โซ่ขับสายพาน
 บทความจะตรวจสอบโครงร่างไดรฟ์ไฟฟ้าของสายพานบางชนิด ในรูป 1 แสดงแผนผังของไดรฟ์ไฟฟ้าของสายพานลำเลียงแต่ละเส้น ซึ่งความเร็วจะต้องเท่ากันอย่างเคร่งครัด ความต้องการดังกล่าวเกิดขึ้นในการผลิตอย่างต่อเนื่อง เมื่อผลิตภัณฑ์ต่าง ๆ หลังจากการดำเนินการทางเทคโนโลยีที่จำเป็นในสายงานที่แยกจากกัน จะต้องพบกันที่ไซต์การประกอบโดยสอดคล้องกันอย่างเคร่งครัด
บทความจะตรวจสอบโครงร่างไดรฟ์ไฟฟ้าของสายพานบางชนิด ในรูป 1 แสดงแผนผังของไดรฟ์ไฟฟ้าของสายพานลำเลียงแต่ละเส้น ซึ่งความเร็วจะต้องเท่ากันอย่างเคร่งครัด ความต้องการดังกล่าวเกิดขึ้นในการผลิตอย่างต่อเนื่อง เมื่อผลิตภัณฑ์ต่าง ๆ หลังจากการดำเนินการทางเทคโนโลยีที่จำเป็นในสายงานที่แยกจากกัน จะต้องพบกันที่ไซต์การประกอบโดยสอดคล้องกันอย่างเคร่งครัด
โครงร่างช่วยให้คุณสามารถเริ่มและหยุดสายพานลำเลียงหลายสายพร้อมกันและปรับความเร็วได้ การเคลื่อนไหวที่ประสานกันทำได้โดยการสลับมอเตอร์ตามรูปแบบเพลาซิงโครนัสด้วยตัวแปลงความถี่อินเวอร์เตอร์ทั่วไป การควบคุมความเร็วของมอเตอร์ D1 และ D2 ทำได้โดยการเปลี่ยนความเร็วของอินเวอร์เตอร์โดยใช้กระปุกเกียร์อัตราส่วนแปรผัน P
อนุญาตให้เริ่มสายพานโดยผู้ปฏิบัติงานที่ตรวจสอบการทำงานของสายพานในพื้นที่ที่สำคัญที่สุด เมื่อกดปุ่มพร้อม G1 และ G2 ไฟสัญญาณ LS1 และ LS2 จะสว่างขึ้นและรีเลย์ RG1 และ RG2 จะทำงาน หลังเตรียมรีเลย์สำหรับการเริ่มต้น RP
เมื่อคุณกดปุ่มเริ่ม RP จะถูกกระตุ้น ซึ่งจะเปิดคอนแทคเตอร์ L1 มีการซิงโครไนซ์เฟสเดียวของตำแหน่งอินเวอร์เตอร์ D1 และ D2 หลังจากการหน่วงเวลา รีเลย์ลูกตุ้มที่ติดตั้งในคอนแทคเตอร์ L1 และ L2 จะเปิด L2 ปิด L1 และเปิด LZ สลับกัน การสตาร์ทรีโอสแตตของมอเตอร์ตัวแปลงความถี่จะดำเนินการตามหลักการของเวลา (ไทม์รีเลย์ RU1, RU2, RUZ)
ในรูป 2 แสดงไดอะแกรมของไดรฟ์ไฟฟ้าของบันไดเลื่อนรถไฟใต้ดินซึ่งช่วยให้คุณทำงานกับการขึ้นและลงของผู้โดยสาร มอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์ที่มีกำลังสูงถึง 200 กิโลวัตต์ใช้เป็นมอเตอร์ขับเคลื่อน ในบางช่วงเวลาของวันด้วยจำนวนผู้โดยสารที่ไม่มาก บันไดเลื่อนสามารถทำงานได้โดยไม่ได้ใช้งานเป็นเวลานาน
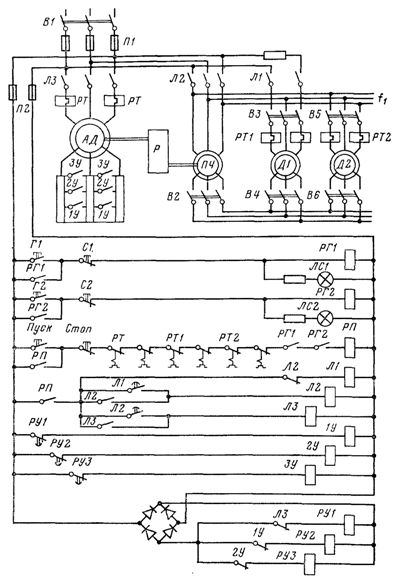
ข้าว. 1. แผนผังของไดรฟ์ไฟฟ้าของสายพานลำเลียงพร้อมการเคลื่อนไหวที่ประสานกัน
