ตัวอย่างของการวาดไดอะแกรมเวลาและบล็อกไดอะแกรมของการทำงานของกลไก
ในรูปแบบการควบคุมของสายเทคโนโลยี สถานะขององค์ประกอบเอาต์พุต เช่น แอคชูเอเตอร์ (รีเลย์แม่เหล็กไฟฟ้า สตาร์ทเตอร์แบบแม่เหล็ก โซลิดสเตตรีเลย์ ฯลฯ) ไม่เพียงแต่ถูกกำหนดโดยการรวมกันของอินพุตหรือองค์ประกอบรับ (ปุ่ม เซ็นเซอร์ ฯลฯ) แต่ยังกำหนดโดยลำดับของการเปลี่ยนแปลงตามเวลาด้วย
คำอธิบายด้วยวาจาของกระบวนการทางเทคโนโลยีที่ออกแบบสามารถนำเสนอในรูปแบบของตารางการเปลี่ยนแปลงของสัญญาณอินพุตและเอาต์พุตซึ่งเรียกว่าแผนภาพเวลาของกระบวนการทางเทคโนโลยี

ตัวอย่างของการสร้างไดอะแกรมเวลาจะทำขึ้นจากไดอะแกรมเส้นก่อนการทำความสะอาดเมล็ดพืช
คำอธิบายการทำงานของวงจร
เมื่อใช้สวิตช์ SA1 โหมดการทำงานจะถูกเลือก: อัตโนมัติ — โหมดการทำงานหลัก, แมนนวล — โหมดการว่าจ้าง
โหมดการว่าจ้างประกอบด้วยการจ่ายพลังงานผ่านปุ่มล็อค SB4-SB6 ไปยังขดลวดของสตาร์ตเตอร์แม่เหล็กของกลไกเชิงเส้น โดยผ่านลอจิกการควบคุมทั้งหมด ในโหมดนี้ผู้ปฏิบัติงานจะตัดสินใจเกี่ยวกับความยาวของเส้นหรือกลไกที่แยกจากกันการควบคุมการเติมถังจะดำเนินการด้วยสายตาเท่านั้น
ตามกฎแล้วโหมดการทำงานนี้ใช้ทั้งในโหมดการทำงานฉุกเฉินเมื่อลอจิกการควบคุมเสียและจำเป็นต้องดำเนินการตามกระบวนการทางเทคโนโลยีให้เสร็จสิ้นโดยไม่สูญเสียผลิตภัณฑ์ในสายการผลิตหรือระหว่างการทดสอบเดินเครื่องหลังจากซ่อมแซมกลไกบางอย่าง ในบรรทัดจำเป็นต้องเริ่มต้นเท่านั้นไม่ใช่กลไกเชิงเส้นทั้งหมด
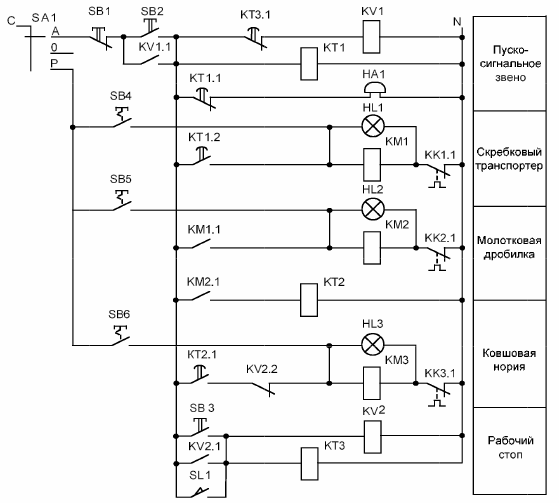
ข้าว. 1. วงจรควบคุมหน้าสัมผัสรีเลย์ของสายการทำความสะอาดเมล็ดพืชล่วงหน้า
หลังจากสวิตช์โหมดการทำงาน บล็อกสัญญาณเริ่มต้นจะรวมอยู่ในวงจรควบคุม ซึ่งช่วยให้สามารถปิดกริ่งและเปิดสายพานลำเลียงพร้อมการหน่วงเวลาได้ เมื่อสร้างวงจรหน้าสัมผัสรีเลย์ลำดับของการเปิดหรือปิดกลไกจะดำเนินการโดยใช้หน้าสัมผัสปิดของสตาร์ตเตอร์แม่เหล็ก
ดังนั้นในกรณีของเรา หากมีพลังงานบนขดลวดของแม่เหล็กสตาร์ทเตอร์ KM1 (สายพานลำเลียงมีดโกน) ตามลำดับ ผ่านหน้าสัมผัส KM1.1 พลังงานก็จะอยู่บนขดลวดของสตาร์ทเตอร์แม่เหล็ก KM2 (ค้อน) เช่นกัน
ในขณะเดียวกันก็เป็นไปไม่ได้ที่จะเริ่มต้นกลไกทั้งหมดของสายเนื่องจากระหว่างการทำงานโหมดการทำงานดังกล่าวอาจเกิดขึ้นเมื่อไดรฟ์ไฟฟ้าของกลไกทั้งสองของสายยังไม่ถึงโหมดการทำงานที่กำหนดและผลิตภัณฑ์คือ ส่งถึงพวกเขาผ่านกลไกส่วนหัวส่งผลให้สายหยุดฉุกเฉิน ดังนั้นในวงจรควบคุมจึงจ่ายพลังงานให้กับขดลวดของสตาร์ทแม่เหล็ก KM3 ของกลไกส่วนหัวพร้อมการหน่วงเวลาที่รับรู้โดยรีเลย์เวลา KT2
