ลักษณะทางกลของมอเตอร์เหนี่ยวนำที่โหมด แรงดัน และความถี่ต่างๆ
 ลักษณะทางกลของมอเตอร์เหนี่ยวนำสามารถแสดงเป็น n = f (M) หรือ n=e (I) อย่างไรก็ตามลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสมักจะแสดงในรูปแบบของการพึ่งพา M = f(S) โดยที่ C - การเลื่อน, S = (nc-n) / nc โดยที่ ns คือความเร็วแบบซิงโครนัส
ลักษณะทางกลของมอเตอร์เหนี่ยวนำสามารถแสดงเป็น n = f (M) หรือ n=e (I) อย่างไรก็ตามลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสมักจะแสดงในรูปแบบของการพึ่งพา M = f(S) โดยที่ C - การเลื่อน, S = (nc-n) / nc โดยที่ ns คือความเร็วแบบซิงโครนัส
ในทางปฏิบัติ สูตรง่ายๆ ที่เรียกว่าสูตร Kloss ใช้สำหรับการสร้างลักษณะทางกลแบบกราฟิก:

ที่นี่: Mk — ค่าแรงบิดวิกฤต (สูงสุด) ค่าช่วงเวลานี้สอดคล้องกับสลิปที่สำคัญ

โดยที่ λm = Mk / Mn
สูตรของ Kloss ใช้เพื่อแก้ปัญหาที่เกี่ยวข้องกับการขับเคลื่อนด้วยไฟฟ้าโดยใช้มอเตอร์เหนี่ยวนำ เมื่อใช้สูตร Kloss คุณสามารถสร้างกราฟลักษณะทางกลตามข้อมูลพาสปอร์ตของมอเตอร์เหนี่ยวนำ สำหรับการคำนวณในทางปฏิบัติ ควรพิจารณาเฉพาะเครื่องหมายบวกในสูตรเมื่อกำหนดช่วงเวลาวิกฤตก่อนรูท
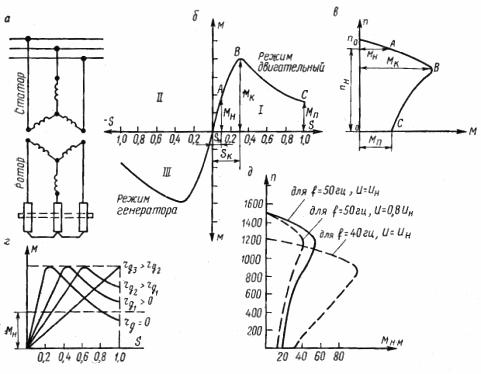
ข้าว. 1.มอเตอร์แบบอะซิงโครนัส: a — แผนผังไดอะแกรม b — ลักษณะทางกล M = f (S) — เป็นธรรมชาติในโหมดมอเตอร์และเครื่องกำเนิดไฟฟ้า c — ลักษณะทางกลตามธรรมชาติ n = f (M) ในโหมดมอเตอร์ d — ลักษณะทางกลของรีโอสแตทประดิษฐ์ , e — ลักษณะทางกลสำหรับแรงดันและความถี่ต่างๆ

มอเตอร์เหนี่ยวนำกรงกระรอก
ดังจะเห็นได้จากรูป 1 ลักษณะทางกลของมอเตอร์เหนี่ยวนำที่อยู่ในควอแดรนต์ I และ III ส่วนของเส้นโค้งในควอแดรนท์ I สอดคล้องกับค่าสลิปที่เป็นบวก และแสดงลักษณะของโหมดการทำงานของมอเตอร์แบบอะซิงโครนัส และในควอแดรนต์ III คือโหมดเจนเนอเรเตอร์ โหมดเครื่องยนต์เป็นสิ่งที่น่าสนใจในทางปฏิบัติมากที่สุด
กราฟของลักษณะทางกลของโหมดมอเตอร์ประกอบด้วยจุดลักษณะสามจุด: A, B, C และสามารถแบ่งออกเป็นสองส่วนตามเงื่อนไข: OB และ BC (รูปที่ 1, c)
จุด A สอดคล้องกับแรงบิดเล็กน้อยของมอเตอร์และถูกกำหนดโดยสูตร Mn = 9.55•103•(Strn /nn)
ช่วงเวลานี้สอดคล้องกัน สลิปเล็กน้อยซึ่งสำหรับเครื่องยนต์ที่ใช้ในอุตสาหกรรมทั่วไปจะมีค่าอยู่ในช่วงตั้งแต่ 1 ถึง 7% เช่น Sn = 1 — 7% ในขณะเดียวกัน เครื่องยนต์ขนาดเล็กจะมีความลื่นมากกว่า และเครื่องยนต์ขนาดใหญ่จะมีน้อยกว่า
