วงจรไฟฟ้าของไดรฟ์ไฟฟ้าของเครนเหนือศีรษะที่ทำงานจากพื้น
ไดอะแกรม Faucet และคุณสมบัติการป้องกัน
 ในอุตสาหกรรม ในระหว่างการขนส่งและการจัดเก็บที่มีความหนาแน่นต่ำ ในห้องเครื่องจักรและห้องทดลอง เครนเหนือศีรษะจำนวนมากจะถูกใช้ โดยทำงานเป็นระยะๆ หรือมีจำนวนรอบการยก 6 - 10 รอบต่อชั่วโมง การใช้ผู้ปฏิบัติงานเต็มเวลาสำหรับเครนดังกล่าวนั้นไม่คุ้มค่าทางเศรษฐกิจ นี่คือสาเหตุที่จำนวนเครนเหนือศีรษะทำงานจากพื้นเพิ่มมากขึ้น
ในอุตสาหกรรม ในระหว่างการขนส่งและการจัดเก็บที่มีความหนาแน่นต่ำ ในห้องเครื่องจักรและห้องทดลอง เครนเหนือศีรษะจำนวนมากจะถูกใช้ โดยทำงานเป็นระยะๆ หรือมีจำนวนรอบการยก 6 - 10 รอบต่อชั่วโมง การใช้ผู้ปฏิบัติงานเต็มเวลาสำหรับเครนดังกล่าวนั้นไม่คุ้มค่าทางเศรษฐกิจ นี่คือสาเหตุที่จำนวนเครนเหนือศีรษะทำงานจากพื้นเพิ่มมากขึ้น
คุณลักษณะของเครนสะพานที่ควบคุมจากพื้นคือความเป็นไปได้ในการเข้าถึงเครนเพื่อซ่อมแซมและควบคุมเฉพาะในสถานที่ที่กำหนดเป็นพิเศษพร้อมกับพื้นที่ที่เหมาะสมสำหรับการตรวจสอบกลไกและอุปกรณ์ไฟฟ้า ดังนั้นระบบป้องกันอุปกรณ์ไฟฟ้าทั้งหมดของปั้นจั่นจึงต้องสร้างในลักษณะที่สามารถนำปั้นจั่นภายใต้สภาวะฉุกเฉินไปยังพื้นที่ซ่อมแซมภายใต้การควบคุมจากพื้นและในกรณีที่ไม่มีปั้นจั่นในวงจร ไฟฟ้าลัดวงจรและความผิดปกติของกราวด์.
ในเรื่องนี้ บนปั้นจั่นแบบตั้งพื้น เบรกเกอร์วงจร ไม่ได้ติดตั้งวงจรหลักได้รับการป้องกันโดยสวิตช์เปิดปิดอัตโนมัติ รถเข็นพื้นฐานและการป้องกันวงจรควบคุม — ฟิวส์ สำหรับกระแส 15 A, 380 V พร้อมหน้าตัดของตัวนำของวงจรควบคุม 2.5 mm2 มีการป้องกันโอเวอร์โหลดของไดรฟ์ไฟฟ้าของกลไก รีเลย์ความร้อน ในวงจรหลักของเครื่องยนต์
เพื่อให้ faucet สามารถเคลื่อนที่ได้หลังจากเปิดใช้งานการป้องกันความร้อน หน้าสัมผัสรีเลย์จะเชื่อมต่อกับปุ่มบนแผงควบคุม วาล์วติดตั้งไฟสัญญาณสำหรับแรงดันไฟฟ้าที่อินพุต, แรงดันไฟฟ้าหลังคอนแทคสำหรับการป้องกันสายและไฟสัญญาณสำหรับการทำงานของการป้องกันความร้อน
