การควบคุมความถี่ของมอเตอร์แบบอะซิงโครนัส
ปัจจุบันมีการใช้กันอย่างแพร่หลายในการควบคุมความถี่ของความเร็วเชิงมุมของการหมุนของไดรฟ์ไฟฟ้าด้วยมอเตอร์แบบอะซิงโครนัสเนื่องจากช่วยให้ในช่วงกว้างสามารถเปลี่ยนความเร็วในการหมุนของโรเตอร์ได้อย่างราบรื่นทั้งด้านบนและด้านล่างของค่าเล็กน้อย
ตัวแปลงความถี่เป็นอุปกรณ์ไฮเทคสมัยใหม่ที่มีช่วงการปรับที่กว้างซึ่งมีชุดฟังก์ชันมากมายสำหรับควบคุมมอเตอร์แบบอะซิงโครนัส คุณภาพและความน่าเชื่อถือสูงสุดทำให้สามารถใช้ในอุตสาหกรรมต่างๆ เพื่อควบคุมการขับเคลื่อนของปั๊ม พัดลม สายพานลำเลียง ฯลฯ

ตัวแปลงความถี่สำหรับแรงดันไฟฟ้าแบ่งออกเป็นเฟสเดียวและสามเฟส แต่โดยการออกแบบเป็นเครื่องไฟฟ้าแบบหมุนและไฟฟ้าสถิต ในตัวแปลงเครื่องจักรไฟฟ้า ความถี่ผันแปรได้มาจากการใช้เครื่องจักรไฟฟ้าแบบธรรมดาหรือแบบพิเศษ วี ตัวแปลงความถี่คงที่ การเปลี่ยนแปลงความถี่ของกระแสไฟฟ้าทำได้โดยการใช้องค์ประกอบไฟฟ้าที่ไม่มีการเคลื่อนไหว
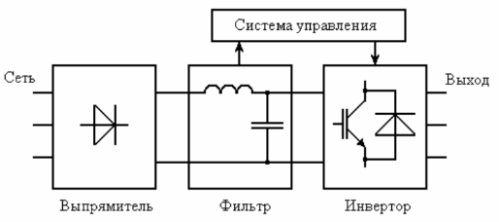
วงจรแปลงความถี่ของมอเตอร์เหนี่ยวนำ
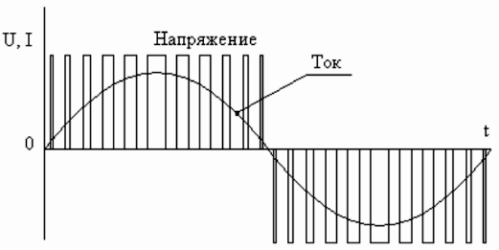
สัญญาณเอาต์พุตของตัวแปลงความถี่
ตัวแปลงความถี่สำหรับเมนเฟสเดียวสามารถให้ไดรฟ์ไฟฟ้าสำหรับอุปกรณ์การผลิตที่มีกำลังสูงถึง 7.5 กิโลวัตต์ คุณลักษณะของการออกแบบตัวแปลงเฟสเดียวที่ทันสมัยคือที่อินพุตมีหนึ่งเฟสที่มีแรงดัน 220V และที่เอาต์พุตมีสามเฟสที่มีค่าแรงดันเท่ากันซึ่งช่วยให้สามารถเชื่อมต่อมอเตอร์ไฟฟ้าสามเฟสเข้ากับ a อุปกรณ์โดยไม่ต้องใช้คาปาซิเตอร์
ตัวแปลงความถี่ที่ขับเคลื่อนโดยเครือข่ายสามเฟส 380V มีจำหน่ายในช่วงกำลังตั้งแต่ 0.75 ถึง 630 กิโลวัตต์ ขึ้นอยู่กับค่ากำลังไฟ อุปกรณ์ต่างๆ ผลิตขึ้นในกล่องโพลีเมอร์ผสมและกล่องโลหะ
กลยุทธ์การควบคุมที่ได้รับความนิยมมากที่สุดสำหรับมอเตอร์เหนี่ยวนำคือการควบคุมแบบเวกเตอร์ ปัจจุบัน ตัวแปลงความถี่ส่วนใหญ่ใช้การควบคุมเวกเตอร์หรือแม้แต่การควบคุมเวกเตอร์แบบไร้เซ็นเซอร์ (แนวโน้มนี้พบได้ในตัวแปลงความถี่ที่ใช้การควบคุมแบบสเกลาร์แต่เดิมและไม่มีขั้วต่อสำหรับเชื่อมต่อเซ็นเซอร์ความเร็ว)
