การเลือกใช้มอเตอร์สำหรับลิฟต์และเครื่องยกตามกำลัง
 ลิฟต์โดยสารและลิฟต์บรรทุกสินค้าที่ทันสมัยของอาคารที่พักอาศัยและอาคารบริหาร ตลอดจนเครื่องจักรบางประเภทสำหรับการยกทุ่นระเบิด ดำเนินการโดยใช้น้ำหนักถ่วงหรือที่บางครั้งเรียกว่าถ่วงน้ำหนัก ในเครื่องจักรทำเหมือง การปรับสมดุลตามที่ระบุไว้แล้ว มักไม่ได้ทำโดยใช้น้ำหนักถ่วง แต่ใช้ภาชนะยกที่สอง
ลิฟต์โดยสารและลิฟต์บรรทุกสินค้าที่ทันสมัยของอาคารที่พักอาศัยและอาคารบริหาร ตลอดจนเครื่องจักรบางประเภทสำหรับการยกทุ่นระเบิด ดำเนินการโดยใช้น้ำหนักถ่วงหรือที่บางครั้งเรียกว่าถ่วงน้ำหนัก ในเครื่องจักรทำเหมือง การปรับสมดุลตามที่ระบุไว้แล้ว มักไม่ได้ทำโดยใช้น้ำหนักถ่วง แต่ใช้ภาชนะยกที่สอง
น้ำหนักถ่วงสำหรับลิฟต์ถูกเลือกเพื่อให้น้ำหนักของภาชนะยก (รถ) สมดุลกับน้ำหนักบรรทุกเล็กน้อยที่จะยก:

โดยที่ GH คือน้ำหนักของภาระการยกที่กำหนด, N; G0 — น้ำหนักห้องโดยสาร, N; Gnp คือน้ำหนักของตุ้มน้ำหนัก, N; α เป็นปัจจัยสมดุล โดยปกติจะเท่ากับ 0.4-0.6
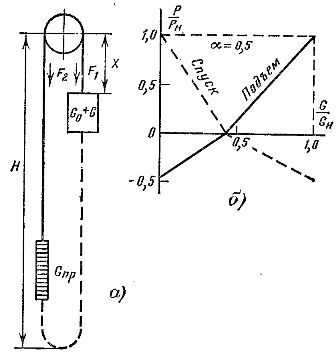
ข้าว. 1. เพื่อคำนวณโหลดบนเพลามอเตอร์ลิฟต์
ความจำเป็นในการปรับสมดุลของเรือหนักนั้นชัดเจน เนื่องจากในการเคลื่อนย้ายเรือโดยไม่มีน้ำหนักถ่วง จำเป็นต้องมีการเพิ่มกำลังเครื่องยนต์ที่สอดคล้องกัน ความสามารถในการปรับสมดุลของน้ำหนักบรรทุกที่กำหนดจะถูกเปิดเผยเมื่อพิจารณากำลังที่เทียบเท่าสำหรับกราฟการบรรทุกที่กำหนดเป็นเรื่องง่ายที่จะปฏิบัติตาม ตัวอย่างเช่น หากลิฟต์ทำงานโดยส่วนใหญ่เพื่อเพิ่มน้ำหนักบรรทุกและลดระดับของรถเปล่า กำลังเครื่องยนต์ที่เทียบเท่าตามแผนภาพโหลดจะมีค่าต่ำสุดที่ α = 0.5
การมีตุ้มน้ำหนักถ่วงทำให้เส้นโค้งโหลดของเครื่องยนต์แบนลง ซึ่งช่วยลดความร้อนระหว่างการทำงาน อ้างถึงไดอะแกรมที่แสดงในรูปที่ 1, a แล้วตามด้วยค่าน้ำหนักของตุ้มถ่วง

และไม่มีเชือกถ่วงน้ำหนักและแรงเสียดทานของห้องโดยสารและน้ำหนักถ่วงบนไกด์ คุณสามารถเขียน:


โดยที่ gk คือน้ำหนักของเชือก 1 m, N / m
แรงดึง

แรงบิดและกำลังของเพลามอเตอร์ถูกกำหนดตามสูตรต่อไปนี้:
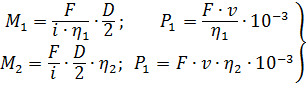
โดยที่ M1, P1 — แรงบิดและกำลังเมื่อไดรฟ์ทำงานในโหมดมอเตอร์ Nm และ kW ตามลำดับ M2, P2 — แรงบิดและกำลังเมื่อไดรฟ์ทำงานในโหมดเครื่องกำเนิดไฟฟ้า Nm และ kW ตามลำดับ η1, η2 — ประสิทธิภาพของเฟืองตัวหนอนพร้อมการถ่ายโอนพลังงานโดยตรงและย้อนกลับ
ค่าของ η1 และ η2 แบบไม่เชิงเส้นขึ้นอยู่กับความเร็วของเพลาหนอนและสามารถคำนวณได้จากสูตร
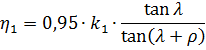

