วงจรปิดกั้นและส่งสัญญาณอัตโนมัติ
 ในไดรฟ์หลายมอเตอร์ ลำดับที่กำหนดไว้ของการเปิด ปิด การย้อนกลับ การควบคุม และการหยุดมอเตอร์ต่างๆ มักจะจัดให้มีขึ้นโดยการเชื่อมต่อที่ประสานกันระหว่างวงจรควบคุมของมอเตอร์ไฟฟ้าแต่ละตัว
ในไดรฟ์หลายมอเตอร์ ลำดับที่กำหนดไว้ของการเปิด ปิด การย้อนกลับ การควบคุม และการหยุดมอเตอร์ต่างๆ มักจะจัดให้มีขึ้นโดยการเชื่อมต่อที่ประสานกันระหว่างวงจรควบคุมของมอเตอร์ไฟฟ้าแต่ละตัว
ต่อไปนี้เป็นแผนการล็อคอัตโนมัติบางส่วนที่ใช้ในการควบคุมมอเตอร์โรเตอร์แบบกรงกระรอกสองตัว
ตามแผนภาพในรูป 1, a, การเริ่มต้นของมอเตอร์หนึ่งตัวไม่รวมความเป็นไปได้ในการเปิดอีกอันซึ่งจัดทำโดยหน้าสัมผัสเสริม K1 และ K2 ซึ่งเปิดขึ้นเมื่อคอนแทคเตอร์ของมอเตอร์อีกตัวทำงาน สามารถใช้วงจรเดียวกันเพื่อควบคุมมอเตอร์แต่ละตัวจากระยะไกลโดยไม่ปิดกั้น ในการดำเนินการนี้ ต้องตั้งสวิตช์ SM สองตำแหน่งให้อยู่ในตำแหน่งที่ถูกต้องเมื่อปิดหน้าสัมผัสทั้งคู่ 1 และ 2 โดยผ่านหน้าสัมผัสเสริม K1 และ K2
ตามแผนภาพในรูป 1, b, เครื่องยนต์ตัวแรก (ไม่แสดงในรูป) เปิดโดยกดปุ่มสตาร์ท SB1 เครื่องยนต์ที่สองจะเปิดโดยอัตโนมัติ แต่เครื่องยนต์ตัวที่สองไม่สามารถสตาร์ทได้เมื่อเครื่องยนต์ตัวแรกไม่ทำงานการเปิดเครื่องยนต์เครื่องหนึ่งทำให้เครื่องยนต์อีกเครื่องหนึ่งดับทันที ในการทำงานแบบอัตโนมัติ สวิตช์ SM จะถูกตั้งค่าไปที่ตำแหน่งด้านซ้าย โดยที่หน้าสัมผัส 1 และ 3 ปิดอยู่ และในการควบคุมแยกต่างหาก สวิตช์จะถูกตั้งค่าไปยังตำแหน่งที่ถูกต้อง เมื่อหน้าสัมผัส 2 และ 4 ปิดอยู่
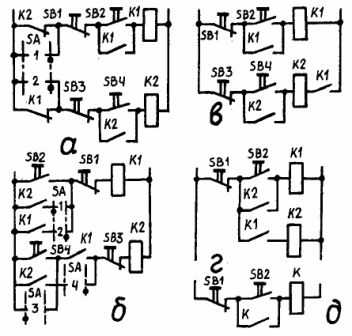
รูปที่. 1. โครงร่างการปิดกั้นของมอเตอร์แบบอะซิงโครนัสสองตัว: a - ข้อยกเว้นการปิดกั้น; b และ c — ขึ้นอยู่กับการปิดกั้น; คนขับ — เมื่อสองเครื่องยนต์ทำงานร่วมกัน
ตามแผนภาพในรูป 1 มอเตอร์จะเปิดทีละตัว: อันดับแรก มอเตอร์ตัวแรกที่มีปุ่ม SB1 จากนั้นมอเตอร์ตัวที่สองที่มีปุ่ม SB2 เป็นไปได้ที่เครื่องยนต์ตัวแรกจะทำงานแยกกัน แต่เครื่องยนต์ตัวที่สองสามารถทำงานร่วมกับเครื่องยนต์ตัวแรกได้เท่านั้น แผนการควบคุมการสตาร์ทจะง่ายขึ้นอย่างมากหากต้องใช้งานมอเตอร์ร่วมกันเท่านั้น
ตามแผนภาพในรูป 1, d, มีให้โดยคอนแทคสองตัวและปุ่มเริ่มต้นทั่วไปและในรูปแบบของรูปที่ 1, d — จากคอนแทคทั่วไป ในรูปแบบทั้งหมดข้างต้น มอเตอร์จะหยุดทำงานโดยใช้ปุ่ม SB ที่เกี่ยวข้อง
