วงจรควบคุมและพลังงานสำหรับการยกแม่เหล็กไฟฟ้า
 การยกแม่เหล็กไฟฟ้ามีความเหนี่ยวนำสูงดังนั้นสำหรับการปลดปล่อยโหลดอย่างรวดเร็วและสมบูรณ์รวมถึงการ จำกัด แรงดันไฟฟ้าเกินให้มีค่าไม่เกิน 2 kV จึงใช้วงจรพิเศษและอุปกรณ์ควบคุม แม่เหล็กไฟฟ้ารับแรงดันไฟฟ้าจากเครื่องกำเนิดมอเตอร์หรือวงจรเรียงกระแส แผนผังการควบคุมเมื่อแม่เหล็กไฟฟ้าขับเคลื่อนโดยเครือข่ายกระแสตรงจะแสดงในรูปที่ 1, ก และ ข
การยกแม่เหล็กไฟฟ้ามีความเหนี่ยวนำสูงดังนั้นสำหรับการปลดปล่อยโหลดอย่างรวดเร็วและสมบูรณ์รวมถึงการ จำกัด แรงดันไฟฟ้าเกินให้มีค่าไม่เกิน 2 kV จึงใช้วงจรพิเศษและอุปกรณ์ควบคุม แม่เหล็กไฟฟ้ารับแรงดันไฟฟ้าจากเครื่องกำเนิดมอเตอร์หรือวงจรเรียงกระแส แผนผังการควบคุมเมื่อแม่เหล็กไฟฟ้าขับเคลื่อนโดยเครือข่ายกระแสตรงจะแสดงในรูปที่ 1, ก และ ข
ควบคุม ยกแม่เหล็กไฟฟ้า ตามรูปแบบที่ระบุจะดำเนินการดังต่อไปนี้ เมื่อคอนโทรลเลอร์ K เปิดอยู่ แรงดันไฟฟ้าจะถูกส่งไปยังคอนแทคแม่เหล็ก B ซึ่งเป็นหน้าสัมผัสปิดที่เชื่อมต่อแม่เหล็กไฟฟ้ากับเครือข่าย ในกรณีนี้ กระแสที่ระบุจะไหลผ่านขดลวด M ของแม่เหล็กไฟฟ้า และความต้านทานการคายประจุที่เชื่อมต่อแบบขนาน (P1 — P4, P4 — PZ และ PZ — P2) จะไหลไปรอบ ๆ ด้วยค่ากระแสที่ต่ำกว่า คอนแทคเตอร์คอยล์ H ที่เชื่อมต่อระหว่างจุด 6 และ 7 ไม่ทำงานเนื่องจากมีหน้าสัมผัสเสริมแบบเปิดที่เชื่อมต่อแบบอนุกรม B เปิดเมื่อคอนแทคเตอร์ B เปิดอยู่
เมื่อผู้ควบคุมเค.ปิดอยู่, หน้าสัมผัสปิดของคอนแทค B เปิดอยู่, แม่เหล็กไฟฟ้าจะถูกยกเลิกพลังงานชั่วขณะและสลับเป็นขั้วกลับโดยอัตโนมัติ และหลังจากที่โหลดลดลง แม่เหล็กไฟฟ้าจะถูกตัดการเชื่อมต่อจากแหล่งพลังงานในที่สุด การรวมแม่เหล็กไฟฟ้านี้ทำให้การล้างอำนาจแม่เหล็กของโหลดลดลงอย่างรวดเร็ว
การดำเนินการอัตโนมัติเมื่อปิดแม่เหล็กไฟฟ้านั้นส่วนใหญ่มาจากการทำงานของคอนแทคล้างอำนาจแม่เหล็ก H แรงดันไฟฟ้าที่ขั้วของขดลวดของคอนแทค H ถูกกำหนดโดยแรงดันตกในส่วนความต้านทาน 6 — P4 และ P4—7 . เมื่อปิดแม่เหล็กไฟฟ้ากระแสจะไม่หายไปในทันที แต่จะถูกปิดโดยวงจรต้านทานการคายประจุ ความต้านทานของส่วนที่ 6 — P4 และ P4—7 ถูกเลือกในลักษณะที่หลังจากปิดตัวควบคุม K และปิดหน้าสัมผัสเปิด B แล้ว คอนแทค H จะเปิดขึ้น
