การสตาร์ทมอเตอร์เหนี่ยวนำแบบนุ่มนวลมีไว้เพื่ออะไร?
 ในบรรดามอเตอร์ทุกประเภท มอเตอร์เหนี่ยวนำเป็นมอเตอร์ที่ใช้กันอย่างแพร่หลายในอุตสาหกรรม และยังคงใช้แทนมอเตอร์กระแสตรงมากขึ้นเรื่อยๆ
ในบรรดามอเตอร์ทุกประเภท มอเตอร์เหนี่ยวนำเป็นมอเตอร์ที่ใช้กันอย่างแพร่หลายในอุตสาหกรรม และยังคงใช้แทนมอเตอร์กระแสตรงมากขึ้นเรื่อยๆ
มอเตอร์แบบอะซิงโครนัส แพร่หลายเนื่องจากคุณสมบัติต่อไปนี้: เครื่องยนต์ราคาถูก, ความเรียบง่ายของการออกแบบ, ความน่าเชื่อถือ, ประสิทธิภาพสูง ก่อนหน้านี้ มอเตอร์แบบอะซิงโครนัสด้อยกว่ามอเตอร์ไฟฟ้ากระแสตรงเฉพาะในกรณีที่ต้องมีการควบคุมความเร็วอย่างราบรื่น (เครื่องไส เครื่องยืดผม ไดรฟ์หลักแบบปรับได้ของโรงสีม้วน ฯลฯ) ในการขนส่งด้วยไฟฟ้าและในไดรฟ์พลังงานสูงที่มีการทำงานเป็นระยะ ( โรงสีย้อนกลับ) แนะนำอุตสาหกรรม ตัวแปลงความถี่แบบปรับได้ จะช่วยให้สามารถใช้มอเตอร์แบบอะซิงโครนัสได้อย่างกว้างขวางยิ่งขึ้น
ข้อเสียของมอเตอร์แบบอะซิงโครนัสคือ:
1) การพึ่งพากำลังสองของแรงบิดบนแรงดันไฟฟ้าเมื่อแรงดันเครือข่ายลดลงแรงบิดเริ่มต้นและวิกฤตจะลดลงอย่างมาก
2) อันตรายจากความร้อนสูงเกินไปของสเตเตอร์ โดยเฉพาะอย่างยิ่งเมื่อแรงดันไฟหลักเพิ่มขึ้น และโรเตอร์เมื่อแรงดันตก
3) ช่องว่างอากาศเล็ก ๆ ค่อนข้างลดความน่าเชื่อถือของเครื่องยนต์
4) กระแสเริ่มต้นขนาดใหญ่ของมอเตอร์แบบอะซิงโครนัส… เมื่อสตาร์ทมอเตอร์เหนี่ยวนำด้วยโรเตอร์แบบกรงกระรอก กระแสสเตเตอร์จะสูงกว่าค่าพิกัด 5-10 เท่า กระแสสูงในสเตเตอร์นั้นไม่สามารถยอมรับได้ในแง่ของแรงไดนามิกในขดลวดและความร้อนของขดลวด โหมดชั่วคราวที่มีกระแสไหลเข้ามากอาจเกิดขึ้นได้ในมอเตอร์แบบอะซิงโครนัส ไม่เพียงแต่เมื่อมอเตอร์เชื่อมต่อกับกริดเท่านั้น แต่ยังรวมถึงเมื่อมอเตอร์กลับด้านและผ่อนความเร็วลงด้วย
เหตุใดคุณจึงควรจำกัดกระแสไหลเข้าในขดลวดสเตเตอร์ของมอเตอร์เหนี่ยวนำแบบกรงกระรอก
ความจำเป็นในการจำกัดกระแสไฟฟ้าของมอเตอร์ถูกกำหนดโดยเหตุผลทางไฟฟ้าและทางกล สาเหตุของลักษณะทางไฟฟ้าของการ จำกัด กระแสไฟฟ้าของมอเตอร์สามารถเป็นได้ดังต่อไปนี้:
1) ลดไฟกระชากในเครือข่าย ในบางกรณี สำหรับมอเตอร์ขนาดใหญ่ จำเป็นต้องจำกัดกระแสไหลเข้าให้อยู่ในระดับที่อนุญาตโดยระบบไฟฟ้า
2) การลดแรงเคลื่อนไฟฟ้าในขดลวดมอเตอร์
โดยปกติแล้วการลดกระแสไฟกระชากของเครือข่ายจำเป็นเมื่อสตาร์ทมอเตอร์เหนี่ยวนำขนาดใหญ่ที่มีกรง หากป้อนจากระบบจ่ายไฟที่ค่อนข้างต่ำ นอกจากนี้ สำหรับมอเตอร์ขนาดใหญ่ ผู้ผลิตเครื่องจักรไม่อนุญาตให้สตาร์ทโดยตรงเนื่องจากแรงอิเล็กโทรไดนามิกที่มากเกินไปที่ใบหน้าของขดลวดสเตเตอร์และโรเตอร์
เหตุผลสำหรับลักษณะทางกลของการจำกัดแรงบิดของมอเตอร์อาจมีความหลากหลายมาก ตัวอย่างเช่น เพื่อป้องกันการแตกหักหรือสึกหรออย่างรวดเร็วของเฟือง การลื่นไถลของสายพานจากลูกกลิ้ง การลื่นไถลของล้อของรถเข็นที่กำลังเคลื่อนที่ การเร่งหรือลดความเร็วมากซึ่งไม่สามารถยอมรับได้ อุปกรณ์หรือคนในยานพาหนะต่างๆ เป็นต้น บางครั้งจำเป็นต้องลดแรงบิดเริ่มต้นของเครื่องยนต์ แม้กระทั่งแรงบิดเพียงเล็กน้อย เพื่อลดแรงกระแทกของเกียร์และทำให้การเร่งความเร็วเป็นไปอย่างราบรื่น
ในทุกกรณีที่สภาวะการทำงานไม่ต้องการการเร่งความเร็วหรือการลดความเร็วแบบบังคับ ขอแนะนำให้คำนวณโหมดสำหรับกระแสไหลเข้าขั้นต่ำและแรงบิด ในขณะที่รักษาการส่งกำลังของกลไกและมอเตอร์

ซอฟต์สตาร์ทเครื่องยนต์
เพื่อ จำกัด กระแสจะใช้เครื่องปฏิกรณ์เริ่มต้นตัวต้านทานและตัวเปลี่ยนรูปแบบอัตโนมัติรวมถึงอุปกรณ์อิเล็กทรอนิกส์สมัยใหม่ - ซอฟต์สตาร์ท (มอเตอร์ซอฟต์สตาร์ทเตอร์)
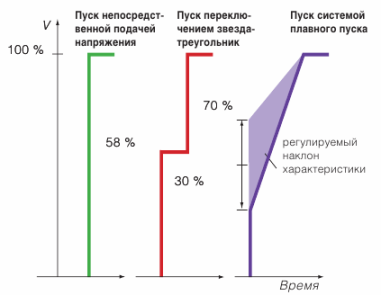
แรงดันมอเตอร์
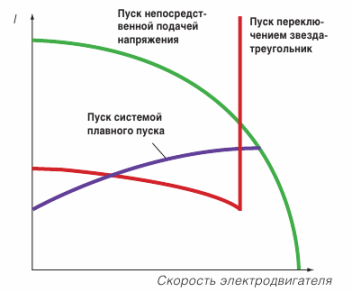
กระแสมอเตอร์
จำเป็นต้องให้ความสนใจกับความจริงที่ว่าการ จำกัด กระแสและแรงบิดโดยใช้ซอฟต์สตาร์ทของมอเตอร์ทำได้เนื่องจากความซับซ้อนของวงจรควบคุมและต้นทุนการติดตั้งที่เพิ่มขึ้นดังนั้นจึงควรใช้เฉพาะที่เท่านั้น เป็นธรรม
ดำเนินการต่อหัวข้อนี้: วิธีเลือกสตาร์ทเตอร์ที่เหมาะสม (ซอฟต์สตาร์ท)