วงจรควบคุมไดรฟ์ไฟฟ้า
 ขึ้นอยู่กับความเร็วของลิฟต์โดยสาร วงจรควบคุมพลังงานประเภทต่อไปนี้ถูกนำมาใช้:
ขึ้นอยู่กับความเร็วของลิฟต์โดยสาร วงจรควบคุมพลังงานประเภทต่อไปนี้ถูกนำมาใช้:
-
ลิฟต์ความเร็วต่ำมีกรงกระรอกหรือมอเตอร์เฟสโรเตอร์และปุ่มหรือคันโยกควบคุม
-
ลิฟต์ความเร็วสูง - มอเตอร์ความเร็วสองหรือความเร็วเดียวควบคุมโดยสถานีแม่เหล็กหรือสถานีควบคุมไทริสเตอร์ (TSU-R) พร้อมปุ่มควบคุม
-
ลิฟต์ความเร็วสูงและความเร็วสูง - มอเตอร์กระแสตรงควบคุมโดยระบบ "เครื่องกำเนิดไฟฟ้า - มอเตอร์" พร้อมรูปแบบการกระตุ้นที่แตกต่างกันหรือโดยระบบ "ไทริสเตอร์คอนเวอร์เตอร์ - มอเตอร์" พร้อมปุ่ม
-
นอกจากนี้ยังสามารถใช้โซ่ของ asynchronous valve cascades (AVK) ซึ่งช่วยให้สามารถเพิ่มประสิทธิภาพได้ การติดตั้ง.
ลิฟต์โดยสารขึ้นอยู่กับการไหลของผู้โดยสาร ความสูงในการยก และจำนวนลิฟต์ที่ให้บริการผู้โดยสาร แบ่งออกเป็นการควบคุมแบบเดี่ยวและแบบกลุ่ม
คนโสดรวมถึง:
ก) ลิฟต์ทำงานตามคำสั่งเดียวและการโทรโดยไม่หยุดข้ามระหว่างการลงและขึ้นของผู้โดยสาร
b) ลิฟต์ที่มีผู้โดยสารขึ้นเมื่อลง แต่ห้ามเรียกเมื่อขึ้นไป
c) เหมือนกัน แต่มีการลงทะเบียนการโทรเมื่อลงมาพร้อมกับการดำเนินการที่ตามมา
ลิฟต์ที่ดำเนินการเป็นกลุ่มประกอบด้วย:
ก) ลิฟต์ด้วยปุ่มเดียวสำหรับเรียกสถานที่ลงจอดโดยไม่คำนึงถึงจำนวนลิฟต์ที่ติดตั้ง (มักใช้การควบคุมสองครั้ง) และการขึ้นเครื่องของผู้โดยสารเมื่อลง
b) เหมือนกัน แต่มีการรวบรวมผู้โดยสารทั้งหมดบนชั้นกลางสำหรับการขึ้นและลงจากเครื่อง (โดยปกติจะติดตั้งในอาคารบริหาร การศึกษา และอาคารอื่นๆ)
นอกจากนี้ เป็นเรื่องปกติมากที่จะส่งลิฟต์ไปยังบ้านหลายหลังและละแวกใกล้เคียงทั้งหมด เมื่อมีการตรวจสอบสถานะของวงจรจากคอนโซลควบคุมหนึ่งตัวและลิฟต์หลายตัวถูกควบคุม
โดยไม่คำนึงถึงความเร็วของลิฟต์ การควบคุมแบบเดี่ยวหรือแบบกลุ่ม องค์ประกอบที่จำเป็นของโครงร่างส่วนใหญ่มีดังนี้:
-
ปุ่มปรับเอง ปุ่มติดหรือปุ่มปิดสำหรับเรียกรถแท็กซี่และสั่งการจากห้องโดยสาร
-
เซ็นเซอร์การเลือกต่างๆ และอุปกรณ์จับคู่การหยุดที่แม่นยำเพื่อลงทะเบียนตำแหน่งของห้องโดยสารและสถานะของวงจรไฟฟ้า
-