มอเตอร์สลิปสูงที่มีไว้สำหรับรับแรงกระแทกมี Сn~15% ตัวอย่างเช่น มอเตอร์ไฟฟ้ากระแสสลับซีรีส์เดียว
จุด C ของคุณลักษณะนี้สอดคล้องกับค่าแรงบิดเริ่มต้นที่เกิดขึ้นบนเพลามอเตอร์เมื่อเริ่มต้น Mp ช่วงเวลานี้เรียกว่าเริ่มต้นหรือเริ่มต้น ในกรณีนี้ สลิปมีค่าเท่ากับเอกภาพและความเร็วเป็นศูนย์ แรงบิดเริ่มต้น ง่ายต่อการตรวจสอบจากข้อมูลของตารางอ้างอิงซึ่งแสดงอัตราส่วนของแรงบิดเริ่มต้นต่อ Mp / Mn ที่ระบุ
ขนาดของแรงบิดเริ่มต้นที่ค่าคงที่ของแรงดันและความถี่ปัจจุบันขึ้นอยู่กับความต้านทานที่ใช้งานอยู่ในวงจรโรเตอร์ ในกรณีนี้ ในขั้นต้นเมื่อความต้านทานแบบแอคทีฟเพิ่มขึ้น ค่าของแรงบิดเริ่มต้นจะเพิ่มขึ้น จนถึงค่าสูงสุดเมื่อความต้านทานแบบแอคทีฟของวงจรโรเตอร์เท่ากับค่าความต้านทานแบบเหนี่ยวนำทั้งหมดของมอเตอร์ ต่อจากนั้น เมื่อแรงต้านทานแบบแอกทีฟของโรเตอร์เพิ่มขึ้น ค่าของแรงบิดเริ่มต้นจะลดลง โดยมีค่าเป็นศูนย์ในขีดจำกัด
จุด C (รูปที่ 1, b และ c) สอดคล้องกับช่วงเวลาสูงสุดที่สามารถพัฒนาเครื่องยนต์ในช่วงทั้งหมดของการปฏิวัติตั้งแต่ n = 0 ถึง n = ns... ช่วงเวลานี้เรียกว่าช่วงเวลาวิกฤต (หรือพลิกคว่ำ) Mk . ช่วงเวลาวิกฤตยังสอดคล้องกับสลิปสลิปที่สำคัญ ยิ่งค่าของสลิปวิกฤต Sk น้อยลง เช่นเดียวกับค่าของสลิปเล็กน้อย Сn ความแข็งของลักษณะทางกลก็จะยิ่งมากขึ้นเท่านั้น
ช่วงเวลาเริ่มต้นและช่วงเวลาวิกฤตถูกกำหนดโดยช่วงเวลาที่กำหนด ตาม GOST สำหรับมอเตอร์ไฟฟ้าแบบกรงกระรอกต้องตรงตามเงื่อนไข Mn / Mn = 0.9 — 1.2, Mk / Mn = 1.65 — 2.5
ควรสังเกตว่าค่าของช่วงเวลาวิกฤตไม่ได้ขึ้นอยู่กับความต้านทานที่ใช้งานของวงจรโรเตอร์ ในขณะที่ค่าวิกฤต Сk เป็นสัดส่วนโดยตรงกับความต้านทานนี้ซึ่งหมายความว่าเมื่อเพิ่มความต้านทานแบบแอกทีฟของวงจรโรเตอร์ ค่าของช่วงเวลาวิกฤตจะไม่เปลี่ยนแปลง แต่เส้นโค้งแรงบิดสูงสุดจะเปลี่ยนเป็นค่าสลิปที่เพิ่มขึ้น (รูปที่ 1, d)
ขนาดของแรงบิดวิกฤตเป็นสัดส่วนโดยตรงกับกำลังสองของแรงดันไฟฟ้าที่ใช้กับสเตเตอร์และแปรผกผันกับกำลังสองของความถี่ของแรงดันไฟฟ้าและความถี่ของกระแสในสเตเตอร์
ตัวอย่างเช่น หากแรงดันไฟฟ้าที่จ่ายให้กับมอเตอร์มีค่าเท่ากับ 85% ของค่าที่กำหนด ขนาดของแรงบิดวิกฤตจะเท่ากับ 0.852 = 0.7225 = 72.25% ของแรงบิดวิกฤตที่แรงดันไฟฟ้าที่กำหนด