แผนภาพไฟฟ้าของกลไกการเคลื่อนที่ของเครนเหนือศีรษะ
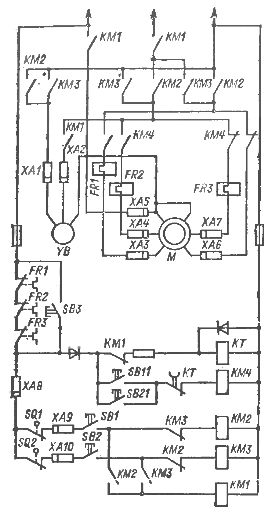
ในรูป 1 แสดงไดอะแกรมของไดรฟ์ไฟฟ้าที่เคลื่อนที่ภายใต้การควบคุมการลัดวงจรของมอเตอร์ความเร็วเดียว
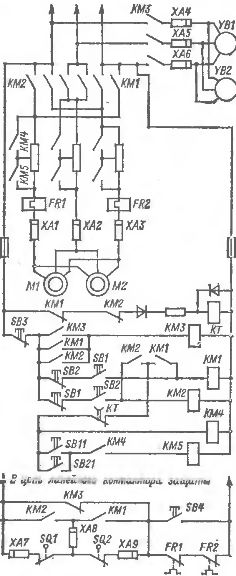
ข้าว. 1. รูปแบบของไดรฟ์ไฟฟ้า (พร้อมมอเตอร์กรงกระรอกความเร็วเดียว) ของกลไกการเคลื่อนที่ของเครนเมื่อใช้งานจากพื้น: M1, M2 — มอเตอร์ไฟฟ้า, YB1, YB2 — แม่เหล็กไฟฟ้าของเบรกหรือตัวดันไฮดรอลิก KM1, KM2 — คอนแทคทิศทาง, KM4, KM5 - คอนแทคตัวต้านทานในวงจรสเตเตอร์, KMZ - คอนแทคเบรก, KT - รีเลย์เวลาเริ่มต้น, FR1, FR2 - รีเลย์ความร้อน, SQ1, SQ2 - ลิมิตสวิตช์, SB1, SB2 - ปุ่มทิศทางการเคลื่อนที่ (สองปุ่ม - ทาง), SB11, SB21 — ปุ่มเริ่ม, SB3 — ปุ่มหยุดการเคลื่อนที่แบบอิสระ, SB4 — ปุ่มบายพาสป้องกันความร้อน, XA1 — XA9 — หน้าสัมผัสของรถเข็นถ่ายโอนปัจจุบัน
วงจรนี้ออกแบบมาเพื่อขับเคลื่อนโบกี้เครนที่มีน้ำหนักบรรทุก 3-20 ตัน และเครนขับเคลื่อนสำหรับเครนที่มีน้ำหนักบรรทุก 2-5 ตัน ขดลวดสเตเตอร์ของมอเตอร์กรงกระรอกถูกป้อนจากไฟหลักผ่านสองขั้นตอนของ ตัวต้านทาน ลักษณะทางกลของไดรฟ์แสดงในรูปที่ 2, ก.
การควบคุมไดรฟ์ไฟฟ้า — จากปุ่มที่ถูกระงับ การควบคุมประกอบด้วยปุ่มสองทิศทางหลักสองปุ่ม SB1 และ SB2 ซึ่งให้คำสั่งให้เคลื่อนที่ในสองทิศทาง การเปลี่ยนไปยังตำแหน่งโดยไม่ต้องปรับตัวต้านทานจะดำเนินการเมื่อมีการออกคำสั่งโดยใช้ปุ่ม SB11, SB21
เมื่อเครื่องยนต์เปิดอยู่ กำลังไฟไปยังไดรฟ์เบรก YB จะถูกส่งผ่านหน้าสัมผัสของคอนแทค KM1, KM2 ผ่านหน้าสัมผัสของ KMZ หลังจากปิดมอเตอร์ไฟฟ้า ระบบขับเคลื่อนเบรกจะยังคงรับพลังงานต่อไป และกลไกจะมีระยะฟรี ในการปลดเบรก ให้ใช้ปุ่ม SB3 ซึ่งใช้ร่วมกันกับโบกี้และกลไกเพลา เมื่อทริกเกอร์ ลิมิตสวิตช์ SQ1 และ SQ2 คอนแทคสายป้องกันถูกสะดุดและซ้อนทับ เบรกเชิงกล.