ไม่ว่ารูปแบบการควบคุมเครื่องยนต์จะประกอบขึ้นอย่างมีเหตุผลเพียงใด จะต้องคำนึงถึงความเป็นไปได้ของการทำงานผิดพลาดในการทำงานของแต่ละองค์ประกอบด้วย ความน่าเชื่อถือในการทำงานไม่เพียงขึ้นอยู่กับคุณภาพของอุปกรณ์และการติดตั้งเท่านั้น แต่ยังรวมถึงการสร้างวงจรควบคุมด้วย ดังนั้นจึงจำเป็นต้องจัดเตรียมสัญญาณเตือนประเภทต่างๆ สำหรับโหมดการทำงานของวงจรและหลีกเลี่ยงโหมดฉุกเฉิน เพื่อไม่รวมการทำงานต่อเนื่องที่เกิดขึ้นเองหลังจากการคืนค่าแรงดันไฟฟ้าโดยไม่ต้องต่อวงจรใหม่ ผู้ปฏิบัติงานจะให้ข้อมูลสัญญาณ (รูปที่ 2) แม้จะมีความเรียบง่ายของเวอร์ชั่นของรูปที่2 อา มันอาจส่งสัญญาณเตือนที่ผิดพลาดเมื่อหลอดไฟดับ
ตัวเลือกที่น่าเชื่อถือกว่าคือรูปที่ 2, b เนื่องจากหากหลอดใดหลอดหนึ่งในสองหลอดดับก็จะไม่ให้ข้อมูลเท็จ หากวงจรมีหน้าสัมผัสฟรี 2 มีความน่าเชื่อถือมากขึ้น สัญญาณการกู้คืนแรงดันไฟฟ้าในที่ที่มีรีเลย์แรงดันไฟฟ้า KV สามารถกำหนดได้ตามรูปแบบของรูปที่ 2, d. หลังจากถอดแรงดันไฟฟ้าออกแล้วการรีสตาร์ทจะดำเนินการโดยปุ่มทริกเกอร์ SB วงจรเปิดของรีเลย์หรือขดลวดคอนแทคไม่ควรเป็นสาเหตุของการทำงานที่ไม่ถูกต้อง ดังนั้นโดยปกติแล้วหน้าสัมผัสเปิดที่ปิดเมื่อวงจรคอยล์เปิดไม่ควรรวมอยู่ในวงจรควบคุม
ในวงจรของมะเดื่อ 2, e ใช้รีเลย์ตรวจสอบยานอวกาศของกระแสในขดลวดของหน่วยวิกฤติซึ่งเชื่อมต่อแบบขนานกับขดลวดของคอนแทค K สัญญาณเปิดในขดลวด K จะแสดงโดยหลอดไฟ HL หากกระดองของคอนแทค K ติดอยู่เมื่อแรงดันไฟฟ้าถูกลบออก สัญญาณที่คอนแทคเตอร์ยังคงเปิดอยู่นั้นมาจากการส่องสว่างของหลอดไฟ HL1
วงจรสัญญาณเตือนแบบเสียงหนึ่งตัวแปรแสดงในรูปที่ 2, e. โครงร่างนี้ใช้เพื่อตรวจสอบการทำงานที่ถูกต้องของเครื่องยนต์สี่ตัว เมื่อสตาร์ทเครื่องยนต์ทั้งสี่แล้ว สัญญาณเตือนในวงจรนี้จะเตรียมพร้อมสำหรับการเปิดใช้งานโดยอัตโนมัติ ในกรณีนี้ หน้าสัมผัสปิดของมอเตอร์ตัวที่สี่ K4 จะเปิดรีเลย์เพื่อเตรียมสัญญาณเสียง KV และหน้าสัมผัสเปิดในส่วน a เปิดอยู่ ในกรณีนี้ หน้าสัมผัสล็อคตัวเองและบล็อกของรีเลย์ KV จะปิด
ในกรณีที่เกิดการโอเวอร์โหลด เช่น ของมอเตอร์ตัวใดตัวหนึ่งในส่วน ab หน้าสัมผัสที่เปิดอยู่ตัวใดตัวหนึ่งจะปิดลง และสัญญาณเตือน HA จะดังขึ้นทันที ในการถอดออดออก ให้กดปุ่ม SB ที่ต่ออนุกรมกับ HA ซึ่งจะเป็นการเปิดวงจรของรีเลย์ KV และหน้าสัมผัส KV เมื่อกดปุ่ม SB1 มอเตอร์จะหยุดโดยอัตโนมัติและรีเลย์หยุดอัตโนมัติ KH จะทำงาน