เซ็นเซอร์และอินเตอร์ล็อกสำหรับสถานะของเชือกรอก สถานะของเหมืองและประตูห้องโดยสาร (เปิดหรือปิด)
-
ลิมิตสวิตช์เพื่อจำกัดความเร็วและระดับของน้ำหนักบรรทุกในห้องโดยสาร
-
ตัวบ่งชี้ทิศทางการเคลื่อนที่ของรถและในลิฟต์บางตัวแสดงว่ามีของอยู่ในรถ
จากรายการเหล่านี้ เราจะให้รายละเอียดเพิ่มเติมเกี่ยวกับอุปกรณ์จับคู่ตำแหน่ง (PSC) ซึ่งกำหนดตำแหน่งที่รถเหมืองต้องหยุดเมื่อมีการโทรหรือคำสั่ง และการเคลื่อนที่ขึ้นหรือลงรายการที่เหลือมักจะเป็นการดัดแปลงลิมิตสวิตช์ต่างๆ ที่ทราบจากหลักสูตรอื่น
โครงสร้าง อุปกรณ์จับคู่ตำแหน่งถูกนำมาใช้ในรูปแบบของชุดเซ็นเซอร์ไฟฟ้าเชิงกลหรือเซ็นเซอร์เหนี่ยวนำหรือแม่เหล็ก (กก) สามตำแหน่งที่อยู่ในเหมือง โดยมีสัญญาณส่งออกไปยังรีเลย์หรือตัวเลือกแบบไม่สัมผัสในห้องเครื่องยนต์ (บางครั้ง CCP จะถูกนำไปใช้ ในรูปแบบยูนิตชั้นกลางที่อยู่บริเวณห้องเครื่อง) …
เซ็นเซอร์ที่อยู่ในเหมืองจะโต้ตอบกับกิ่งไม้ที่ติดตั้งในห้องโดยสาร (สำหรับระบบเครื่องกลไฟฟ้า) หรือตัวสับแม่เหล็ก (สำหรับสวิตช์แบบเหนี่ยวนำหรือสวิตช์กก) และส่งสัญญาณไปยังยูนิตพื้นส่วนกลาง (ตัวถ่ายเอกสารแบบขั้นบันไดหรือรีเลย์รีเลย์) ที่ติดตั้งในห้องเครื่องยนต์ และ หลังส่งสัญญาณและวงจรควบคุม - สัญญาณเพื่อดำเนินการตามคำสั่งที่ได้รับ
เป็นการสมควรกว่าที่จะวางเซ็นเซอร์สำหรับสัญญาณการเคลื่อนที่ของรถขึ้นหรือลงรถ (ต้องใช้สายไฟน้อยลง) และติดตั้งเครื่องแยกแม่เหล็กในเหมืองตามจุดที่จำเป็น ในกรณีนี้ ด้วยการควบคุมแบบดิจิทัล จำนวนคอลัมน์ที่มีตัวสับเปลี่ยนที่ติดตั้งไว้ตามเพลาจะเท่ากับจำนวนบิตของหมายเลขชั้นที่ส่งในรหัสไบนารีหรือรหัสอื่นๆ
สวิตช์เครื่องกลไฟฟ้าแบบสามตำแหน่งถูกย้ายไปยังตำแหน่งใดตำแหน่งหนึ่งซึ่งสอดคล้องกับการเคลื่อนที่ขึ้นหรือลงของห้องโดยสาร หรือการหยุด โดยการจัดแบบโค้งงอในกรณีนี้ เมื่อรถเคลื่อนที่ หน้าสัมผัสของสวิตช์บนชั้นที่ผ่านไปจะถูกเปิดไปที่ตำแหน่งสิ้นสุดตำแหน่งใดตำแหน่งหนึ่ง เพื่อเตรียมพร้อมสำหรับการดำเนินการของสายเรียกเข้าและคำสั่ง และเมื่อรถหยุด สวิตช์จะเป็น ย้ายไปที่ตำแหน่งตรงกลาง ปิดวงจรควบคุมจากคอนแทคควบคุมทิศทาง และทำให้รถไม่ออกจากพื้นเมื่อกดปุ่มสั่งการหรือโทรผิด