เพื่อให้ไฟฟ้า เบรกตรงข้าม หลังจากใช้ฟรีบูตแล้ว รีเลย์เวลา CT โดยมีการหน่วงเวลา 2-3 วินาที ซึ่งจะทำให้การขับเคลื่อนช้าลงไปยังตำแหน่งที่มีแรงบิดเริ่มต้น (เบรก) น้อยที่สุด
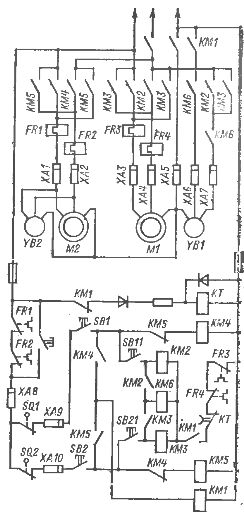
ในรูป 3 แสดงไดอะแกรมของไดรฟ์ไฟฟ้าสำหรับการเคลื่อนที่ของเครนเหนือศีรษะ (รถเข็น) ด้วยความช่วยเหลือ มอเตอร์กรงกระรอกความเร็วสองระดับ… มอเตอร์มีขดลวดสองเส้นแยกกันโดยมีอัตราส่วนขั้ว



ปุ่ม SB1 หรือ SB2 รวมถึงคอนแทคเตอร์ทิศทาง KM1, KM2 และคอนแทคเตอร์ความเร็วต่ำ KM4 หลังจากจ่ายพลังงานให้กับขดลวดความเร็วต่ำของมอเตอร์ผ่านคอนแทค KMZ แล้วตัวกระตุ้นเบรก YB1, YB2 จะได้รับพลังงานหากต้องการเปลี่ยนเป็นความเร็วสูง ปุ่มสองทาง SB ปิดหน้าสัมผัส SB11, SB21 (ตำแหน่งที่สอง) และเปิดคอนแทค KM6
ขดลวดความเร็วสูงเชื่อมต่อกับกริดผ่านตัวต้านทานในเวลาเดียวกันกับขดลวดความเร็วต่ำ จากนั้นขดลวดความเร็วต่ำจะถูกปิด หลังจากการหน่วงเวลาของรีเลย์ KT (2-5 วินาที) คอนแทค KM5 จะเปิดขึ้นและมอเตอร์จะเข้าสู่โหมดความเร็วสูงตามธรรมชาติ (รูปที่ 2, b)
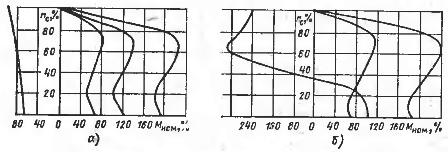
ข้าว. 2. ลักษณะทางกลของไดอะแกรม 13
เมื่อมอเตอร์ถูกตัดการเชื่อมต่อจากแหล่งจ่ายไฟหลัก ตัวกระตุ้นเบรกจะยังคงรับพลังงานต่อไปและเกิดการลื่นไถล สามารถใช้เบรกไฟฟ้าได้เมื่อเปลี่ยนจากความเร็วสูงเป็นความเร็วต่ำ หากต้องการปลดเบรก เพียงกดปุ่ม SB3
เมื่อการป้องกันครั้งสุดท้ายถูกกระตุ้นโดยการเปิด คอนแทคสายบนแผงป้องกัน มอเตอร์ไฟฟ้าปิดอยู่และเบรกเชิงกลทำงาน กลไกถูกยับยั้งด้วยความเข้มสูงสุด
เนื่องจากการใช้ตัวต้านทานในวงจรสำหรับขดลวดความเร็วสูง การสตาร์ทที่ค่อนข้างนุ่มนวลจะดำเนินการภายใต้การควบคุมของไทม์รีเลย์ KT แต่แรงบิดในการเบรกของขดลวดความเร็วต่ำนั้นไม่จำกัด และในกรณีนี้ ซอฟต์ การเบรกทำได้โดยใช้สวิตช์พัลส์หลายปุ่มของปุ่ม SB1 หรือ SB2
