วงจรควบคุมมอเตอร์ความเร็วรอบสองระดับ
 ในเครื่องตัดโลหะ กลไก และการติดตั้งทางเทคโนโลยีต่างๆ จะใช้ไดรฟ์ไฟฟ้าที่มีมอเตอร์ไฟฟ้าแบบอะซิงโครนัสสองความเร็ว ซึ่งในการควบคุมขั้นตอนของความเร็วทำได้โดยการเปลี่ยนจำนวนคู่ขั้วโดยการเปลี่ยนวงจรสวิตชิ่งของขดลวดสเตเตอร์ที่ทำขึ้นเป็นพิเศษ .
ในเครื่องตัดโลหะ กลไก และการติดตั้งทางเทคโนโลยีต่างๆ จะใช้ไดรฟ์ไฟฟ้าที่มีมอเตอร์ไฟฟ้าแบบอะซิงโครนัสสองความเร็ว ซึ่งในการควบคุมขั้นตอนของความเร็วทำได้โดยการเปลี่ยนจำนวนคู่ขั้วโดยการเปลี่ยนวงจรสวิตชิ่งของขดลวดสเตเตอร์ที่ทำขึ้นเป็นพิเศษ .
รูปแสดงไดอะแกรมของไดรฟ์ไฟฟ้าแบบย้อนกลับไม่ได้ มอเตอร์แบบอะซิงโครนัสสองความเร็ว… วงจรจัดให้มีการสลับสเตเตอร์ที่คดเคี้ยวจากเดลต้าเป็นดาวคู่ (Δ / YY) โครงร่างดังกล่าวใช้ในกลไกขับเคลื่อนด้วยไฟฟ้าหากเทคโนโลยีต้องการการควบคุมความเร็วด้วยพลังคงที่ของหน่วยงาน
คำสั่งการกำหนดเป้าหมายวงจรกำหนดโดยตัวควบคุม SM สามตำแหน่ง ในตำแหน่งเริ่มต้น เมื่อเปิดเครื่อง QF1 และ QF2 และตัวควบคุมอยู่ในตำแหน่งศูนย์ (ซ้าย) รีเลย์แรงดัน KV จะถูกกระตุ้นและหน้าสัมผัส KV ของมันจะถูกกระตุ้นด้วยตนเอง
เมื่อสวิตช์คอนโทรลเลอร์ไปที่ตำแหน่งแรก (HC) คอยล์ของคอนแทค KM1 (HC) จะได้รับพลังงาน คอนแทคทำงาน ปิดหน้าสัมผัส 3-6 ในวงจรของคอยล์ของคอนแทคเบรก KMT และเชื่อมต่อสเตเตอร์ ที่คดเคี้ยวในเดลต้า (Δ) ไปยังเครือข่าย . ในเวลาเดียวกัน คอนแทคเบรก KMT จะเปิดใช้งานและจ่ายไฟให้กับโซลินอยด์เบรก เบรกจะถูกปล่อย (ยกแผ่นอิเล็กโทรด) และมอเตอร์ไฟฟ้าจะสตาร์ทที่ความเร็วต่ำ (จำนวนเสาคือ 2p)
เมื่อตัวควบคุมถูกเปลี่ยนไปยังตำแหน่งที่สอง (BC) คอนแทคเตอร์ที่พัน KMl (HC) จะตัดการเชื่อมต่อสเตเตอร์ที่คดเคี้ยวออกจากแหล่งจ่ายไฟหลัก ขดลวดของคอนแทค KM2 (BC) และ KM3 (BC) จะถูกกระตุ้นและคอนแทคเตอร์จะทำงาน คอนแทค KM3 (BC) ปิดหน้าสัมผัสสร้างจุดศูนย์ของดาวคู่ คอนแทค KM2 (BC) ปิดหน้าสัมผัส 3-6 ในวงจรคอยล์ของคอนแทคเบรก KMT คอนแทค KMT ทำงานหรือยังคงเปิดอยู่ ในขณะเดียวกันคอนแทค KM2 (BC) จะเชื่อมต่อส่วนบนของดาวคู่ของขดลวดสเตเตอร์และมอเตอร์จะสตาร์ทด้วยความเร็วสูง (จำนวนขั้ว p)
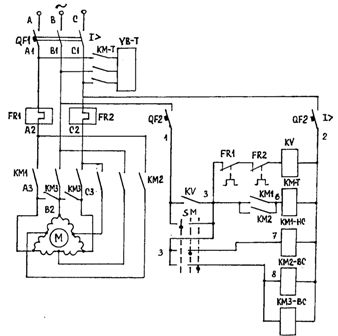
แผนภาพวงจรของมอเตอร์เหนี่ยวนำความเร็วสองระดับ
หากต้องการหยุดไดรฟ์ไฟฟ้า จำเป็นต้องเปลี่ยนตัวควบคุมไปที่ตำแหน่งศูนย์ ในกรณีนี้ คอนแทคเตอร์สูญเสียพลังงาน ขดลวดสเตเตอร์ถูกตัดการเชื่อมต่อจากเครือข่าย และหน้าสัมผัส KMT เปิดอยู่ คอนแทค KMT จะดึงพลังงานออกจากคอยล์เบรกแม่เหล็กไฟฟ้าและผ้าเบรกจะถูกนำไปใช้กับดรัมเบรก ไดรฟ์ไฟฟ้าจะหยุดทำงานภายใต้แรงต้านของโมเมนต์ Mc และโมเมนต์ Mmt ของเบรกเชิงกล