เพื่อให้แน่ใจว่าการเบรกของรถลิฟต์มีความแม่นยำค่อนข้างแม่นยำ เมื่อเร็ว ๆ นี้ เซ็นเซอร์ควบคุมด้วยแม่เหล็ก (กก) แบบเหนี่ยวนำหรือปิดผนึกแบบไม่สัมผัสหรือแบบสัมผัสปิดสนิทเริ่มถูกนำมาใช้ในวงจรควบคุม เซ็นเซอร์เหล่านี้ติดตั้งทั้งในเหมืองและในห้องโดยสาร: ในเหมืองมีเซ็นเซอร์สำหรับการเลือก (การชะลอตัว) และในห้องโดยสารมีเซ็นเซอร์สำหรับการหยุดที่แม่นยำ ในการเชื่อมต่อกับเซ็นเซอร์ จะมีการติดตั้งสตัดท์แม่เหล็กแบบเลือกลำแสงไว้ในห้องนักบิน และสตัดหยุดที่มีความแม่นยำแบบแม่เหล็กเฟอร์โรแมกเนติกจะถูกวางไว้ในเพลา (ในแต่ละชั้น)
เซนเซอร์แบบเหนี่ยวนำประกอบด้วยวงจรแม่เหล็กรูปตัว U แบบเปิดที่มีขดลวดอยู่ในตัวเรือน ขดลวดของรีเลย์ผู้บริหารเชื่อมต่อแบบอนุกรมและใช้แรงดันไฟฟ้ากระแสสลับ (U) กับพวกมัน
ด้วยวงจรแม่เหล็กแบบเปิด ฟลักซ์แม่เหล็กที่ข้ามขดลวดมีขนาดเล็ก ดังนั้น emf และกระแสเหนี่ยวนำตัวเองในสายคอยล์รวมถึงความต้านทานอุปนัย (X) ที่เกิดจากกระแสนั้นไม่มีอยู่จริง ดังนั้นความต้านทานของขดลวดจึงทำงาน (R) กระแสในขดลวดที่ต่อแบบอนุกรมมีขนาดค่อนข้างใหญ่ เลียนแบบการปิดหน้าสัมผัสในระบบหน้าสัมผัส (รีเลย์เปิด)
เมื่อการแบ่งปิดวงจรแม่เหล็กรูปตัวยู ฟลักซ์แม่เหล็กที่ข้ามขดลวดจะเพิ่มขึ้น และด้วยเหตุนี้แรงเคลื่อนไฟฟ้าจึงเพิ่มขึ้น การเหนี่ยวนำตัวเองเช่นเดียวกับความต้านทานการเหนี่ยวนำของขดลวดเนื่องจากมัน เป็นผลให้กระแสในขดลวดที่เชื่อมต่อเป็นอนุกรมลดลง จำลองการเปิดวงจรในระบบสัมผัส (ปิดรีเลย์ผู้บริหาร)
สวิตช์กกเป็นตัวเครื่องรูปตัว U ที่ด้านหนึ่งของร่องมีขวดแก้วปิดผนึกสองขวดที่มีสุญญากาศอยู่ภายใน และหน้าสัมผัสจับจ้องอยู่ที่แผ่นสปริงซึ่งเชื่อมต่อกับวงจรควบคุมลิฟต์ตามลำดับ อีกด้านหนึ่งของช่องเป็นแม่เหล็กถาวร องค์ประกอบการทำงานของเซ็นเซอร์ดังกล่าวคือตัวแบ่งแม่เหล็กไฟฟ้าที่ผ่านการตัดรูปตัวยูเมื่อรถลิฟต์เคลื่อนที่
หลักการทำงานของเซ็นเซอร์เหล่านี้มีดังต่อไปนี้: แรงสปริงของแผ่นสัมผัสของสวิตช์กกจะถูกควบคุมเพื่อที่ว่าหากสนามแม่เหล็กถาวรไม่กระทำกับพวกมัน หน้าสัมผัสที่เปิดตามปกติจะเปิดขึ้น และตามปกติ ผู้ติดต่อที่ปิดถูกปิดเช่น วงจรที่เชื่อมต่อหน้าสัมผัสเหล่านี้จะเปิดหรือปิด