ขึ้นอยู่กับประเภทของโหลดเอาต์พุต ตัวแปลงความถี่จะถูกแบ่งย่อยตามประเภทของการใช้งาน:
-
สำหรับไดรฟ์ปั๊มและพัดลม
-
สำหรับการขับเคลื่อนด้วยไฟฟ้าในอุตสาหกรรมทั่วไป
-
ทำงานเป็นส่วนหนึ่งของมอเตอร์ไฟฟ้าที่ทำงานด้วยโอเวอร์โหลด

ลักษณะทางกลของโหลดทั่วไป
ตัวแปลงความถี่สมัยใหม่มีลักษณะการทำงานที่หลากหลายเช่นมีการควบคุมความเร็วและทิศทางการหมุนของมอเตอร์ด้วยตนเองและโดยอัตโนมัติเช่นเดียวกับ โพเทนชิออมิเตอร์ในตัว บนแผงควบคุมมีความสามารถในการปรับช่วงความถี่เอาต์พุตตั้งแต่ 0 ถึง 800 Hz
คอนเวอร์เตอร์สามารถควบคุมมอเตอร์แบบอะซิงโครนัสโดยอัตโนมัติตามสัญญาณจากเซ็นเซอร์ต่อพ่วง และขับไดรฟ์ไฟฟ้าตามอัลกอริธึมจังหวะที่กำหนด รองรับฟังก์ชั่นการกู้คืนอัตโนมัติในกรณีไฟดับในระยะสั้น ทำการควบคุมชั่วคราวจากคอนโซลระยะไกลและป้องกันมอเตอร์ไฟฟ้าจากการโอเวอร์โหลด

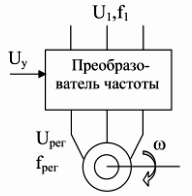
ความสัมพันธ์ระหว่างความเร็วเชิงมุมของการหมุนกับความถี่ของกระแสจ่ายเป็นไปตามสมการ
ωo = 2πe1/ หน้า
ด้วยแรงดันไฟฟ้าคงที่ U1 และความถี่ที่เปลี่ยนแปลง ฟลักซ์แม่เหล็กของมอเตอร์เหนี่ยวนำจะเปลี่ยนไป ในเวลาเดียวกัน เพื่อการใช้งานที่ดีขึ้นของระบบแม่เหล็ก โดยการลดความถี่ของแหล่งจ่ายไฟ จำเป็นต้องลดแรงดันไฟฟ้าตามสัดส่วน มิฉะนั้น กระแสแม่เหล็กและการสูญเสียในเหล็กจะเพิ่มขึ้นอย่างมาก
ในทำนองเดียวกัน เมื่อความถี่การจ่ายเพิ่มขึ้น แรงดันไฟฟ้าจะต้องเพิ่มขึ้นตามสัดส่วนเพื่อรักษาฟลักซ์แม่เหล็กให้คงที่ เพราะไม่เช่นนั้น (ด้วยแรงบิดของเพลาคงที่) สิ่งนี้จะทำให้กระแสของโรเตอร์เพิ่มขึ้น ทำให้กระแสเกินพิกัดของขดลวด และลดแรงบิดสูงสุด
กฎการควบคุมแรงดันไฟฟ้าแบบมีเหตุผลขึ้นอยู่กับลักษณะของโมเมนต์ความต้านทาน
ในช่วงเวลาคงที่ของโหลดคงที่ (Ms = const) แรงดันไฟฟ้าจะต้องได้รับการควบคุมตามสัดส่วนของความถี่ U1 / f1 = const สำหรับลักษณะของโหลดพัดลม อัตราส่วนจะใช้รูปแบบ U1 / f21 = const
ด้วยแรงบิดโหลดแปรผกผันกับความเร็ว U1 /√f1 = const.
