ย้อนกลับและหยุดมอเตอร์เหนี่ยวนำแบบกรงกระรอก
มอเตอร์เหนี่ยวนำเป็นเครื่องที่พลิกกลับได้ ในการเปลี่ยนทิศทางการหมุนของโรเตอร์ จำเป็นต้องเปลี่ยนทิศทางการหมุนของสนามแม่เหล็ก (โดยการเปลี่ยนสายไฟไปยังขั้วของมอเตอร์ทั้งสองเฟส) — วงจรสตาร์ทเครื่องยนต์และเบรก
ลักษณะทางกลของการหมุนสองทิศทางแสดงในรูปที่ 1.
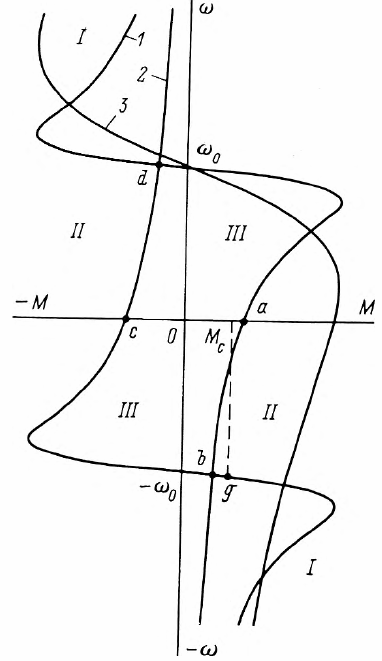
ข้าว. 1. ตระกูลคุณสมบัติทางกลของมอเตอร์เหนี่ยวนำสำหรับการทำงานย้อนกลับในโหมดหยุดพร้อมการจ่ายพลังงานให้กับเครือข่าย (I) โหมดการต่อต้าน (II) และมอเตอร์ (III) 1, 2 — ธรรมชาติ 3 — เทียม
มอเตอร์เหนี่ยวนำแบบกรงกระรอกไม่เพียงใช้เป็นมอเตอร์เท่านั้น แต่ยังใช้เป็นเบรกได้อีกด้วย ในโหมดหยุดทำงาน มอเตอร์ไฟฟ้าแต่ละตัวจะทำงานเป็นเครื่องกำเนิดไฟฟ้าเสมอ ในกรณีนี้ มอเตอร์ไฟฟ้าแบบเหนี่ยวนำที่มีโรเตอร์กรงกระรอกสามารถมีโหมดการเบรกได้สามโหมด
ในโหมดเบรกแบบปฏิรูป เครื่องจะทำงานโดยมีการลื่นไถล ในกรณีนี้ ความเร็วของโรเตอร์จะเกินความเร็วของการหมุนของสนามแม่เหล็กแน่นอน ในการเปลี่ยนไปใช้โหมดนี้ ต้องใช้โมเมนต์แอคทีฟภายนอกที่ด้านข้างของเพลา
โหมดป้อนกลับใช้กันอย่างแพร่หลายในการติดตั้งแบบยก ในระหว่างการสืบเชื้อสาย ระบบขับเคลื่อนเนื่องจากพลังงานศักย์ของโหลดสามารถได้รับความเร็วที่เกินความเร็วของการหมุนของสนามแม่เหล็ก และการสืบเชื้อสายจะเกิดขึ้นในสภาวะสมดุลที่สอดคล้องกับจุดหนึ่ง g บนลักษณะทางกล , เมื่อช่วงเวลาคงที่ที่สร้างขึ้นโดยโหลดจากมากไปน้อย จะถูกทำให้สมดุลโดยแรงบิดในการเบรกของเครื่องยนต์
ในไดรฟ์ทั่วไปที่มีแรงบิดคงที่แบบรีแอกทีฟ โหมดดังกล่าวจะถูกนำไปใช้โดยวงจรควบคุมพิเศษเท่านั้น ซึ่งทำให้สามารถลดความเร็วของการหมุนของสนามแม่เหล็กได้ ลักษณะทางกลของเครื่องเหนี่ยวนำสำหรับโหมดป้อนกลับจะแสดงในรูปเดียวกัน 1.
ดังที่แสดงไว้ แรงบิดสูงสุดในโหมดเครื่องกำเนิดไฟฟ้าจะสูงกว่าในโหมดมอเตอร์เล็กน้อย และสลิปที่มีค่าสัมบูรณ์จะเท่ากัน
เครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสมีช่วงแคบมากกล่าวคือ โรงไฟฟ้าพลังงานลม... เนื่องจากแรงลมไม่คงที่ ดังนั้นความเร็วของการหมุนของอุปกรณ์จึงเปลี่ยนไปอย่างมาก จึงควรใช้เครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสภายใต้เงื่อนไขเหล่านี้
โหมดที่ใช้กันอย่างแพร่หลายที่สุดคือโหมดการเบรก - ฝ่ายค้าน การเปลี่ยนไปใช้โหมดนี้ของมอเตอร์แบบอะซิงโครนัสรวมถึงมอเตอร์กระแสตรงเป็นไปได้ในสองกรณี (รูปที่ 1): ด้วยแรงบิดคงที่ที่เพิ่มขึ้นอย่างมาก (ส่วน a) หรือเมื่อเปลี่ยนขดลวดสเตเตอร์สำหรับทิศทางการหมุนที่แตกต่างกัน ( ส่วนซีดี).