เงื่อนไขของสวิตช์กกนี้จะเกิดขึ้นเมื่อ ferromagnetic shunt อยู่ในร่องของตัวเครื่องรูปตัว U เนื่องจากเส้นสนามแม่เหล็กของแม่เหล็กถาวรถูกปิดทั่วทั้ง shunt เมื่อ shunt ออกจากร่อง เส้นสนามแม่เหล็กจะปิดตามขวาง แผ่นซึ่งเอาชนะการกระทำของสปริงและหน้าสัมผัสสวิตช์กกและดังนั้นวงจรที่เชื่อมต่อจึงเข้าสู่สถานะตรงกันข้าม

จากตัวอย่างที่สะท้อนถึงคุณสมบัติหลักของรูปแบบการควบคุมลิฟต์ ให้พิจารณารูปแบบการควบคุมสำหรับลิฟต์ตัวเดียวโดยไม่มีการหยุดที่เกี่ยวข้องดังแสดงในรูปที่ 1. ลิฟต์ให้บริการสี่ชั้น มอเตอร์แบบอะซิงโครนัสความเร็วสองระดับ M ใช้เป็นมอเตอร์สำหรับผู้บริหาร
การรวมรอบการหมุนของมอเตอร์ต่ำ (Ml) หรือสูง (B) นั้นดำเนินการโดยคอนแทคเตอร์ Ml และ B ที่สอดคล้องกัน ทิศทางการหมุนของมอเตอร์ถูกกำหนดโดยคอนแทค B และ H การชะลอตัว - โดยตัวต้านทานเพิ่มเติม P การหยุด - โดยเบรกแม่เหล็กไฟฟ้า ET.
ใช้เป็นสวิตช์ตั้งพื้น เซ็นเซอร์อุปนัยแบบไม่สัมผัส (DTS, DTOV และ DTON) ต่ออนุกรมกับคอยล์รีเลย์ (RIS, RITOV, RITON) เซ็นเซอร์ TTP ใช้เพื่อเปิดการขับเคลื่อนลิฟต์ให้มีความเร็วสูงและกระตุ้นการชะลอตัว ในขณะที่เซ็นเซอร์ DTOV และ DTON ได้รับการออกแบบมาให้หยุดลิฟต์อย่างแม่นยำที่ระดับพื้นของชั้นที่เกี่ยวข้องและวางไว้บนรถ มีการติดตั้งตัวแบ่งแม่เหล็กสำหรับพวกเขาในเพลาของเพลา
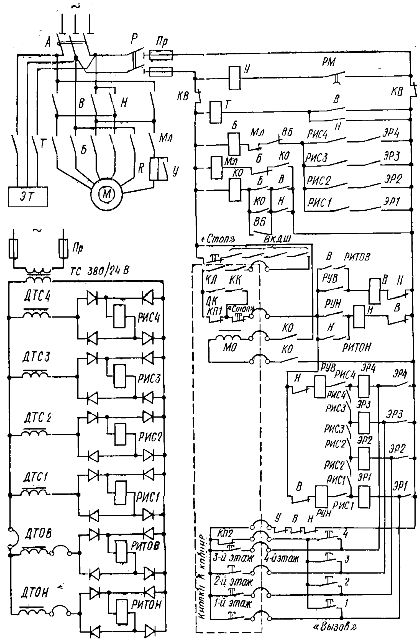
ข้าว. 1. แผนผังของการควบคุมลิฟต์ตัวเดียว
ให้เราพิจารณาวัตถุประสงค์ขององค์ประกอบที่เหลือของวงจรและการทำงานของมันโดยใช้ตัวอย่างการย้ายห้องโดยสารพร้อมผู้โดยสารจากชั้น 1 ถึงชั้น 3 โดยสมมติว่าเครื่องอัตโนมัติ A, ตัวตัดการเชื่อมต่อ P และลิมิตสวิตช์ KB ที่จำกัด การเลื่อนห้องโดยสารขึ้นและลงในโหมดฉุกเฉินจะปิดลงและห้องโดยสารอยู่ที่ชั้นล่าง ในกรณีนี้ขดลวดของรีเลย์ RIS นอกเหนือจากรีเลย์ของชั้นแรกจะไหลจากกระแสที่กำหนด