ที่นี่ λ คือมุมขึ้นของเส้นก้นหอยบนกระบอกทำดัชนีของหนอน k1 เป็นค่าสัมประสิทธิ์ที่คำนึงถึงการสูญเสียในตลับลูกปืนและอ่างน้ำมันของกระปุกเกียร์ ρ — มุมแรงเสียดทาน ขึ้นอยู่กับความเร็วของการหมุนของเพลาหนอน
จากสูตรของแรงบนมัดลากตามนั้นในกรณีที่ไม่มีเชือกสมดุลภาระในไดรฟ์ไฟฟ้าของเครื่องกว้านยกจะขึ้นอยู่กับตำแหน่งของเรือยก
เนื่องจากความสามารถในการรับน้ำหนักขนาดใหญ่ — มากถึง 10 ตัน ความเร็วในการเคลื่อนที่สูง — 10 ม./วินาที และมากกว่านั้น ความสูงในการยกสูงที่ 200-1,000 ม. และสภาพการทำงานที่รุนแรง เครื่องยกของเหมืองจึงติดตั้งเชือกเหล็กที่มีมวลมาก ตัวอย่างเช่น ลองนึกภาพว่าพาสหนึ่งลดระดับลงไปที่ขอบฟ้าล่าง ในขณะที่อีกพาสหนึ่งอยู่ด้านบน และในขณะนั้นมันจะถูกยกเลิกการโหลด ในตำแหน่งนี้ เชือกส่วนหัวทั้งหมดจะไม่สมดุลกัน และที่จุดเริ่มต้นของการขึ้น มอเตอร์จะต้องเอาชนะโมเมนต์คงที่ซึ่งเกิดจากน้ำหนักของน้ำหนักบรรทุกและเชือก การทรงตัวของเชือกจะเกิดขึ้นที่กึ่งกลางของทางเดินข้าม จากนั้นจะขาดอีกครั้งและน้ำหนักของเชือกส่วนที่ลงมาจะช่วยปลดเครื่องยนต์
การโหลดที่ไม่สม่ำเสมอโดยเฉพาะอย่างยิ่งในเหมืองลึกทำให้ต้องประเมินกำลังเครื่องยนต์สูงเกินไป ดังนั้น ที่ความสูงในการยกมากกว่า 200-300 ม. ขอแนะนำให้ปรับสมดุลของเชือกยกศีรษะด้วยความช่วยเหลือของเชือกหางที่แขวนไว้ ของเรือยก โดยปกติแล้วเชือกหางจะถูกเลือกโดยมีส่วนตัดขวางและความยาวเท่ากันกับเชือกหลักซึ่งเป็นผลมาจากการที่ระบบยกมีความสมดุล
เนื่องจากโหลดมีการเปลี่ยนแปลงระหว่างการทำงานของลิฟต์และเครื่องยก เพื่อที่จะกำหนดกำลังหรือโมเมนต์ของเพลามอเตอร์สำหรับแต่ละโหลด จึงสะดวกที่จะสร้างกราฟของการพึ่งพาค่าเหล่านี้บนโหลด ในหลายจุดซึ่งมีลักษณะใกล้เคียงกันดังรูป 1b แล้วใช้ในการสร้างไดอะแกรมโหลด
ในกรณีนี้ ต้องทราบโหมดการทำงานของไดรฟ์ไฟฟ้าของเครื่องยก ซึ่งส่วนใหญ่จะพิจารณาจากระยะเวลาสัมพัทธ์ของการเปิดใช้งาน PV และจำนวนการเริ่มต้นต่อชั่วโมงของมอเตอร์ ตัวอย่างเช่น สำหรับลิฟต์ โหมดการทำงานของไดรฟ์ไฟฟ้าจะพิจารณาจากสถานที่ติดตั้งและวัตถุประสงค์ของลิฟต์
ในอาคารที่อยู่อาศัย ตารางการจราจรค่อนข้างสม่ำเสมอ และระยะเวลาสัมพัทธ์ — PV และความถี่ในการสตาร์ทมอเตอร์ h เท่ากับ 40% และ 90-120 สตาร์ทต่อชั่วโมง ตามลำดับ ในอาคารสำนักงานสูง ปริมาณลิฟต์เพิ่มขึ้นอย่างรวดเร็วในช่วงเวลาที่พนักงานมาถึงและออกจากที่ทำงาน ดังนั้นในช่วงพักกลางวัน ค่าที่สูงจะมี PV และ h-40-60% และ 150 -200 เริ่มต้นต่อชั่วโมง
หลังจากวาดเสร็จแล้ว โหลดคงที่บนเพลามอเตอร์, เลือกระบบขับเคลื่อนไฟฟ้าและมอเตอร์รอกแล้ว ขั้นตอนที่สองของการสร้างไดอะแกรมโหลดสามารถทำได้ โดยคำนึงถึงผลกระทบของชั่วคราวบนไดอะแกรมโหลด
ในการสร้างไดอะแกรมโหลดที่สมบูรณ์จำเป็นต้องคำนึงถึงเวลาของการเร่งความเร็วและการชะลอตัวของไดรฟ์ไฟฟ้า, เวลาเปิดและปิดประตู, จำนวนการหยุดระหว่างการเคลื่อนที่ของรถ, เวลา ของผู้โดยสารเข้า-ออกในรอบการทำงานปกติที่สุด สำหรับลิฟต์ที่มีประตูทำงานอัตโนมัติ เวลาทั้งหมดที่สูญเสียไปจะพิจารณาจากการทำงานของประตูและการเติมรถคือ 6-8 วินาที
เวลาของการเร่งความเร็วและการชะลอตัวของรถสามารถกำหนดได้จากไดอะแกรมการเคลื่อนไหวหากทราบความเร็วที่ระบุของรถและค่าการเร่งความเร็ว (การชะลอตัว) และการกระตุกที่อนุญาต ตามไดอะแกรมโหลดที่สร้างขึ้นตามโหมดคงที่และไดนามิกที่ระบุของระบบขับเคลื่อนไฟฟ้าจำเป็นต้องทำการคำนวณมอเตอร์เมื่อได้รับความร้อนโดยใช้วิธีใดวิธีหนึ่งที่รู้จักกันดี: การสูญเสียโดยเฉลี่ยหรือค่าที่เทียบเท่า
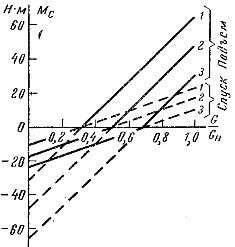
ข้าว. 2. การพึ่งพาแรงบิดของไดรฟ์ไฟฟ้าในการบรรทุกของรถ ลิฟต์ เมื่อหลังอยู่ที่ชั้นหนึ่ง (1) ตรงกลางเพลา (2) และที่ชั้นสุดท้าย (3)

