เค้าโครงของสายพานลำเลียงที่มีสามท่อลำเลียง
 เมื่อต้องจัดการกลุ่มสายพานลำเลียงที่ให้บริการเทคโนโลยีที่ซับซ้อน จำเป็นต้องแนะนำอินเตอร์ล็อกต่างๆ นอกจากนี้ การส่งสัญญาณสถานะของกลไกมีความสำคัญมากในการออกแบบวงจรควบคุม ซึ่งส่วนใหญ่มักใช้โดยใช้วงจรช่วยจำน้ำหนักเบาซึ่งอยู่บนแผงควบคุมของผู้ปฏิบัติงาน
เมื่อต้องจัดการกลุ่มสายพานลำเลียงที่ให้บริการเทคโนโลยีที่ซับซ้อน จำเป็นต้องแนะนำอินเตอร์ล็อกต่างๆ นอกจากนี้ การส่งสัญญาณสถานะของกลไกมีความสำคัญมากในการออกแบบวงจรควบคุม ซึ่งส่วนใหญ่มักใช้โดยใช้วงจรช่วยจำน้ำหนักเบาซึ่งอยู่บนแผงควบคุมของผู้ปฏิบัติงาน
ในรูป 1 แสดงเส้นลำเลียงที่ประกอบด้วยสายพานต่อเนื่องกันสามตัว ไดรฟ์ไฟฟ้าของสายพานลำเลียงนั้นมาจากมอเตอร์แบบอะซิงโครนัสโรเตอร์กรงกระรอกซึ่งเป็นวงจรควบคุมที่แสดงในรูปเดียวกัน
วงจรควบคุมของมอเตอร์ไฟฟ้าของกลุ่มสายพานลำเลียงกำหนด: ระยะเวลาที่จำเป็นในการเริ่มสายพานลำเลียงในทิศทางตรงกันข้ามกับการไหลของโหลด สิ่งนี้จะช่วยขจัดอันตรายจากการอุดตันของจุดโอเวอร์โหลด ดังนั้น การเริ่มต้นของสายพานลำเลียงที่ตามมาแต่ละอัน (ในทิศทางที่สวนทางกับการไหลของสินค้า) จะได้รับอนุญาตก็ต่อเมื่อตัวรับน้ำหนักของสายพานลำเลียงก่อนหน้าถูกเร่งอย่างเต็มที่เท่านั้น
การปิดกั้นนี้ทำได้โดยใช้รีเลย์ความเร็วที่ควบคุมการเคลื่อนที่ของชิ้นส่วนฉุด ลำดับที่จำเป็นในการหยุดสายพานลำเลียงในทิศทางการไหลของโหลด
การประสานดังกล่าวจะต้องจัดให้มีขึ้นเพื่อให้แน่ใจว่า ในกรณีการหยุดฉุกเฉินของหนึ่งในสายพานลำเลียง การหยุดของสายพานทั้งหมดจากจุดโหลดไปยังสายพานที่หยุด และสายพานที่เหลือจะต้องทำงานต่อไปเพื่อปล่อยการลากจูง ร่างกายจากภาระ; การควบคุมเวลาเริ่มต้นของสายพานลำเลียง
การสตาร์ทเป็นเวลานานบ่งชี้ถึงการทำงานผิดปกติของมอเตอร์ไฟฟ้าหรือระบบควบคุม หรือการเลื่อนหลุดของสายพานบนดรัมขับเคลื่อน ซึ่งเป็นสิ่งที่ยอมรับไม่ได้