เมื่อกดปุ่ม «ชั้น 3» วงจรไฟฟ้าต่อไปนี้จะเกิดขึ้น: เฟสเครือข่าย — ขั้วของตัวตัดการเชื่อมต่อ P — ฟิวส์ Pr — ลิมิตสวิตช์ KB — ปุ่ม «หยุด» — การล็อคประตูเหมือง D1 — D4 — หน้าสัมผัสสำหรับปรับความตึง เชือก KK — สวิตช์จำกัดความปลอดภัย KL — สวิตช์ประตูห้องโดยสาร DK — หน้าสัมผัสของปุ่ม «หยุด” — หน้าสัมผัสบล็อกเปิด - หน้าสัมผัส Н — คอยล์รีเลย์ RUV — หน้าสัมผัสปิดของรีเลย์ RIS4 และ RISZ (ขดลวดของรีเลย์เหล่านี้ส่งกระแสไฟ) — คอยล์ ของรีเลย์ชั้น ERZ — ปุ่ม «ชั้น 3» — ช่องเปิด — หน้าสัมผัสของคอนแทค U, B, N — ลิมิตสวิตช์ KB — ฟิวส์ R — เสาปลด P — เฟสเครือข่าย
หลังจากรีเลย์ RUV และ ER3 ทำงานแล้ว คอนแทคเคลื่อนที่ไปข้างหน้า B คอนแทคเคลื่อนที่เร็ว B (บนวงจรคอยล์ B — หน้าสัมผัสบล็อก ML — สวิตช์ความเร็วสูง VB — หน้าสัมผัสรีเลย์ RISZ และ ER3) จะเปิดอยู่ เมื่อปิดหน้าสัมผัส B และ B มอเตอร์จะเชื่อมต่อกับแหล่งจ่ายไฟหลัก คอนแทค T รอกปลดและคอนแทค KO ปัดซึ่งเปิดโซลินอยด์ปัด MO และเตรียมวงจรของขดลวดคอนแทคความเร็วต่ำ Ml คือ เปิด. จังหวะการถอยกลับ ปลดคันล็อค และห้องโดยสารเริ่มเคลื่อนที่
เมื่อห้องโดยสารเข้าใกล้ชั้นสาม ระบบปัดแม่เหล็กไฟฟ้าจะปิดคอยล์ของเซ็นเซอร์ TTSZ ความต้านทานจะเพิ่มขึ้น และรีเลย์ RISZ จะหายไป เป็นการปิดรีเลย์ ER3 และ RUV เป็นผลให้คอนแทค B หายไปปิดหน้าสัมผัสเปิด Ml คอนแทคความเร็วต่ำและคอนแทค B ยังคงเปิดอยู่เนื่องจากเมื่อรถเคลื่อนที่วงจรแม่เหล็กของเซ็นเซอร์เบรกที่แม่นยำยังไม่ปิดดังนั้น ผู้ติดต่อ RITOV ยังไม่เปิดมอเตอร์หยุดทำงานด้วยความเร็วต่ำในโหมดเครื่องกำเนิดไฟฟ้าโดยมีตัวต้านทาน R. อยู่ในเฟสหนึ่งของสเตเตอร์
ทันทีที่พื้นของรถอยู่ในแนวเดียวกับพื้น Magnetic shunt จะปิดวงจรแม่เหล็กของขดลวดของเซ็นเซอร์หยุด DTOV ที่แน่นอน รีเลย์ RITOV จะหายไปและคอนแทคเตอร์ B จากนั้น KO และในที่สุด ML จะหัน ดับ เป็นผลให้แม่เหล็กไฟฟ้าของมอเตอร์และเบรกถูกตัดการเชื่อมต่อจากแหล่งจ่ายไฟหลัก ใช้เบรกกล และห้องโดยสารจะหยุดทำงาน
เพื่อเรียนรู้รูปแบบโดยรวมสำหรับการควบคุมลิฟต์ที่มีการหยุดผ่านเฉพาะเมื่อลดระดับรถลงหรือรูปแบบโดยรวมทั้งหมด เช่น เมื่อผ่านจุดหยุดในขณะที่รถกำลังเคลื่อนที่ขึ้นและลง จำเป็นต้องมีรูปแบบคล้ายกับที่กล่าวไว้ในรูปที่ 1 แนะนำเพิ่มเติมบางอย่าง ตัวอย่างเช่น ในวงจรมอเตอร์ความเร็วสองระดับ เซ็นเซอร์อุปนัย ID รีเลย์ RIS และปุ่มโทรออกและสั่งงานในแต่ละชั้นจะรวมอยู่ด้วยดังแสดงในรูปที่ 2.