ตัวอย่าง. ตามข้อมูลทางเทคนิคของลิฟต์โดยสารความเร็วสูง กำหนดช่วงเวลาคงที่บนเพลามอเตอร์ในโหมดการทำงานต่างๆ
ที่ให้ไว้:
• กำลังรับน้ำหนักสูงสุด Gn = = 4900 N;
• ความเร็วในการเคลื่อนที่ v = 1 m/s;
• ยกสูง H = = 43 ม.;
• น้ำหนักห้องโดยสาร G0 = 6860 N;
• น้ำหนักถ่วง Gnp = 9310 N;
• เส้นผ่านศูนย์กลางของคานลาก Dm = 0.95 ม.
• อัตราทดเกียร์ของกว้านเกียร์ i = 40;
• ประสิทธิภาพการส่ง โดยคำนึงถึงแรงเสียดทานของห้องโดยสารบนตัวกั้นเพลา η = 0.6;
• น้ำหนักเชือก GKAH = 862 N.
ตารางที่ 1

แรงดึง:


เมื่อระบบลิฟต์ทำงาน เมื่อ Fc > 0 เครื่องขับเคลื่อนไฟฟ้าจะทำงานในโหมดมอเตอร์ และเมื่อ Fc เป็น 0 และในโหมดมอเตอร์เมื่อ Fc < 0
ผลลัพธ์ของการคำนวณช่วงเวลาคงที่ตามสูตรสรุปไว้ในตาราง 1 และแสดงในกราฟของรูปที่ 2.โปรดทราบว่าการคำนวณที่แม่นยำยิ่งขึ้นควรคำนึงถึงความต้านทานต่อการเคลื่อนที่ของตัวนำเพลา ซึ่งอยู่ที่ 5-15% ของ Fc