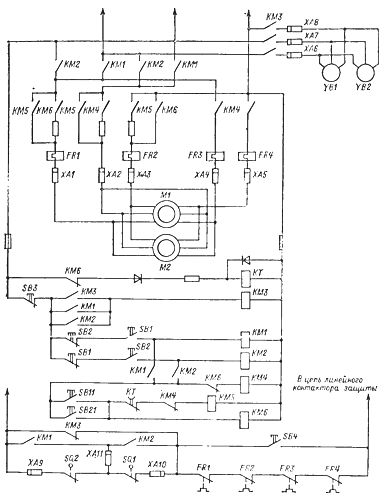
ข้าว. 3. ไดอะแกรมของไดรฟ์ไฟฟ้า (พร้อมมอเตอร์กรงกระรอกความเร็วสองระดับ) ของกลไกการเคลื่อนที่ของเครนเมื่อใช้งานจากพื้น: M1M2 - มอเตอร์ไฟฟ้า, YB1, YB2 - ไดรฟ์เบรก, KM1, KM 12 - คอนแทคสำหรับทิศทางการเดินทาง, KMZ - คอนแทคเบรก, KM4 - คอนแทคความเร็วต่ำ, KM5 - คอนแทคความเร็วสูง, KM6 - คอนแทคตัวต้านทานในวงจรสเตเตอร์ FRI, FR2 , FR3 — รีเลย์ระบายความร้อน, KT — รีเลย์ควบคุมเวลาทำงาน, SQ1, SQ2 — ลิมิตสวิตช์, SB1, SB2 — ปุ่มทิศทางการเดินทาง (สองทิศทาง): SB11, SB21 — ปุ่มความเร็วสูง (ตำแหน่งปุ่มที่สอง SB1, SB2), СВЗ — ปล่อยปุ่มหยุดอิสระ, SB4 — ปุ่มบายพาสป้องกันความร้อน, ХА1- ~ ХЛ11 — หน้าสัมผัสของรถเข็นเกียร์ปัจจุบัน
ในรูป 4 แสดงไดอะแกรมของกลไกการเคลื่อนที่ของเครนเหนือศีรษะโดยใช้มอเตอร์ความเร็ว 2 ระดับโดยไม่มีท่อระบายฟรี วงจรแตกต่างจากวงจรที่พิจารณาโดยการรวมลำดับของขดลวดความเร็วต่ำและความเร็วสูงและข้อ จำกัด บางประการของแรงบิดในการเบรกเมื่อต่อขดลวดเป็นอนุกรม โครงร่างนี้แนะนำสำหรับเครนเหนือศีรษะที่ทำงานกลางแจ้ง
แผนภาพการเชื่อมต่อกลไกการยกของปั้นจั่น
ในรูป 5 แสดงวงจรควบคุมสำหรับรอกไฟฟ้าที่ใช้มอเตอร์แบบกรงกระรอกความเร็ว 2 ระดับพร้อมขดลวดอิสระ 2 เส้นที่มีอัตราส่วนจำนวนขั้ว 4/24 และ 6/16 วงจรนี้สร้างขึ้นจากหลักการของการแตกสองครั้งจากอุปกรณ์อิสระสองตัวของวงจรหลักของขดลวดของมอเตอร์ไฟฟ้าและวงจรของไดรฟ์เบรกซึ่งให้ความน่าเชื่อถือที่จำเป็นของไดรฟ์รอก
ขดลวดความเร็วต่ำของมอเตอร์ไฟฟ้ารับพลังงานผ่านหน้าสัมผัสของคอนแทคไลน์ KM1, หน้าสัมผัสของคอนแทคทิศทาง KM2, KMZ และหน้าสัมผัสขัดจังหวะของคอนแทค KM4 หลังจากกดปุ่ม SB1, SB2 (ตำแหน่งแรก)