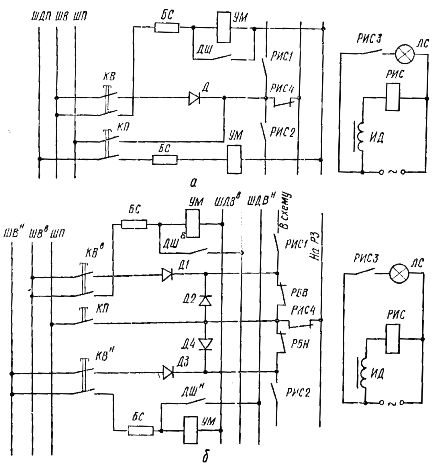
ข้าว. 2. ส่วนเพิ่มเติมของแผนควบคุมลิฟต์ส่วนรวม (ชั้นเดียว)
ในรูปแบบที่มีการหยุดผ่านเมื่อลดระดับห้องโดยสาร (รูปที่ 2, a) การโทรและคำสั่งจะได้รับจากปุ่มปักหมุดแยกต่างหาก ดังนั้นจึงสามารถลงทะเบียนได้ตลอดเวลาและส่งไปยังโครงร่างทันทียกเว้นช่วงการเคลื่อนไหวของ ห้องโดยสารพร้อมผู้โดยสารขึ้นเมื่อบัสจ่ายของสายเชื่อมต่อการโอนสายไปยังวงจรผู้บริหารถูกปิดโดยผู้ติดต่อที่เลือกจากบัสบวก
ในรูปแบบการควบคุมแบบเลือกสมบูรณ์ (รูปที่ 2, b) มีวงจรเสียงเรียกเข้าเพิ่มเติมสำหรับการขึ้นเครื่อง (ШДВв) และการลดระดับ (ШДВн) ห้องโดยสารหน้าสัมผัสของรีเลย์บล็อก RBV และ RBN เชื่อมต่อกับหน้าสัมผัสของวงจรผู้บริหารวงจรส่วนเลือก .
ในไดอะแกรมที่แสดงในรูป 1 และ 2 ในกรณีที่ไม่มีห้องโดยสารอยู่บนพื้น ขดลวดของเซ็นเซอร์เหนี่ยวนำ ID และรีเลย์ RIS จะได้รับพลังงาน ดังนั้นเมื่อคุณกดปุ่มคำสั่งคำสั่งหรือเรียก KV (พวกมันจะถูกยึดไว้ในสถานะเปิดโดยแม่เหล็กยึด UM จนกว่าจะถูกสัมผัสของประตูเหมืองบนพื้นนี้ของ DSh) วงจรจะเกิดขึ้น (ไม่ใช่ แสดงในรูป) ซึ่งรวมถึง RUV รีเลย์ควบคุมขึ้น หากชั้นปลายทางสูงกว่าพื้นที่จอดรถ หรือรีเลย์ควบคุมลง LVL หากชั้นปลายทางอยู่ต่ำกว่าที่จอดรถ
หลังจากการมาถึงของรถที่พื้นเรียก ID ของเซ็นเซอร์อุปนัยจะถูกระบายออก รีเลย์ RIS จะปิด เปิดหน้าสัมผัสซึ่งจะปิดรีเลย์ RUV หรือ RUN และหลอดไฟ LS (รถหยุด) และ เมื่อปิดหน้าสัมผัส RIS4 วงจรจะถูกเตรียมไว้สำหรับการดำเนินการตามคำสั่งที่มาจากรถ
ในวงจรรวมที่สมบูรณ์วงจรที่แบ่งโดยหน้าสัมผัส RIS1 และ RIS2 ที่พื้นลานจอดรถของรถนั้นไม่เพียงถูกทำลายโดยหน้าสัมผัสเหล่านี้เท่านั้น แต่ยังรวมถึงหน้าสัมผัสของรีเลย์บล็อกขึ้น RBV หรือลง RBN (ขดลวดของพวกมัน ไม่แสดงในแผนภาพ) และวงจรเพิ่ม ลด และสั่งแยกออกจากกันโดยแยกไดโอด D1 — D4
ก่อนกดปุ่มโทรออกหรือสั่งการ หากยังไม่ได้เลือกทิศทางการเดินทางของรถ หน้าสัมผัสทั้งหมดในวงจรเลือกทิศทางจะปิด ยกเว้นหน้าสัมผัส RIS4 ที่ชั้นจอดรถดังนั้น เมื่อกดปุ่มใดปุ่มหนึ่งเหล่านี้ สัญญาณเรียกจากชั้นที่อยู่เหนือพื้นที่จอดรถจะเชื่อมต่อกับรีเลย์คอยล์ RUN และสัญญาณเรียกจากชั้นด้านล่างที่จอดรถจะรวมรีเลย์ RUV หลังจากเลือกทิศทางแล้ว พร้อมกันกับรีเลย์ RUV หรือ LVL หนึ่งในรีเลย์บล็อกทิศทางตรงข้าม RBV หรือ RBN จะเปิดขึ้น ซึ่งจะขัดจังหวะเอาต์พุตผ่านวงจรส่วนของสัญญาณการโทรที่ไม่ชั่วคราวด้วยหน้าสัมผัส