ในทั้งสองกรณี มอเตอร์จะทำงานโดยมีสลิปมากกว่า 1 จนกว่ากระแสจะเกินกระแสเริ่มต้น ดังนั้นสำหรับมอเตอร์กรงกระรอก โหมดนี้สามารถใช้เพื่อหยุดไดรฟ์อย่างรวดเร็วเท่านั้น
เมื่อถึงความเร็วเป็นศูนย์ ต้องถอดมอเตอร์ออกจากแหล่งจ่ายไฟหลัก มิฉะนั้นจะมีแนวโน้มที่จะเร่งความเร็วไปในทิศทางตรงกันข้าม
เมื่อทำการเบรกโดยมอเตอร์โรเตอร์ที่มีบาดแผลตรงข้ามกัน จะต้องใส่ความต้านทานรีโอสแตตในวงจรโรเตอร์เพื่อจำกัดกระแสและเพิ่มแรงบิดในการเบรก
นอกจากนี้ยังเป็นไปได้ โหมดเบรกแบบไดนามิก… อย่างไรก็ตาม สิ่งนี้ทำให้เกิดความยุ่งยากบางประการ เมื่อมอเตอร์ถูกตัดการเชื่อมต่อจากแหล่งจ่ายไฟหลัก สนามแม่เหล็กของเครื่องก็จะหายไปเช่นกัน เป็นไปได้ที่จะกระตุ้นเครื่องเหนี่ยวนำจากแหล่งกระแสตรงซึ่งเชื่อมต่อกับสเตเตอร์ที่ตัดการเชื่อมต่อจากเครือข่ายกระแสสลับ แหล่งที่มาควรให้กระแสในสเตเตอร์ที่คดเคี้ยวใกล้เคียงกับค่าเล็กน้อย เนื่องจากกระแสไฟฟ้านี้ถูกจำกัดด้วยความต้านทานไฟฟ้าของขดลวดเท่านั้น แรงดันไฟฟ้าของแหล่งจ่ายกระแสตรงจึงต้องต่ำ (โดยทั่วไปคือ 10 — 12 V)
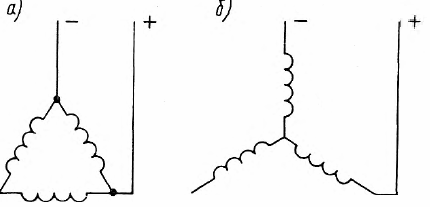
ข้าว. 2. การเชื่อมต่อสเตเตอร์ของมอเตอร์เหนี่ยวนำกับแหล่งจ่ายไฟ DC ในโหมดเบรกแบบไดนามิกเมื่อเชื่อมต่อในเดลต้า (a) และสตาร์ (b)
การกระตุ้นตัวเองยังใช้สำหรับการเบรกแบบไดนามิก ตัวเก็บประจุเชื่อมต่อกับสเตเตอร์โดยไม่ได้เชื่อมต่อจากแหล่งจ่ายไฟหลัก
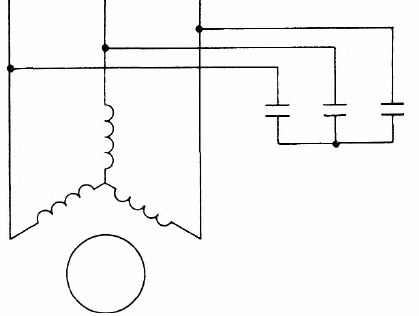
ข้าว. 3. แผนผังของการเบรกแบบไดนามิกของมอเตอร์เหนี่ยวนำที่ตื่นเต้นในตัวเอง
ขณะที่โรเตอร์หมุน EMF จะถูกสร้างขึ้นในวงจรสเตเตอร์เนื่องจากการดึงดูดแม่เหล็กที่เหลืออยู่และกระแสไหลผ่านขดลวดสเตเตอร์และผ่านตัวเก็บประจุเมื่อถึงความเร็วที่กำหนดในวงจรสเตเตอร์ สภาวะเรโซแนนซ์จะเกิดขึ้น: ผลรวมของความต้านทานแบบเหนี่ยวนำจะเท่ากับความต้านทานแบบคาปาซิทีฟ กระบวนการกระตุ้นตัวเองอย่างเข้มข้นของเครื่องจะเริ่มขึ้น ซึ่งจะนำไปสู่การเพิ่มขึ้นของ EMF โหมดการกระตุ้นตัวเองจะสิ้นสุดลงเมื่อ EMF ของเครื่อง E และแรงดันตกคร่อมตัวเก็บประจุเท่ากัน
แรงบิดสูงสุดในการเบรกพร้อมความจุที่เพิ่มขึ้นจะเปลี่ยนเป็นความเร็วที่ต่ำลง ข้อเสียของโหมดการเบรกที่พิจารณาคือลักษณะของการเบรกเฉพาะในเขตความเร็วที่กำหนดและจำเป็นต้องใช้ตัวเก็บประจุขนาดใหญ่สำหรับการเบรกที่ความเร็วต่ำ
ในด้านบวก ไม่ต้องใช้แหล่งพลังงานเพิ่มเติม โหมดนี้ถูกนำมาใช้เสมอในการติดตั้งที่ตัวเก็บประจุตัวเก็บประจุเชื่อมต่อกับมอเตอร์เพื่อปรับปรุงตัวประกอบกำลังของเครือข่ายแหล่งจ่ายไฟ
ดูเพิ่มเติมในหัวข้อนี้: วงจรเบรกสำหรับมอเตอร์แบบอะซิงโครนัส