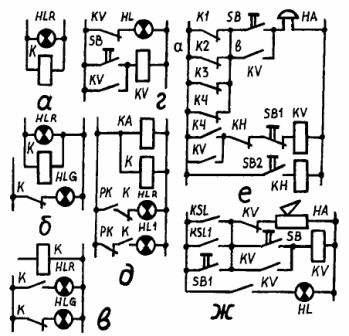
ข้าว. 2. รูปแบบการส่งสัญญาณ: a, b, c - ตัวอย่างของการส่งสัญญาณข้อมูล d และ d — พร้อมรีเลย์แรงดันและรีเลย์ควบคุม ฉ, ก — ฉุกเฉิน
รีเลย์ KH หน้าสัมผัสแบบเปิดจะปิดวงจรแหล่งจ่ายไฟไปยังคอยล์ของคอนแทค K1 K2, K3 และ K4 (คอนแทคเลนส์ที่ไม่แสดงในแผนภาพ) และด้วยหน้าสัมผัส KN อื่นจะปิดรีเลย์ KV ซึ่งจะปิดเสียงออด HA หากต้องการตรวจสอบเสียงบี๊บ ให้กดปุ่ม SB
เพื่อควบคุมระดับบนและล่างของขี้เลื่อยในถังผลิตชิปบอร์ด สามารถใช้เสียงเตือนได้ ดังแสดงในรูปที่ 2, ก. เมื่อชิปไปถึงระดับบนของฮอปเปอร์ รีเลย์ KSL จะเปิดขึ้น และหน้าสัมผัสปิดจะเปิดเสียงบี๊บ HA เมื่อชิปในฮอปเปอร์ต่ำกว่าระดับที่ตั้งไว้ หน้าสัมผัสรีเลย์ระดับต่ำ RSL1 จะปิดและส่งเสียงกริ่ง
เมื่อกดปุ่ม SB เสียงเตือนจะถูกลบออก ปุ่ม SB จะเปิดรีเลย์เพื่อลบสัญญาณ KV และหน้าสัมผัสที่เปิดอยู่จะปิดการส่งสัญญาณ HA รีเลย์ KV จะยังคงจ่ายไฟผ่านหน้าสัมผัสล็อคตัวเองจนกว่าแรงดันควบคุมจะถูกลบออก เมื่อกดปุ่ม SB1 จะเป็นการตรวจสอบการทำงานของเสียงเตือน
ในรูป3 แสดงไดอะแกรมของการส่งสัญญาณไฟฟ้าของพารามิเตอร์กระบวนการสองตัว
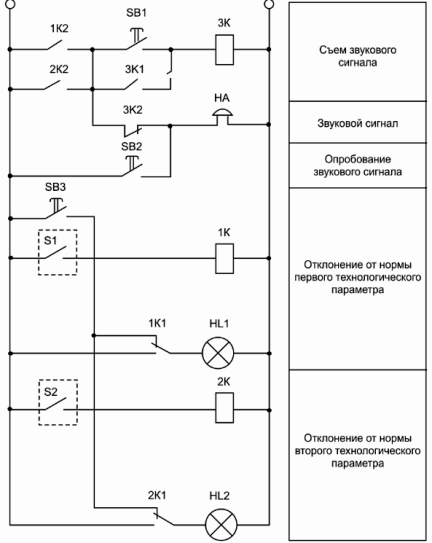
ข้าว. 3. วงจรสัญญาณเตือนภัย
ในกรณีที่มีการเบี่ยงเบนจากบรรทัดฐานของหนึ่งในนั้น เช่น อันแรก ให้ปิดกระบวนการติดต่อ S1 ซึ่งอยู่ในอุปกรณ์วัดหรืออุปกรณ์ส่งสัญญาณที่เกี่ยวข้อง ซึ่งรวมถึงรีเลย์ 1K ซึ่งมีหน้าสัมผัสสวิตช์ 1K1 เปิดไฟสัญญาณ HL1 และปิดจากปุ่มทดสอบสัญญาณเตือน SB3
ในขณะเดียวกันหน้าสัมผัสปิด 1K2 ของรีเลย์ 1K ผ่านหน้าสัมผัสเปิด 3K2 ของรีเลย์ที่ตัดการเชื่อมต่อ 3K จะเปิดกระดิ่ง กระดิ่งเปิดใช้งานโดยปุ่มปลดสัญญาณเตือน SB1 เมื่อกด รีเลย์ 3K ผ่านหน้าสัมผัส 3X7 จะล็อคเอง กระดิ่งจะตัดการเชื่อมต่อจากหน้าสัมผัสที่เปิดอยู่
หากอยู่ในสถานะนี้ของวงจร หน้าสัมผัสของกระบวนการที่สอง S2 ปิดลง จากนั้นเมื่อนำออดออก เฉพาะไฟสัญญาณ HL2 จะสว่างขึ้นและออดจะไม่ดัง วงจรจะกลับสู่สถานะเดิมหลังจากเปิดหน้าสัมผัสกระบวนการทั้งสอง S1 และ S2 ทำให้รีเลย์ทั้งหมดหยุดทำงาน ปุ่ม SB2 และ SB3 มีไว้สำหรับทดสอบกริ่งและไฟสัญญาณ