ในรูปแบบที่แสดงในรูปที่ 2, a, เพื่อลดผู้โดยสาร, ห้องโดยสารไปโดยไม่หยุดที่ชั้นสูงสุดของการสนทนาและจากนั้นก็ลงมาโดยหยุดผ่าน, และในแผนภาพที่แสดงในรูปที่. 2, b, หากจำเป็นต้องรับผู้โดยสาร, ห้องโดยสารจะไปที่ชั้นต่ำสุดของการโทร, จากนั้นขึ้นโดยหยุดผ่าน.
ในโครงร่างที่พิจารณาตัวเลือกจะทำกับองค์ประกอบรีเลย์ นอกจากนี้ยังใช้ตัวเลือกอื่นๆ เช่น ลูกเบี้ยว, โฟโตอิเล็กทริก, การติดตามแปรงต่อเนื่อง, การก้าว, บนองค์ประกอบคงที่ ฯลฯ
ด้วยจำนวนผู้โดยสารจำนวนมาก ลิฟต์หลายตัวจึงถูกติดตั้งในทางเดินเดียว ซึ่งรวมการควบคุมเป็นคู่หรือเป็นกลุ่มเพื่อเพิ่มความสะดวกสบายและเพิ่มพลัง จำนวนลิฟต์ที่เชื่อมต่อกันเป็นกลุ่มมักจะไม่เกินสี่ตัว แต่มักจะมากกว่าสามตัว แม้ว่าระบบจะทราบกันว่ามีลิฟต์มากถึงแปดตัวในกลุ่มก็ตาม
ในการควบคุมกลุ่ม มักจะมีสามโหมดหลักของการทำงานของลิฟต์: การขึ้นสูงสุด การลงสูงสุด และการเคลื่อนไหวที่สมดุลในทั้งสองทิศทาง การเปิดใช้งานลิฟต์สำหรับโหมดหนึ่งหรือโหมดอื่นนั้นดำเนินการโดยผู้มอบหมายงานหรือโดยอัตโนมัติโดยใช้นาฬิกาตั้งโปรแกรมที่ติดตั้งไว้สำหรับลิฟต์แต่ละกลุ่ม
ในอาคารสูงลิฟต์แต่ละกลุ่มได้รับการแก้ไขเพื่อให้บริการในบางพื้นที่ชั้นอื่น ๆ ไม่ได้ให้บริการ หากมีลิฟต์หลายตัวในกลุ่มที่ให้บริการพื้นที่เดียวหรืออาคารเตี้ย เพื่อเพิ่มความเร็วเฉลี่ยในการเคลื่อนที่โดยการลดจำนวนการหยุด ลิฟต์แยกต่างหากสามารถจัดสรรให้บริการในชั้นคู่และชั้นคี่ได้
เพื่อให้มีผลในการควบคุมลิฟต์แบบคู่หรือแบบกลุ่ม วงจรควบคุมของลิฟต์จะต้องเป็นแบบรวม และการเรียกไปยังแต่ละชั้นในทั้งสองทิศทางจะต้องลงทะเบียนแยกกันในแต่ละทิศทางโดยอุปกรณ์จัดเก็บที่เหมาะสมที่มีรีเลย์ ทรานซิสเตอร์ ฯลฯ
จากตัวอย่างที่สะท้อนถึงการทำงานเฉพาะในการควบคุมลิฟต์ที่จับคู่กับรีเลย์จอดรถเพิ่มเติมของลิฟต์ตัวแรก 1PC และลิฟต์ตัวที่สอง 2PC ให้พิจารณาส่วนของแผนผังไดอะแกรมที่แสดงในรูปที่ 3.
