลไกพร้อมเวลาหยุดชั่วคราวที่เพิ่มขึ้น เวลาเปิดของ KM คอนแทคเท่ากับการหน่วงเวลาของรีเลย์ KT1 ระยะเวลาของการหยุดชั่วคราวคือผลรวม ความล่าช้าของรีเลย์ KT2 และ KTZ แผนภาพเวลาแสดงในรูปที่ 3, ค.
แผนผังของเครื่องกำเนิดพัลส์ของรีเลย์เวลาหรือ องค์ประกอบเชิงตรรกะ (ดูด้านล่าง) ยังใช้เพื่อควบคุมความเร็วของการทำงานของกลไกเชิงเส้น ตัวควบคุมอุณหภูมิก็แพร่หลายเช่นกัน ซึ่งมีอุปกรณ์สั่งการ KEP-12U ในลักษณะต่างๆ คล้ายกับรีเลย์ตั้งเวลาเครื่องยนต์ หน่วยนี้มีมอเตอร์ผู้บริหาร เกียร์แปรผัน ลูกเบี้ยว สวิตช์ และหน้าสัมผัส 12
ตัวควบคุมความเร็วมักใช้แบบแผนสำหรับการทำงานแบบวนรอบของอุปกรณ์ KEP-12U (รูปที่ 4, a) วงจรนี้ทำขึ้นโดยใช้รีเลย์ K1 และ K2 และหน้าสัมผัสของอุปกรณ์คำสั่ง KT.1 และ KT.2 ซึ่งแผนภาพวงจรจะแสดงในรูปที่ 4, ข.
ก่อนเริ่มงาน ให้เปิดสวิตช์ Sเมื่อปิดหน้าสัมผัสรีเลย์ KQ ชั่วครู่ ให้คำสั่งเริ่มรอบการทำงาน รีเลย์ K1 จะทำงานและล็อกตัวเอง รีเลย์ K2 เปิดใช้งานโดยการเปิดอุปกรณ์คำสั่ง KT ขดลวดมอเตอร์ LM1 และ LM2 ได้รับพลังงานและดรัมลูกเบี้ยวเริ่มหมุน หน้าสัมผัสเอาต์พุตของอุปกรณ์ KT.3, KT.4 และอื่น ๆ ปิดตามลำดับในช่วงเวลาที่กำหนด (ดูแผนภาพในรูปที่ 4, b) ให้คำสั่งเพื่อเปิดกลไกเชิงเส้น ในช่วงกลางของรอบ หน้าสัมผัส KT.1 จะเปิดขึ้น และรีเลย์ K1 จะปิด
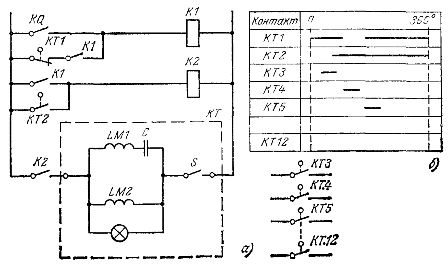
รูปที่ 4 ตัวควบคุมความเร็วสายด้วยอุปกรณ์ KEP-12U
รีเลย์คอยล์ K2 รองรับแหล่งจ่ายไฟผ่านหน้าสัมผัสของอุปกรณ์ KT.2 หลังจากหมุนดรัมเป็นมุม 360 ° หน้าสัมผัส KT.2 จะเปิดขึ้น มอเตอร์ของอุปกรณ์ KEP-12U จะหยุดทำงาน โซ่พร้อมสำหรับรอบต่อไป
โดยสรุปเราจะพิจารณาสองรูปแบบสำหรับการควบคุมระยะไกลของการหน่วงเวลาของรีเลย์เวลาแม่เหล็กไฟฟ้า
หากต้องการเปลี่ยนการหน่วงเวลาจากแผงควบคุม คุณสามารถใช้วงจรรีเลย์สองคอยล์ที่มีคอยล์ทริกเกอร์ KT.1 และคอยล์กลับ KT 2 (ล้างอำนาจแม่เหล็ก) ซึ่ง MDS กำกับตรงกันข้าม (รูปที่ 5, a) MDS ของรีลีสคอยล์ถูกปรับโดยใช้โพเทนชิออมิเตอร์ RP เพื่อหลีกเลี่ยงการทำงานซ้ำๆ ของ CT หลังจากการกลับรายการและตัดการทำงานของแม่เหล็ก MDS ของขดลวดตัดต้องน้อยกว่า MDS ที่เพียงพอที่จะดึงกระดอง หรือต้องใส่หน้าสัมผัสปิดรีเลย์ของตัวเองในขดลวดวงจร (รูปที่ 5, ก).
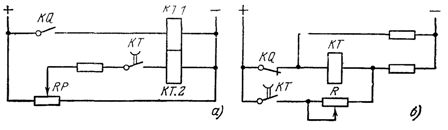
รูปที่ 5 แผนผังสำหรับการปรับระยะไกลของการหน่วงเวลารีเลย์
ตามแผนภาพในรูป5, b ทำการเปลี่ยนแปลงระยะไกลในการหน่วงเวลาของรีเลย์คอยล์เดี่ยว เมื่อหน้าสัมผัส KQ เปิดขึ้น ขดลวดรีเลย์ KT จะไหลไปรอบๆ ด้วยกระแสดีเกาส์ซึ่งควบคุมโดยตัวต้านทาน R เมื่อกระแสดีเกาส์เพิ่มขึ้น การหน่วงเวลาของรีเลย์จะลดลง และในทางกลับกัน ด้วยแรงดันไฟฟ้า 220 V จะใช้รีเลย์พร้อมขดลวดสำหรับแรงดันไฟฟ้า 110 V