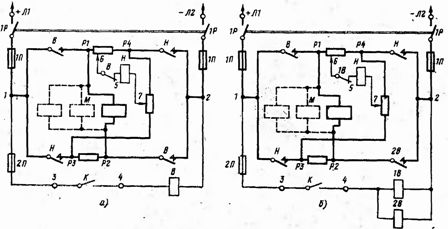
ข้าว. 1. แผนผังการควบคุมของตัวควบคุมแม่เหล็ก PMS 50 (a) และ PMS 150 (b) สำหรับการยกแม่เหล็กไฟฟ้า: V หรือ 1V, 2V-bipolar magnetizing contactor หรือสอง unipolar; H — คอนแทคล้างอำนาจแม่เหล็กสองขั้ว; 1P — สวิตช์; 1P, 2P - ฟิวส์ของวงจรไฟฟ้าและวงจรควบคุม K — ตัวควบคุมคำสั่ง ม — แม่เหล็กไฟฟ้า; ตัวต้านทานดิสชาร์จ P1-P4, P4-P3 และ P3-P2
หลังจากเปิดคอนแทค H หน้าสัมผัสพลังงานจะปิดและแม่เหล็กไฟฟ้าเชื่อมต่อกับเครือข่าย ในกรณีนี้ ทิศทางของกระแสในขดลวดแม่เหล็กไฟฟ้าและความต้านทาน 6-P4 ที่เชื่อมต่อแบบอนุกรมกับขดลวดจะเปลี่ยนไปตรงกันข้ามเมื่อเวลาผ่านไป การเปลี่ยนแปลงทิศทางของกระแสในส่วนของความต้านทาน 6 — P4 เกิดขึ้นพร้อมกับการลดลงเบื้องต้นของกระแสไฟตรงก่อนหน้าให้เป็นศูนย์ที่กระแสศูนย์ในส่วนที่ 6 — P4 คอนแทคเตอร์ H จะยังคงเปิดอยู่เนื่องจากแรงดันตกในส่วน P4—7 เพียงพอสำหรับสิ่งนี้ (ในส่วนที่ 6 — P4 แรงดันตกเป็นศูนย์)
เมื่อทิศทางของกระแสเปลี่ยนไปในส่วนที่ 6 — P4 คอนแทค H จะถูกปิดเนื่องจากขดลวดของมันเชื่อมต่อกับความแตกต่างของแรงดันตกในส่วนที่ 6 — P4 และ P4 — 7 การหยุดชะงักของคอนแทค H เกิดขึ้นเมื่อกระแสล้างอำนาจแม่เหล็กถึงค่าเท่ากับ 10-20% ของกระแสการทำงานของคอยล์เย็นของแม่เหล็กไฟฟ้านั่นคือ จริง ๆ แล้วหลังจากการล้างอำนาจแม่เหล็กและการสูญเสียโหลด
เมื่อปิดแล้ว คอนแทคเตอร์ H จะตัดการเชื่อมต่อขดลวดโซลินอยด์ออกจากกริด ซึ่งยังคงปิดอยู่ที่ความต้านทานการคายประจุ ทำให้ง่ายต่อการแยกส่วนโค้งออกจากคอนแทคและลดแรงดันไฟฟ้าเกิน เพิ่มอายุการใช้งานของฉนวนคอยล์ หน้าสัมผัสเสริมการเปิดของคอนแทค B (ในวงจรคอยล์ของคอนแทค H) ป้องกันการทำงานพร้อมกันของคอนแทคทั้งสอง