กลไกเชิงเส้นกำลังทำงานอยู่ งานกำลังดำเนินการอยู่ บางครั้งระหว่างการทำงาน อาจมีบางครั้งที่ถังบรรจุยังไม่เต็มและต้องปิดสายการผลิต ในกรณีนี้จะใช้บล็อก "หยุดการทำงาน" ในรูปแบบการควบคุมซึ่งทำให้สามารถปิดกลไกทั้งหมดของบรรทัดในลำดับที่ถูกต้อง (ในทิศทางของการเคลื่อนที่ของผลิตภัณฑ์ตามบรรทัด)
ดังนั้นเมื่อกดปุ่ม SB3 รีเลย์ระดับกลาง KV2 จะเปิดขึ้น หน้าสัมผัสเปิดซึ่ง KV2.2 จะตัดวงจรด้วยขดลวด KM3 กลไกหัวสายจะปิด ในเวลาเดียวกันรีเลย์เวลา KT3 เตรียมรายงานเกี่ยวกับเวลาการทำงานของสายสำหรับทำความสะอาดกลไกจากผลิตภัณฑ์
หลังจากเวลาหนึ่งหน้าสัมผัสของรีเลย์เวลา KT3.1 จะตัดวงจรด้วยรีเลย์กลาง KV1 ซึ่งหน้าสัมผัสจะข้ามปุ่มเริ่มต้น สิ่งนี้ทำให้วงจรควบคุมทั้งหมดหยุดลง และเป็นผลให้กลไกเชิงเส้นหยุดลง อัลกอริทึมที่คล้ายกันสำหรับการทำงานของวงจรควบคุมเมื่อสั่งงานเซ็นเซอร์ระดับในถัง SL1
การป้องกันมอเตอร์ไฟฟ้าเชิงเส้นจากการโอเวอร์โหลดในรูปแบบการควบคุมที่นำเสนอนั้นดำเนินการโดยการขัดจังหวะหน้าสัมผัสของรีเลย์ความร้อน KK1.1 ... KK3.1 ซึ่งติดตั้งตามลำดับในวงจรที่มีขดลวดสตาร์ทแม่เหล็ก KM1 .. .กม.3.
สำหรับการควบคุมการมองเห็นของกลไกเชิงเส้นในวงจรควบคุมมีไฟแสดงสถานะ HL1 ... HL3 ในการทำงานปกติของกลไกเชิงเส้น ไฟแสดงสถานะจะสว่างขึ้น ในกรณีที่มีการปิดเครื่องฉุกเฉิน พลังงานในวงจรที่มีแม่เหล็กสตาร์ทเตอร์จะหายไปและไฟแสดงสถานะจะดับลงตามลำดับ
ตามรูปแบบของโหมดการทำงานอัตโนมัติหลักไฟฟ้าจำเป็นต้องใช้ปุ่ม 3 ปุ่มสำหรับสายการทำความสะอาดเมล็ดพืชล่วงหน้า: SB1 «หยุด», SB2 «เริ่ม» และ SB3 «หยุดทำงาน» รวมถึงเซ็นเซอร์ระดับ SL1 ดังนั้นเราจึงมีองค์ประกอบอินพุต 4 รายการ นอกจากนี้ยังยอมรับปุ่มด้วยการคืนตัวเองเช่น โดยไม่ต้องแก้ไขสถานะการเปิดเครื่อง
ตัวอย่างของการสร้างแผนภูมิเวลา
รายการส่งออก 4: ระฆัง HA1, สายพานลำเลียง KM1, เครื่องบดค้อน KM2 และลิฟต์ถัง KM3
เมื่อกดปุ่ม SB2 «Start» ลิงค์ทริกเกอร์แรก (กระดิ่ง HA1) ควรเปิดใช้งานเป็นเวลา 10 วินาทีเพื่อเตือนบุคลากรว่าสายการผลิตกำลังจะเริ่มขึ้น
หลังจากระฆังของ HA1 ดังขึ้น กล่าวคือ 10 วินาทีหลังจากกดปุ่ม "Start" SB2 86 ระบบลำเลียงเครื่องขูด KM1 และเครื่องบดกระแทก KM2 จะเปิดทำงาน (ดูรูปที่ 2)
เวลาในการทำงานของกลไกจะพิจารณาจากผลผลิตและปริมาณการผลิต ผลผลิตของสายพานลำเลียงมีดโกน เครื่องบดค้อน และลิฟต์ถังคือ 5 ตันต่อชั่วโมง 3 ตันต่อชั่วโมง และ 2 ตันต่อชั่วโมง ตามลำดับ ปริมาตรของเมล็ดพืชจะถูกกำหนด ขึ้นอยู่กับปริมาตรของกรวยและเมล็ดพืชหนึ่งกิโลกรัมต่อ 1 ลบ.ม.