วงจรควบคุมต้องให้ความเป็นไปได้ในการหยุดสายพานลำเลียงจากจุดใดก็ได้ การหยุดฉุกเฉินของสายพานลำเลียงและวงจรที่ตามมาทั้งหมดในทิศทางของการเริ่มต้นในกรณี: ยืดเวลาเริ่มต้นของสายพานลำเลียง การลดความเร็วของสายพานลำเลียง การแตกขององค์ประกอบการลาก, ไม่สามารถยอมรับได้เกินความเร็วในการเคลื่อนที่ขององค์ประกอบการลาก, การบรรทุกเกินพิกัดของมอเตอร์ไฟฟ้าของสายพานลำเลียง, ความร้อนสูงเกินไปของแบริ่งของดรัมขับ, การก่อตัวของการอุดตันในสถานที่ที่มีการบรรทุกเกินพิกัด, การลดลงของสายพานลำเลียง ความปลอดภัยภายในของวงจรควบคุมและจำนวนคอร์ขั้นต่ำ
ต้องจัดให้มีการส่งสัญญาณประเภทต่อไปนี้ในรูปแบบการควบคุมของระบบขนส่งแบบไหล: คำเตือน, ฉุกเฉิน, สำหรับจำนวนของสายพานที่เชื่อมต่อ ฯลฯ
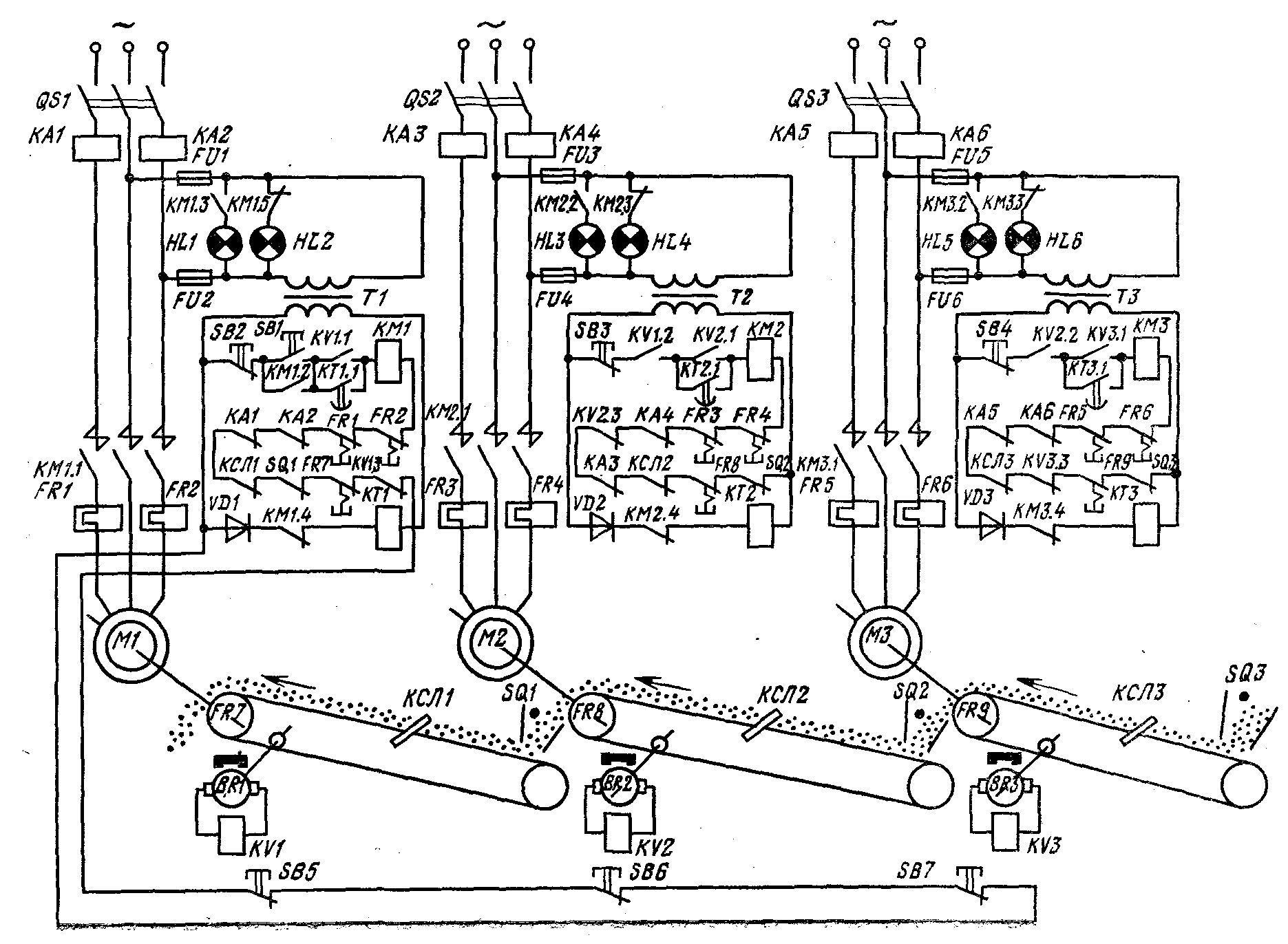
ข้าว. 1. วงจรควบคุมการขับเคลื่อนด้วยไฟฟ้าของสายพานลำเลียง 3 ชุด (ระบบลำเลียงแบบไหล)
ตามข้อกำหนดข้างต้น การเริ่มต้นของสายพานลำเลียงจะดำเนินการตามลำดับต่อไปนี้ขั้นแรก ให้สตาร์ทมอเตอร์ M1 โดยกดปุ่ม SB1 ในเวลาเดียวกันคอนแทคเตอร์ KM1 รับพลังงานและปิดสายสัมผัส KM1.1 ในวงจรสเตเตอร์ของมอเตอร์แบบอะซิงโครนัส M1 เมื่อกระตุ้น มอเตอร์เริ่มหมุน ขับสายพานลำเลียง
ในเวลาเดียวกันหน้าสัมผัสเสริมจะปิด: KM1.2 ซึ่งข้ามปุ่ม SB1 และ KM1.3 ซึ่งเปิดไฟสัญญาณ HL1 ซึ่งระบุสถานะการทำงานของมอเตอร์ M1 หน้าสัมผัสการเปิด KM1.4 จะปิดการถ่ายทอดเวลา KT1 ซึ่งนับเวลาที่ต้องใช้ในการเร่งมอเตอร์ไปที่ความเร็วสูงสุด
 เมื่อสายพานลำเลียงเคลื่อนที่ เพลาของ tachogenerator ของรีเลย์ความเร็ว KV1 จะหมุน เมื่อสายพานลำเลียงถึงความเร็วสูงสุด รีเลย์ KV1 จะให้สัญญาณเพื่อปิดหน้าสัมผัส: KV1.1 ในวงจร โดยผ่านหน้าสัมผัส KT1.1 และตัวที่สอง - KV1.2 ในวงจรควบคุมของสายพานลำเลียงถัดไป
เมื่อสายพานลำเลียงเคลื่อนที่ เพลาของ tachogenerator ของรีเลย์ความเร็ว KV1 จะหมุน เมื่อสายพานลำเลียงถึงความเร็วสูงสุด รีเลย์ KV1 จะให้สัญญาณเพื่อปิดหน้าสัมผัส: KV1.1 ในวงจร โดยผ่านหน้าสัมผัส KT1.1 และตัวที่สอง - KV1.2 ในวงจรควบคุมของสายพานลำเลียงถัดไป