ข้าว. 4. รูปแบบของไดรฟ์ไฟฟ้า (พร้อมมอเตอร์กรงกระรอกความเร็วสองระดับ) ของกลไกการเคลื่อนที่ของเครน: M - มอเตอร์ไฟฟ้า, YB - ไดรฟ์เบรก, KM1, KM2 - คอนแทคสำหรับทิศทางการเคลื่อนที่, KMZ - ความเร็วต่ำ คอนแทค, KM4 — คอนแทคความเร็วสูง, KM5 — คอนแทคตัวต้านทานความเร็วสูง, CT — รีเลย์ควบคุมเวลาเริ่มต้น, FR4 — รีเลย์ระบายความร้อน, SQ1, SQ2 — ลิมิตสวิตช์, SB1, SB2 — ปุ่มทิศทางการเคลื่อนที่, SB11, SB21 — สูง ปุ่มความเร็ว, SB3 — ปุ่มบายพาสเทอร์มอลรีเลย์, XA1 -XA10 — หน้าสัมผัสถ่ายโอนปัจจุบัน
เมื่อกดปุ่ม SB11 (SB21) คอยล์ของคอนแทค KM4 จะได้รับพลังงาน จะเปลี่ยนจากความเร็วต่ำเป็นความเร็วสูงโดยมีการหยุดชะงักของพลังงานน้อยที่สุด ในกรณีนี้ จะไม่มีตำแหน่งเมื่อขดลวดความเร็วสูงและความเร็วต่ำถูกปิดใช้งาน การเปลี่ยนจากการม้วนความเร็วต่ำเป็นการม้วนความเร็วสูงนั้นดำเนินการภายใต้การควบคุมของรีเลย์เวลา KT เมื่อเปิดใช้งานการป้องกันขีดจำกัด ขดลวดมอเตอร์และเบรกจะทำงานสองครั้ง
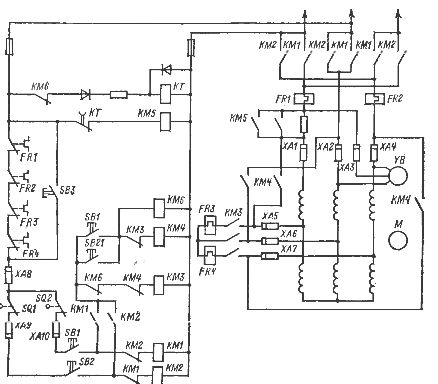
ในรูป 6 แสดงไดอะแกรมของไดรฟ์ไฟฟ้าของกลไกการยกที่มีมอเตอร์ไฟฟ้าลัดวงจรสองตัวเชื่อมต่อกันและกระปุกเกียร์ผ่านเฟืองดาวเคราะห์ที่มีอัตราทดเกียร์ 6-8 มอเตอร์ไฟฟ้าความเร็วต่ำ M2 เปิดทำงานตลอดเวลาของกลไก มอเตอร์ความเร็วสูงทำงานระหว่างการทำงานด้วยความเร็วสูงมอเตอร์ไฟฟ้าความเร็วต่ำมีเบรกในตัว
ข้าว. 5. แผนผังของไดรฟ์ไฟฟ้า (พร้อมมอเตอร์กรงกระรอกความเร็วสองระดับ) ของกลไกการยกเมื่อใช้งานจากพื้น: M — มอเตอร์ไฟฟ้า, YB — คอยล์เบรก, KM1 — คอนแทคดอกลิลลี่, KM2 — KMZ — คอนแทคทิศทาง KM4 — คอนแทคเตอร์สำหรับเปลี่ยนความเร็ว, FR1 — FR3 — รีเลย์ระบายความร้อน, CT — รีเลย์ควบคุมความเร่ง, SQ1, SQ2 — ลิมิตสวิตช์, SB1, SB2 — ปุ่มทิศทาง (สองทาง) SB3 — ปุ่มสำหรับสับเปลี่ยนรีเลย์ระบายความร้อน, SB11, SB21 — ปุ่มความเร็วสูง (ตำแหน่งที่สองของปุ่ม SB1, SB2), XA1 — XA10 — หน้าสัมผัสของรถเข็นถ่ายโอนปัจจุบัน
