คุณสมบัติการควบคุมของมอเตอร์ไฟฟ้า
 การควบคุมค่าใด ๆ ของกระบวนการทางกายภาพ (พารามิเตอร์ใด ๆ ) หมายถึงการรักษาค่าที่กำหนดในระดับที่กำหนดหรือเปลี่ยนแปลงตามกฎหมายที่กำหนด
การควบคุมค่าใด ๆ ของกระบวนการทางกายภาพ (พารามิเตอร์ใด ๆ ) หมายถึงการรักษาค่าที่กำหนดในระดับที่กำหนดหรือเปลี่ยนแปลงตามกฎหมายที่กำหนด
แอคชูเอเตอร์หรือกลไกการผลิตแต่ละตัวต้องการความเร็วในการหมุนที่แตกต่างกันของมอเตอร์แอคชูเอเตอร์สำหรับการทำงานปกติ
ตัวอย่างเช่น แต่ละส่วนของเครื่องทำกระดาษจะต้องหมุนด้วยความเร็วคงที่อย่างเคร่งครัดโดยไม่คำนึงถึงการเปลี่ยนแปลงของโหลด และไดรฟ์จะต้องสามารถรักษาความเร็วนี้ไว้ได้และเปลี่ยนความเร็วของแต่ละส่วนทีละส่วนและของทั้งเครื่องกระดาษโดยรวมได้อย่างราบรื่น
ความเร็วของมอเตอร์ไฟฟ้าถูกควบคุมด้วยวิธีต่างๆ สิ่งนี้จำเป็นต้องทราบเพื่อการเลือกมอเตอร์ขับเคลื่อนที่ถูกต้องสำหรับการขับเคลื่อน ไดรฟ์แตกต่างกันไปขึ้นอยู่กับค่าของกำลังและโมเมนต์บนเพลาตามขนาดของความเร็ว
กลไกบางอย่างรักษาค่าแรงบิดคงที่เมื่อความเร็วเปลี่ยนไป ตัวอย่างเช่น เครื่องตัดโลหะ… ในกรณีนี้ กำลังจะเปลี่ยนตามสัดส่วนความเร็วของการหมุน (ภาพกราฟิก จะแสดงเป็นเส้นตรงในรูปที่ 1)
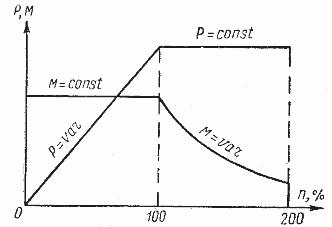
ข้าว. 1. โค้งควบคุมความเร็วที่กำลังคงที่และแรงบิดคงที่
กลไกอื่นๆ ต้องการพลังงานคงที่ P เมื่อความเร็วเปลี่ยน (เช่น กลไกการยกและการขนส่ง). ในกรณีนี้ ขนาดของโมเมนต์เปลี่ยนไปตามกฎไฮเปอร์โบลา
คุณสามารถสร้างกราฟโดยใช้สูตร P = Мω10-3kWh
โดยที่: M คือโมเมนต์ของเพลา, N x m, ω = (2πn) / 60 — ความเร็วเชิงมุม
ในรูป 1 แสดงเส้นโค้งรวมที่เมื่อความเร็วเปลี่ยนจากศูนย์เป็นพิกัด แรงบิดจะคงที่ ในกรณีนี้ พลังงานจะเพิ่มขึ้นเป็นเส้นตรงผ่านจุดกำเนิด จากนั้นด้วยความเร็วที่เพิ่มขึ้นอีก พลังงานจะคงที่และโมเมนต์จะลดลงตามกฎของไฮเปอร์โบลา
อ่านเพิ่มเติม: คุณลักษณะทางกลของมอเตอร์ไฟฟ้าและกลไกการผลิต