ธัญพืชของพืชต่างชนิดกันมีรูปร่าง ความหนาแน่น และน้ำหนักที่แตกต่างกัน ดังนั้นธัญพืชแต่ละชนิดหนึ่งลูกบาศก์เมตรจึงไม่สามารถชั่งน้ำหนักได้เท่ากัน
มาดูปริมาตรของบังเกอร์ 5 ม. เมล็ดข้าวที่บรรทุกคือบัควีทซึ่งมีน้ำหนัก 560 - 660 กก. สถานะเริ่มต้นของถังรีไซเคิลว่างเปล่า จากนั้นปริมาณธัญพืชเต็มภาชนะ: N = 580 x 5 = 2900 กก.
ลิฟต์ฝากข้อมูลมีผลผลิตต่ำที่สุดในบรรดากลไกทั้งหมด เขายังส่งข้าวเข้าแถวด้วย เวลาทำงานจะเป็น: Tm3 = 2000/2900 = 0.689 h = 41 นาที
เวลาทำงานของกลไกที่เหลือจะมากกว่า 41 นาทีและพิจารณาจากตรรกะของวงจร
หลังจากเปิดเครื่องขูดสายพาน KM1 และเครื่องคั้น KM2 แล้ว จะต้องให้เวลาในการเร่งความเร็ว เวลาเร่งสำหรับกลไกทั้งหมดใช้เวลา 10 วินาที รถยกถัง KM3 เริ่มทำงานครั้งสุดท้าย (10 วินาทีหลังจากสตาร์ท KM1 และ KM2) เพื่อไม่ให้เกิดการอุดตันของผลิตภัณฑ์บนเครื่องบดค้อน KM2 และสายพานลำเลียง KM1 หลังจากผ่านไป 41 นาที ผลิตภัณฑ์ทั้งหมดที่จำเป็นในการเติมถังจะผ่านลิฟต์ถัง KM3
เซ็นเซอร์ระดับ SL ได้รับการติดตั้งในลักษณะที่รับสัญญาณการเติมถังได้ก่อนที่กากของผลิตภัณฑ์จะผ่านเครื่องบดแบบค้อน KM2 และสายพานลำเลียงแบบขูด KM1
เมื่อเซ็นเซอร์ระดับ SL1 ทำงาน กลไกส่วนหัว KM3 จะปิด (หลังจาก 41 นาที 20 วินาทีหลังจากกดปุ่ม SB2 «Start») ด้วยการหน่วงเวลา KM1 และ KM2 จะปิดพร้อมกัน การหน่วงเวลานี้สามารถสันนิษฐานได้เท่ากับ 20 วินาที