เพื่อเพิ่มตัวประกอบกำลังและประสิทธิภาพของมอเตอร์ เมื่อโหลดของเพลาลดลงเหลือประมาณ 40% ของค่าเล็กน้อย ขดลวดสเตเตอร์จะเปลี่ยนจากเดลต้าเป็นสตาร์ เมื่อโหลดเพิ่มขึ้น มันจะกลับเข้าไปในรูปสามเหลี่ยม
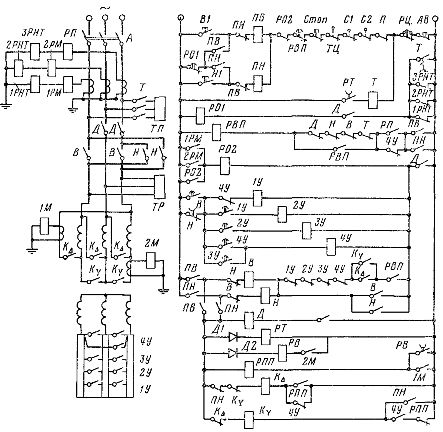
ข้าว. 2. โครงการขับเคลื่อนด้วยไฟฟ้าของบันไดเลื่อนรถไฟใต้ดิน
การสลับดังกล่าวจะทำโดยอัตโนมัติโดยรีเลย์กระแสเกิน 1M และ 2M ซึ่งควบคุมคอนแทคเตอร์ k∆ และ kY ผ่านรีเลย์ RPP และ РВ หน้าสัมผัส RV หน่วงการเปิดช่วยให้มั่นใจว่ามีวงจรคอยล์ RPP ในช่วงระหว่างปิด 2M และเปิด 1M
ในโหมดโคตรเครื่องกำเนิดไฟฟ้าที่มีโหลดเต็ม เครื่องยนต์จะโหลดน้อยลงอย่างมาก (เนื่องจากการสูญเสียเชิงกลของการติดตั้ง) เมื่อเทียบกับโหลดที่ใกล้เคียงกันในโหมดไต่ระดับดังนั้นในโหมดดรอป ขดลวดสเตเตอร์ของมอเตอร์จะเชื่อมต่อกับสตาร์เสมอ มอเตอร์สตาร์ทตามเวลาโดยใช้รีเลย์ลูกตุ้มบนคอนแทคคันเร่ง 1U-4U การหยุดเป็นแบบกลไก ในกรณีนี้ TP เบรกบริการติดตั้งอยู่บนเพลามอเตอร์ และติดตั้ง TP ความปลอดภัยบนเพลาขับเกียร์เพื่อให้แน่ใจว่าบันไดจะหยุดลงหากการเชื่อมต่อเชิงกลระหว่างเกียร์และเพลามอเตอร์ขาด
วงจรใช้อินเตอร์ล็อคความปลอดภัยทั่วไปที่อธิบายไว้ในส่วนก่อนหน้า: จากการทำงานผิดปกติของชิ้นส่วนกลไกของอุปกรณ์ — การถอดโซ่และราวจับ (สวิตช์จำกัด TC, P) การละเมิดโครงสร้างของขั้นตอน (สวิตช์จำกัด C1 และ C2 ), อุณหภูมิที่มากเกินไปของตลับลูกปืน ( รีเลย์ความร้อน 7) จากความเร็วเกิน (รีเลย์ความเร็วแรงเหวี่ยง RC)
นอกจากนี้ยังมีการป้องกันมอเตอร์: สูงสุด (รีเลย์ 1RM, 2RM) จากการโอเวอร์โหลด (รีเลย์ RP) จากการสูญเสียพลังงานจากมอเตอร์ (รีเลย์กระแสเป็นศูนย์ 1RNT, 2RNT, 3RNT) จากการเชื่อมหน้าสัมผัสปิดของคอนแทคไฟฟ้า (เปิดหน้าสัมผัส D, Y, B, T ในวงจรคอยล์ RVP และ 1U-4U ในวงจรคอยล์ B)
การป้องกันการสูญเสียพลังงาน ความร้อนสูงเกินของตลับลูกปืน และมอเตอร์โอเวอร์โหลดทำงานด้วยการหน่วงเวลาที่กำหนดโดยรีเลย์เวลา PO1 และ RVP การป้องกันทั้งหมด ยกเว้นรีเลย์ความเร็วของรีโมตคอนโทรล หยุดมอเตอร์โดยปลดการเชื่อมต่อจากแหล่งจ่ายไฟหลักและใช้เบรกบริการ TP เมื่อสิ้นสุดกระบวนการเบรกเท่านั้น หลังจากการหน่วงเวลาของรีเลย์ PT หมดลง TP เบรกนิรภัยจะทำงานเพิ่มเติมเมื่อรีเลย์ความเร็ว RC ทำงานหรือกดปุ่มหยุดฉุกเฉิน เบรกทั้งสองจะทำงานพร้อมกัน