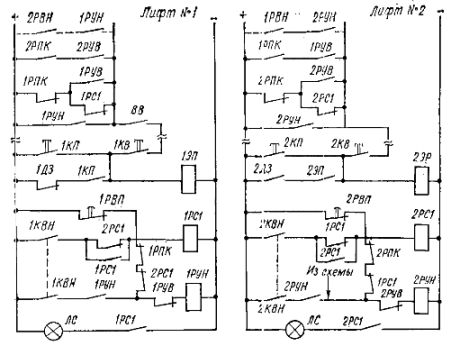
ข้าว. 3. ส่วนของแผนผังของการควบคุมลิฟต์คู่: ER — รีเลย์ตั้งพื้น, RPK — รีเลย์เปลี่ยนช่องสัญญาณ, รีเลย์สตาร์ทอัตโนมัติ RVP
กรณีนี้รถที่ลงมาพร้อมผู้โดยสารชั้น 1 ไม่รับสายจากชั้นอื่นและรอผู้โดยสารอยู่ หากไม่มีรถอยู่ที่ชั้นหนึ่ง รถที่ขึ้นตามคำสั่งและถูกปล่อยจะถูกส่งไปที่ชั้นหนึ่งโดยอัตโนมัติ และเมื่อรถคันอื่นลดระดับหรือจอดอยู่ คันสุดท้ายจะยังคงอยู่บนพื้นเมื่อสิ้นสุดการบิน หรือไปที่ศูนย์โหลดและใช้สำหรับการโทรเป็นหลักในทิศทางการจม
รีเลย์ที่จอดรถในห้องโดยสารชั้นแรก 1PC1 หรือ 2PC1 เปิดอยู่หลังจากการมาถึงห้องโดยสารชั้นหนึ่งจากสวิตช์จำกัด 1KVN หรือ 2KVN (ติดตั้งในเหมืองเครื่องถ่ายเอกสาร) รีเลย์เหล่านี้ถูกบล็อกดังนั้นการรวมหนึ่งในนั้นบ่งชี้ว่ารถคันนี้มาถึงชั้นหนึ่งเร็วกว่ารถคันอื่น ในกรณีนี้ รีเลย์ 1PC1 หรือ 2PC1 ที่มีหน้าสัมผัสปิดจะเปิดไฟสัญญาณ LS และเมื่อหน้าสัมผัสเปิดหยุดวงจรเสียงเรียกเข้าของลิฟต์ ขัดจังหวะการโทรขณะที่รถจอดอยู่ที่ชั้นหนึ่ง
เมื่อรถออกจากชั้นหนึ่ง สัญญาณไฟ LS จะดับลง ไฟฟ้าที่เรียกวงจรของลิฟต์นี้จะกลับมาทันทีหลังจากปล่อยรถ และหลังจากที่รถของลิฟต์อีกตัวมาถึงชั้นหนึ่ง รีเลย์คอมพิวเตอร์ของรถจะ เปิด. ห้องโดยสารนี้ยังคงอยู่ที่ชั้นล่างและรอผู้โดยสาร (ซึ่งส่งสัญญาณโดยการเปิดไฟเตือน LS) เมื่อปล่อยรถที่เพิ่มขึ้นตามคำสั่งและไม่มีการโทรสัญญาณจะถูกส่งไปยังวงจรที่เปิดคอยล์รีเลย์ 1RUN หรือ 2RUV 1RUN หรือ 2RUV ผ่านหน้าสัมผัสเปิดของลิมิตสวิตช์ 1KVN หรือ 2KVN และรถ ไปที่ชั้นหนึ่งและ t .n.
อุปกรณ์ควบคุมมอเตอร์ของลิฟต์แบบควบคุมเดี่ยว ลิฟต์คู่ และลิฟต์แบบกลุ่มมักจะติดตั้งอยู่บนแผง สถานี หรือชุดควบคุมทั่วไปที่ติดตั้งในห้องเครื่องจักร