แผนภาพเวลาสำหรับการทำงานปกติแสดงในรูปที่ 2
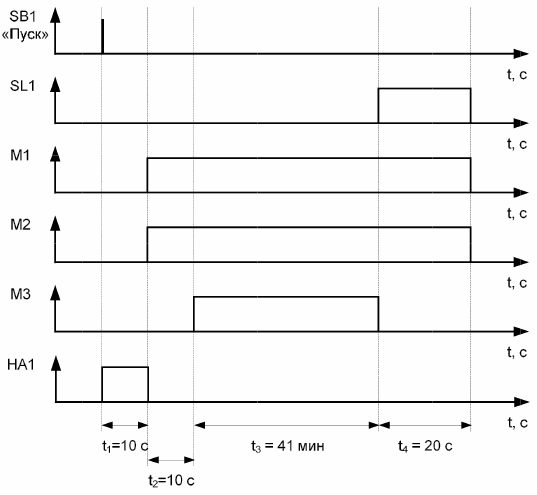
ข้าว. 2. แผนภาพเวลาสำหรับการทำงานปกติ
ในโหมด «หยุดการทำงาน» ผู้ปฏิบัติงานสามารถหยุดกระบวนการก่อนที่จะสั่งงานเซ็นเซอร์ระดับ SL1 ดังนั้น ในกรณีนี้ จึงเป็นไปไม่ได้ที่จะกำหนดเวลาการทำงานของกลไก ในโหมด «หยุดทั่วไป» กลไกทั้งหมดจะปิดใช้งานทันที
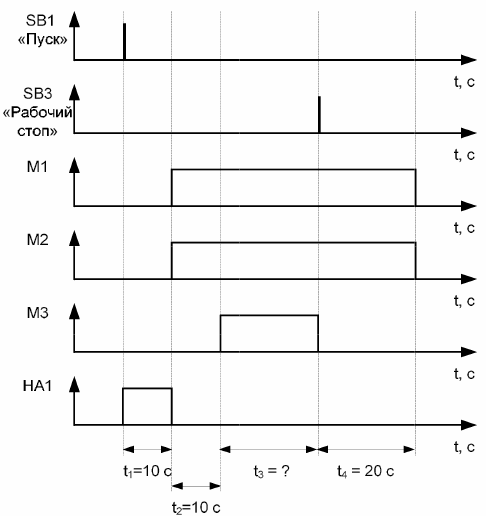
ข้าว. 3. แผนภาพเวลาสำหรับโหมดการทำงาน «หยุดการทำงาน»
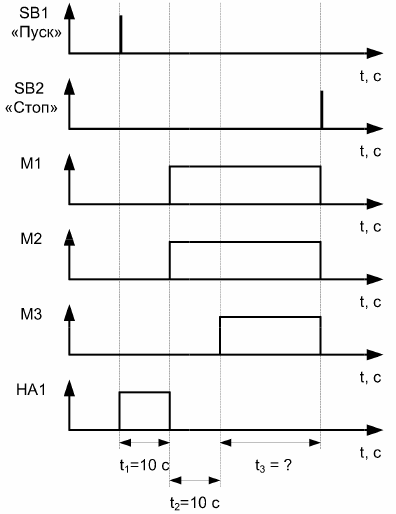
ข้าว. 4. แผนภาพเวลาสำหรับโหมด «Total stop»
ตัวอย่างของการสร้างบล็อกไดอะแกรมของการทำงานของกลไก
บล็อกไดอะแกรมของกระบวนการทางเทคโนโลยีจะต้องแสดงอัลกอริทึมของงานอย่างชัดเจนสำหรับสิ่งนี้จะใช้การกำหนดพิเศษของการกระทำบางอย่าง
รูปที่ 5 แสดงบล็อกไดอะแกรมตัวอย่างสำหรับเส้นทำความสะอาดเมล็ดพืชล่วงหน้า แผนภาพบล็อกที่นำเสนอแสดงตัวเลือกที่เป็นไปได้ทั้งหมดสำหรับการทำงานของกระบวนการทางเทคโนโลยี สถานการณ์ "อุบัติเหตุ" สามารถเกิดขึ้นได้ทุกเมื่อระหว่างการทำงานของสายทำความสะอาดเมล็ดพืชล่วงหน้าหลังจากกดปุ่ม "เริ่ม" SB2
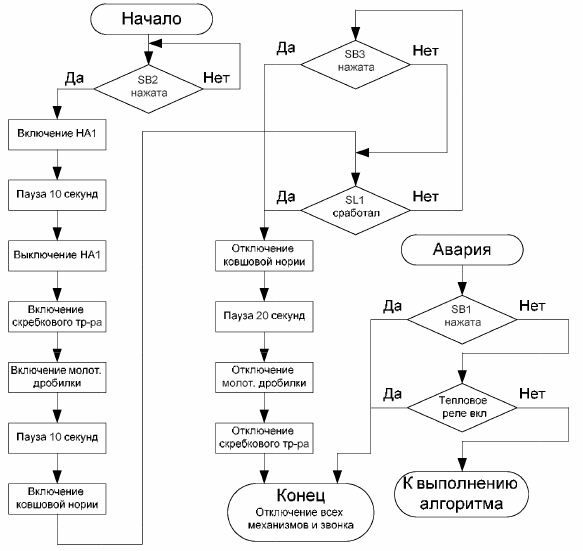
ข้าว. 5. บล็อกไดอะแกรมของเส้นทำความสะอาดเมล็ดพืชล่วงหน้า