สังเกตตรงกันข้ามเมื่อเปลี่ยนความถี่ ตัวอย่างเช่น หากมอเตอร์ที่ออกแบบให้ทำงานด้วยความถี่กระแส = 60 Hz กระแสจ่ายที่มีความถี่ = 50 Hz โมเมนต์วิกฤตจะมาอยู่ที่ (60/50)2=1.44 เท่ามากกว่า ค่าความถี่อย่างเป็นทางการ (รูปที่ 1, e)
ช่วงเวลาวิกฤตแสดงถึงความสามารถในการรับน้ำหนักเกินในทันทีของมอเตอร์ นั่นคือ แสดงให้เห็นว่าช่วงเวลาใด (ในไม่กี่วินาที) ของการโอเวอร์โหลดที่มอเตอร์สามารถทนได้โดยไม่มีผลกระทบที่เป็นอันตรายใดๆ

ส่วนของคุณสมบัติเชิงกลจากศูนย์ถึงค่าสูงสุด (วิกฤต) (ดูรูปที่ 1, biv) เรียกว่าส่วนที่เสถียรของคุณสมบัติและส่วน BC (รูปที่ 1, c) - ส่วนที่ไม่เสถียร
แผนกนี้อธิบายได้จากข้อเท็จจริงที่ว่าในส่วนที่เพิ่มขึ้นของลักษณะ OF ที่มีสลิปเพิ่มขึ้นคือ เมื่อความเร็วลดลง แรงบิดที่พัฒนาโดยเครื่องยนต์จะเพิ่มขึ้นซึ่งหมายความว่าเมื่อโหลดเพิ่มขึ้น นั่นคือเมื่อแรงบิดในการเบรกเพิ่มขึ้น ความเร็วในการหมุนของมอเตอร์จะลดลง และแรงบิดจะเพิ่มขึ้นเมื่อมันเพิ่มขึ้น เมื่อโหลดลดลง ในทางกลับกัน ความเร็วจะเพิ่มขึ้นและแรงบิดจะลดลง เมื่อโหลดเปลี่ยนแปลงตลอดช่วงของชิ้นส่วนที่มั่นคงในลักษณะนี้ ความเร็วรอบและแรงบิดของมอเตอร์จะเปลี่ยนไป
มอเตอร์ไม่สามารถพัฒนาเกินแรงบิดวิกฤต และถ้าแรงบิดในการเบรกสูงกว่า มอเตอร์จะต้องหยุดอย่างหลีกเลี่ยงไม่ได้ การพลิกคว่ำของเครื่องยนต์เกิดขึ้นอย่างที่พวกเขาพูด
คุณลักษณะเชิงกลที่ค่าคงที่ U และ I และไม่มีความต้านทานเพิ่มเติมในวงจรโรเตอร์เรียกว่าคุณลักษณะตามธรรมชาติ (ลักษณะของมอเตอร์เหนี่ยวนำกรงกระรอกที่มีโรเตอร์แบบพันโดยไม่มีความต้านทานเพิ่มเติมในวงจรโรเตอร์) ลักษณะประดิษฐ์หรือรีโอสแตติกเรียกว่าคุณสมบัติที่สอดคล้องกับความต้านทานเพิ่มเติมในวงจรโรเตอร์
ค่าแรงบิดเริ่มต้นทั้งหมดจะแตกต่างกันและขึ้นอยู่กับความต้านทานที่ใช้งานของวงจรโรเตอร์ ตัวเลื่อนที่มีขนาดต่างกันสอดคล้องกับแรงบิดเล็กน้อย Mn เมื่อความต้านทานของวงจรโรเตอร์เพิ่มขึ้น การลื่นไถลจะเพิ่มขึ้น ดังนั้นความเร็วของมอเตอร์จึงลดลง
เนื่องจากการรวมความต้านทานแบบแอกทีฟไว้ในวงจรโรเตอร์ ลักษณะทางกลในส่วนที่มั่นคงจึงถูกยืดออกในทิศทางของการลื่นที่เพิ่มขึ้นตามสัดส่วนกับความต้านทานซึ่งหมายความว่าความเร็วของมอเตอร์เริ่มแปรผันอย่างมากขึ้นอยู่กับโหลดของเพลา และลักษณะแข็งจะอ่อนลง