ข้าว. 6. รูปแบบของไมโครมอเตอร์ของกลไกการยกเมื่อทำงานจากพื้น: M1 - มอเตอร์ไฟฟ้าความเร็วสูง, M2 - มอเตอร์ไฟฟ้าความเร็วต่ำ, YB1 - คอยล์เบรกความเร็วสูง, YB2 - คอยล์เบรกมอเตอร์ความเร็วต่ำ, KM1 - คอนแทคเชิงเส้น, KM2 - KMZ - รอบการหมุนของคอนแทคทิศทางสูง, KM4, KM5 - คอนแทคความเร็วต่ำ, KM6 - คอนแทคเบรกความเร็วสูง, KT - รีเลย์ควบคุมเวลาเริ่มต้น, SQ1, SQ2 - ลิมิตสวิตช์, FR1 - FR4 - รีเลย์ความร้อน SB1, SB2 - ปุ่มทิศทางสองทิศทาง , SB11, SB21 — ปุ่มความเร็วสูง (ตำแหน่งที่สองของปุ่ม SB1, SB2), XA1— XA10 — หน้าสัมผัสของรถเข็นถ่ายโอนปัจจุบัน
มอเตอร์ไฟฟ้าความเร็วสูงมีเบรกแยกต่างหากซึ่งทำงานโดย ทรัสเตอร์ไฟฟ้าไฮดรอลิก… เมื่อกดปุ่มทิศทาง SB1 (SB2) คอนแทคเตอร์คอยล์ KM4 (KM5) จะทำงานและมอเตอร์ความเร็วต่ำจะเปิดขึ้น ในเวลาเดียวกัน คอนแทคสายทั่วไป KM1 จะเปิดอยู่
เมื่อกดปุ่ม SB1 (SB2) จนสุด หน้าสัมผัส SB11 (SB21) จะปิด คอยล์ของคอนแทค KM2 (KMZ) และ KM6 จะถูกกระตุ้น แต่หลังจากเวลาเริ่มต้นความเร็วต่ำภายใต้การควบคุมของรีเลย์ KT หมดลง , มอเตอร์ความเร็วสูงเปิดอยู่
เมื่อชะลอความเร็วขึ้นหรือลงหลังจากปิดมอเตอร์ความเร็วสูงแล้ว เบรก YB1 จะดำเนินการเบรกที่ความเร็วต่ำ หลังจากสั่งงานลิมิตสวิตช์ SQ1 และ SQ2 ไดรฟ์ไฟฟ้าจะปิดด้วยวงจรเปิดคู่ของมอเตอร์และเบรก
โครงร่างที่อธิบายไว้ทั้งหมดตามข้อกำหนดสำหรับการเปิดใช้งานกลไกเครนเมื่อทำงานจากพื้นโดยกดปุ่มอย่างต่อเนื่องเท่านั้น เมื่อปิดการป้องกันประเภทใด ๆ กลไกจะหยุดทำงานโดยไม่คำนึงถึงสถานะของปุ่มควบคุม อุปกรณ์.
รูปแบบการพิจารณาในรูปที่ 2-5 สามารถประกอบได้ตั้งแต่ สตาร์ตเตอร์แม่เหล็กมาตรฐาน พิมพ์ PMA, PML และรีเลย์เวลา ข้อยกเว้นคือไดอะแกรมในรูปที่ 2 ซึ่งใช้คอนแทคเตอร์เพื่อเปลี่ยนรอบ ดีซีคอนแทค MK1-22, 40 A, 380 V, คอยล์ 220 V. ตามรูปแบบที่ระบุ แผงควบคุมสำหรับมอเตอร์ที่มีกำลัง 0.8 ถึง 2×8.5 กิโลวัตต์ และแผงควบคุมสำหรับมอเตอร์ยกที่มีกำลัง 10 ถึง 22 กิโลวัตต์ พัฒนาขึ้น