รูปด้านล่างแสดงแผนภาพการเชื่อมต่ออย่างง่ายและลักษณะทางกลของมอเตอร์เหนี่ยวนำที่มีการควบคุมความถี่ของความเร็วเชิงมุม
แผนภาพการเชื่อมต่อของตัวแปลงความถี่กับมอเตอร์แบบอะซิงโครนัส
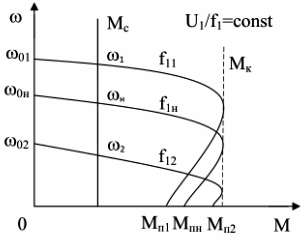
ลักษณะเฉพาะของโหลดที่มีโมเมนต์ต้านทานคงที่คงที่
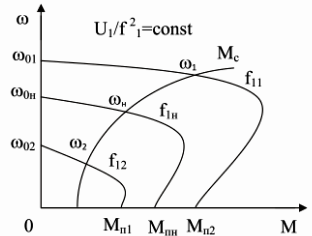
NSFeatures สำหรับชาร์จพัดลม
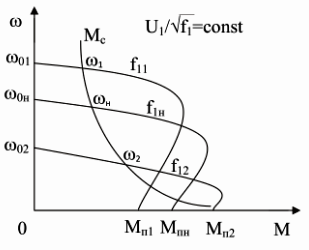
ลักษณะเฉพาะภายใต้แรงบิดโหลดคงที่แปรผกผันกับความเร็วเชิงมุมของการหมุน
การควบคุมความถี่ของความเร็วของมอเตอร์แบบอะซิงโครนัสช่วยให้คุณเปลี่ยนความเร็วเชิงมุมของการหมุนในช่วง — 20 … 30 ถึง 1 การควบคุมความเร็วของมอเตอร์แบบอะซิงโครนัสลงจากมอเตอร์หลักนั้นทำได้จริงจนเป็นศูนย์
เมื่อความถี่ของเครือข่ายอุปทานเปลี่ยนไป ขีดจำกัดบนของความเร็วในการหมุนของมอเตอร์แบบอะซิงโครนัสจะขึ้นอยู่กับคุณสมบัติทางกลของมัน โดยเฉพาะอย่างยิ่งเนื่องจากที่ความถี่เหนือมอเตอร์แบบอะซิงโครนัสที่ระบุจะทำงานโดยมีคุณสมบัติด้านพลังงานที่ดีกว่าที่ความถี่ต่ำกว่า ดังนั้นหากใช้กระปุกเกียร์ในระบบขับเคลื่อนจะต้องดำเนินการควบคุมความถี่ของมอเตอร์นี้ไม่เพียง แต่ลงเท่านั้น แต่ยังต้องขึ้นจากจุดที่กำหนดด้วยจนถึงความเร็วสูงสุดที่อนุญาตของการหมุนภายใต้เงื่อนไขของความแข็งแรงเชิงกลของ โรเตอร์
เมื่อความเร็วของเครื่องยนต์เพิ่มขึ้นเหนือค่าที่ระบุในหนังสือเดินทาง ความถี่ของแหล่งพลังงานไม่ควรเกินค่าที่ระบุโดยไม่เกิน 1.5 - 2 เท่า
วิธีความถี่มีแนวโน้มดีที่สุดสำหรับการควบคุมมอเตอร์เหนี่ยวนำโรเตอร์กรงกระรอก การสูญเสียพลังงานด้วยการควบคุมดังกล่าวมีน้อยเนื่องจากไม่ได้เพิ่มขึ้น ลื่นไถล… ลักษณะเชิงกลที่เกิดขึ้นมีความแข็งแกร่งสูง