วงจรช่วยให้คุณปรับเวลาการล้างอำนาจแม่เหล็กซึ่งทำได้โดยการเลื่อนแคลมป์ตัวต้านทาน นั่นคือโดยการเปลี่ยนค่าความต้านทานของส่วนที่ 6 — P4 และ P4—7 ในขณะเดียวกัน เวลานี้จะถูกปรับโดยอัตโนมัติตามประเภทของน้ำหนักบรรทุกที่กำลังยก ด้วยน้ำหนักที่มากขึ้น ค่าการนำไฟฟ้าของสนามแม่เหล็กก็จะยิ่งมากขึ้น ซึ่งนำไปสู่การเพิ่มขึ้นของค่าคงที่เวลาของแม่เหล็กไฟฟ้า และทำให้เวลาในการล้างอำนาจแม่เหล็กเพิ่มขึ้น ด้วยน้ำหนักที่เบา เวลาในการล้างอำนาจแม่เหล็กจึงลดลง
ตามรูปแบบที่อธิบายไว้จะมีการผลิตตัวควบคุมแม่เหล็กประเภท PMS 50, PMS 150, PMS50T และ PMS 150T
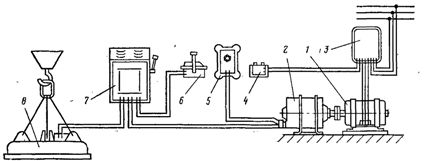
ข้าว. 2.วงจรไฟฟ้าของแม่เหล็กไฟฟ้ายกของเครนในที่ที่มีเครือข่ายกระแสสลับ: 1 — มอเตอร์ไฟฟ้าแบบอะซิงโครนัส; 2 — เครื่องกำเนิดกระแสไฟฟ้าเพียงพอ 3 — สตาร์ทแม่เหล็ก; 4 — ปุ่มควบคุม; 5 — เครื่องควบคุมการกระตุ้น; 6 — ตัวควบคุมคำสั่ง; 7 — ตัวควบคุมแม่เหล็ก 8 — ยกแม่เหล็กไฟฟ้า
เครนส่วนใหญ่ที่มีโซลินอยด์ในการยกนั้นใช้ไฟหลักจากแหล่งจ่ายไฟฟ้ากระแสสลับ ดังนั้นจึงต้องใช้เครื่องกำเนิดมอเตอร์หรือวงจรเรียงกระแสสำหรับโซลินอยด์ไฟฟ้ากระแสตรง ในรูป 2 แสดงวงจรจ่ายของแม่เหล็กไฟฟ้ายกจากมอเตอร์เครื่องกำเนิดไฟฟ้า เครื่องกำเนิดไฟฟ้าป้องกันกระแสลัดวงจร รีเลย์แรงดันไฟฟ้าประเภท REV 84 ดำเนินการในสายเคเบิลที่ป้อนแม่เหล็กไฟฟ้า
การเปลี่ยนโรตารีคอนเวอร์เตอร์ด้วยสแตติกคอนเวอร์เตอร์ช่วยลดต้นทุนทุน น้ำหนักไฟฟ้า และต้นทุนการดำเนินงาน คอนโทรลเลอร์แม่เหล็กชนิด PSM 80 ร่วมกับคอนโทรลเลอร์ควบคุม KP 1818 selsyn ทำให้สามารถปรับความจุโหลดได้ สิ่งนี้มีความสำคัญอย่างยิ่งในงานที่เกี่ยวข้องกับการตกแต่ง การคัดแยก การทำเครื่องหมาย และการขนส่งแผ่นโลหะในโรงงานโลหะวิทยา เช่นเดียวกับในคลังสินค้าและฐานต่างๆ
ในรูป 3 แสดงไดอะแกรมของตัวควบคุมแม่เหล็ก PSM 80 พร้อมตัวแปลงที่ควบคุมแบบคงที่ ตัวแปลงถูกสร้างขึ้นตามวงจรคลื่นเต็มคลื่นสามเฟสแบบไม่มีหม้อแปลงพร้อมไทริสเตอร์หนึ่งตัวและไดโอดดิสชาร์จ การควบคุมปัจจุบันดำเนินการโดยการเปลี่ยนแรงดันขาออกของตัวแปลงโดยการเปลี่ยนมุมเปิดของไทริสเตอร์ มุมเปิดของไทริสเตอร์ขึ้นอยู่กับสัญญาณอ้างอิง ซึ่งปรับได้ไม่จำกัดในช่วงกว้างโดยตัวควบคุมซิงโครนัส