ขั้นตอนปกติของกระบวนการเริ่มต้นถูกควบคุมโดยรีเลย์เวลา KT1 หลังจากพ้นเวลาที่ตั้งไว้ รีเลย์ KT1 จะปล่อยกระดองและทำให้หน้าสัมผัส KT1.1 เปิดในวงจรคอนแทค KM1 แม้จะมีการเปิดหน้าสัมผัส KT1.1 แต่คอนแทค KM1 ยังคงรับพลังงานผ่านหน้าสัมผัส KV1.2 ที่ปิดอยู่
หากด้วยเหตุผลบางอย่างที่สายพานไม่ถึงความเร็วสูงสุดในช่วงเวลาที่ต้องเริ่มต้น หน้าสัมผัส KT1.1 จะเปิดก่อนที่หน้าสัมผัส KV1.1 จะปิด และมอเตอร์ M1 จะหยุดเนื่องจากวงจรของคอนแทค KM1 จะเปิดอยู่ .
ความแน่นเกิดจากการที่สายพานเลื่อนไปบนดรัม นี่เป็นโหมดอันตรายที่อาจทำให้เทปติดไฟได้ ดังนั้นวงจรจึงจัดให้มีการเชื่อมต่อที่ปิดโหมดอันตรายนี้ในกรณีของการสตาร์ทมอเตอร์ M1 ตัวแรกตามปกติ จะมีสัญญาณให้เปิดมอเตอร์ M2 ของสายพานลำเลียงที่สอง — หน้าสัมผัส KV1.2 จะปิดลง ขดลวดของคอนแทค KM2 ไหลไปรอบ ๆ ด้วยกระแสและเมื่อกระตุ้นจะปิดหน้าสัมผัส KM2.1 ในวงจรสเตเตอร์ของมอเตอร์ M2 ตัวที่สอง การควบคุมการสตาร์ทเครื่องยนต์ที่สองนั้นดำเนินการในลำดับเดียวกัน

การป้องกันประเภทต่อไปนี้มีให้ในรูปแบบการควบคุมมอเตอร์ไฟฟ้า:
-
จากการโอเวอร์โหลดของมอเตอร์ — รีเลย์ระบายความร้อน FR1 — FR6;
-
จากความร้อนสูงเกินไปของตลับลูกปืนดรัมไดรฟ์ — รีเลย์ระบายความร้อน FR7 — FR9;
-
จากความเร็วเกินของสายพาน — รีเลย์ความเร็ว KV1.3 — KV3.3;
-
จากแถบลงมา — รีเลย์ KSL1 — KSL3;
-
จากการปิดกั้นที่จุดชาร์จ — ผ่านสวิตช์ SQ1 — SQ3
เมื่อมีการกระตุ้นการป้องกันประเภทใดประเภทหนึ่ง ไม่เพียงแต่สายพานลำเลียงที่เกิดอุบัติเหตุจะหยุดทำงานเท่านั้น แต่ยังรวมถึงสิ่งต่อไปนี้ที่ขัดขวางการไหลของโหลดด้วย สายพานที่เหลืออยู่ในทิศทางของการไหลของโหลดยังคงทำงานอยู่
ในวงจรควบคุมจะมีการส่งสัญญาณไฟซึ่งแสดงสถานะของมอเตอร์ไฟฟ้า: ไฟสีเขียว HL2, HL4, HL6 เปิดอยู่ซึ่งระบุสถานะการปิดใช้งานของมอเตอร์, สีแดง HL1, HL3, HL5 — สำหรับสถานะการทำงาน คุณสามารถหยุดสายพานลำเลียงจากจุดใดก็ได้บนรางโดยกดปุ่ม SB5, SB6, SB7 ปุ่มใดปุ่มหนึ่ง