อุปทาน ฉันใช้หม้อแปลงสามขดลวดขดลวด 36 V ใช้เพื่อจ่ายไฟให้กับองค์ประกอบรีเลย์, แรงดันกระตุ้นเซลซินของคอนโทรลเลอร์จะถูกลบออกจากขดลวด 115 V แหล่งจ่ายไฟประกอบด้วยวงจรเรียงกระแสเฟสเดียว D7-D10 ที่เอาต์พุตซึ่งมีไดโอดซีเนอร์ St1-St3 และติดตั้งตัวต้านทานบัลลาสต์ R2
แรงดันไฟฟ้าที่เสถียรขององค์ประกอบรีเลย์ 16.4 V จะถูกลบออกโดยซีเนอร์ไดโอด St2 และ St3 ในกรณีนี้ กระแสไปข้างหน้าจะไหลผ่านตัวต้านทาน R3 และฐานของทรานซิสเตอร์ T1 ซึ่งจะเปิดทรานซิสเตอร์ จากซีเนอร์ไดโอด St1 จะใช้อคติเชิงลบ (-5.6 V) ที่ฐานของทรานซิสเตอร์ T2 เพื่อปิดเมื่อทรานซิสเตอร์ T1 เปิดอยู่
งานบล็อก II ประกอบด้วย เซลซิน่ารวมอยู่ในคอนโทรลเลอร์ selsyny และวงจรเรียงกระแสเฟสเดียว D11-D14 แรงดันไฟตรงของโรเตอร์ selsyn ถูกนำไปใช้กับอินพุตของบริดจ์ ซึ่งจะเปลี่ยนไปเมื่อมันหมุนเมื่อเทียบกับสเตเตอร์ โรเตอร์หมุนโดยที่จับ CCK ที่เอาต์พุตของสะพานจะได้รับการเปลี่ยนแปลงแรงดันไฟฟ้าที่แก้ไขแล้วตามสัดส่วนของกระแสเอาต์พุตที่ไหลเมื่อทรานซิสเตอร์ T1 เปิดผ่านฐานและตัวต้านทาน R6 ก็จะเปลี่ยนไปเช่นกัน องค์ประกอบรีเลย์ประกอบขึ้นบนทรานซิสเตอร์ชนิด p-p-p สองตัว
เพื่อให้โหมดการควบคุมเฟสในวงจรมีแหล่งจ่ายแรงดันฟันเลื่อยซึ่งเป็นวงจร RC ซึ่งไทริสเตอร์ T ปัดออก ในขณะที่ไทริสเตอร์ปิด ตัวเก็บประจุ C4 C5 จะถูกชาร์จ เมื่อไทริสเตอร์ T เปิดขึ้น ตัวเก็บประจุจะคายประจุอย่างรวดเร็ว กระแสเลื่อยไหลผ่านตัวต้านทาน R13 และฐานของทรานซิสเตอร์ T1
ตัวควบคุม selsinki มีตำแหน่งคงที่หนึ่งตำแหน่ง (ศูนย์) และให้สภาวะการเบรกที่ตำแหน่งตรงกลางของที่จับควบคุมในกรณีนี้ ค่าหนึ่งของกระแสไฟฟ้าจะสอดคล้องกับแต่ละตำแหน่งของโรเตอร์ selsyn ในตำแหน่งควบคุมวงจรจะรักษาค่าเฉลี่ยของกระแสแม่เหล็กไฟฟ้าด้วยความแม่นยำเพียงพอเมื่อขดลวดถูกทำให้ร้อน ความคลาดเคลื่อนของกระแสสำหรับคอยล์เย็นและคอยล์ร้อนไม่เกิน 10% และค่าสูงสุดของกระแสสำหรับคอยล์ร้อนไม่เกินค่าแคตตาล็อกของกระแสมากกว่า 5 เมื่อแรงดันไฟฟ้าของแหล่งจ่ายมีความผันผวนในช่วง (0.85 — 1.05) อ๊ะ การเปลี่ยนแปลงของกระแสแม่เหล็กไฟฟ้าไม่เกินขีดจำกัดที่ระบุ
วงจรสวิตชิ่งด้าน DC ประกอบด้วย:
• คอนแทคเตอร์สองขั้วสำหรับการสลับแม่เหล็กไฟฟ้า KB โดยตรงและย้อนกลับ CV;
• รีเลย์สองเวลา РВ และ РП เพื่อควบคุมกระบวนการล้างอำนาจแม่เหล็กของแม่เหล็กไฟฟ้าระหว่างการปิดเครื่อง
• ตัวต้านทานดิสชาร์จ R19 — R22 เพื่อจำกัดแรงดันไฟเกินที่เกิดขึ้นเมื่อปิดแม่เหล็กไฟฟ้า
• ไดโอด D4 เพื่อลดกำลังของตัวต้านทานดิสชาร์จ
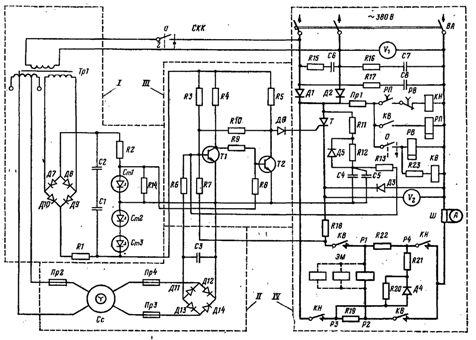
ข้าว. 3. โครงการปรับความสามารถในการรับน้ำหนักของแม่เหล็กไฟฟ้า: I - บล็อกแหล่งจ่ายไฟ: II - บล็อกงาน; III - องค์ประกอบรีเลย์ VI — วงจรไฟฟ้า; R1 — R25 — ตัวต้านทาน; C1 — C8 — ตัวเก็บประจุ, W — shunt; VA — สวิตช์อัตโนมัติ D1 -D16 — ไดโอด; KV และ KN — คอนแทคเตอร์ที่มีขดลวดแม่เหล็กไฟฟ้าโดยตรงและย้อนกลับ (การทำให้เป็นแม่เหล็กและการล้างอำนาจแม่เหล็ก); РВ และ РП - รีเลย์เวลาสำหรับควบคุมกระบวนการล้างอำนาจแม่เหล็ก Pr1 - Pr4 - ฟิวส์ Сс — ตัวควบคุม selsyn; St1 -St3 — ซีเนอร์ไดโอด; T - ไทริสเตอร์: T1, T2 - ทรานซิสเตอร์, TP1 - หม้อแปลง; EM — การยกแม่เหล็กไฟฟ้า SKK — คอนโทรลเลอร์ควบคุม selsyn
หากสายป้อนแม่เหล็กไฟฟ้าขาด จำเป็นต้องปิดสวิตช์หรือเบรกเกอร์ของตัวควบคุมแม่เหล็ก ห้ามมิให้อยู่ใต้ faucet ด้วยแม่เหล็กไฟฟ้าที่ใช้งานได้ การตรวจสอบและเปลี่ยนอุปกรณ์จะต้องดำเนินการโดยปิดสวิตช์หลักของ faucet
อุปกรณ์ไฟฟ้าทั้งหมดต้องต่อสายดินอย่างแน่นหนา ให้ความสนใจเป็นพิเศษกับการต่อลงดินของแม่เหล็กไฟฟ้า สลักเกลียวกราวด์ในกล่องโซลินอยด์เชื่อมต่อกับสลักเกลียวกราวด์ของตู้ควบคุมแม่เหล็ก การเชื่อมต่อทำจากหนึ่งในแกนของสายไฟสามแกน มิฉะนั้น การทำงานของอุปกรณ์ไฟฟ้าควรเป็นไปตามกฎความปลอดภัยทั่วไปสำหรับการบำรุงรักษาการติดตั้งระบบไฟฟ้า