รถเข็นไฟฟ้าพร้อมเครนเหนือศีรษะ
รถเข็นที่มีเครนเหนือศีรษะเป็นองค์ประกอบอิสระของอุปกรณ์ยก และออกแบบมาเพื่อเคลื่อนย้ายสิ่งของภายในช่วงของเครนเหนือศีรษะด้วยความเร็วการเคลื่อนที่ที่กำหนดโดยเทคโนโลยีและความแม่นยำที่จำเป็นในการวางตำแหน่งโหลด ไดรฟ์โบกี้เป็นหนึ่งในองค์ประกอบหลักของอุปกรณ์เครนเหนือศีรษะ
รถเข็นเคลื่อนที่ไปตามรางของเครนเหนือศีรษะ ตัวสะพานเคลื่อนที่ในทิศทางตั้งฉากกับทิศทางการเคลื่อนที่ของเกวียน มีการติดตั้งกลไกการยกบนรถเข็นซึ่งมีตะขอ (หรือแม่เหล็กไฟฟ้า) ซึ่งคุณสามารถเคลื่อนย้ายสิ่งของได้ การเคลื่อนที่ของโบกี้เป็นส่วนสำคัญของวงจรเทคโนโลยีของเครนเหนือศีรษะ (รูปที่ 1)
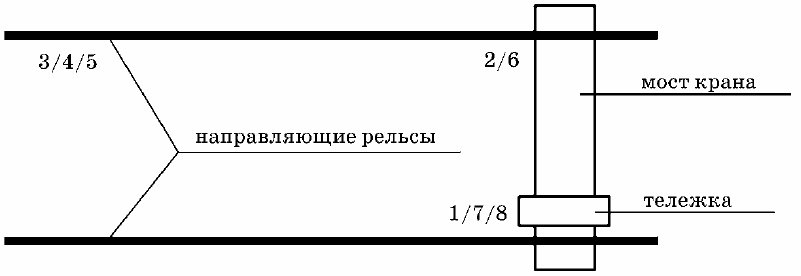
ข้าว. 1. โครงการดำเนินการกับเครนสะพานในรอบการทำงาน
รอบนี้ประกอบด้วยการดำเนินการต่อไปนี้ (ในรูปที่ 1 หมายเลขการดำเนินการแสดงเป็นตัวเลข):
1 — ยกของหนัก;
2 — ย้ายรถเข็นไปยังตำแหน่งที่กำหนด
3 — ย้ายเครนไปยังตำแหน่งที่กำหนดไว้
4 — การลดน้ำหนักของภาระ;
5 — ยกตะขอด้วยน้ำหนักบรรทุก
6 — ย้ายเครนไปยังตำแหน่งเดิม
7 — ย้ายรถเข็นไปยังตำแหน่งเดิม
8 — ลดตะขอ
ดังที่เห็นได้จากวงจรกระบวนการของเครนเหนือศีรษะ มอเตอร์ขับเคลื่อนรถเข็นจะถูกเปิดในการทำงานครั้งที่สองและเจ็ด เมื่อโบกี้เข้าใกล้ตำแหน่งที่กำหนดในระยะห่างของเครนเหนือศีรษะ มอเตอร์ไฟฟ้าของไดรฟ์โบกี้จะถูกเบรกด้วยไฟฟ้าเพื่อให้แน่ใจว่าการเบรกที่ต้องการมีความแม่นยำ
จากนั้นดับเครื่องยนต์และใช้เบรกเชิงกล นอกจากนี้ยังมีการเปิดใช้ไดรฟ์ไฟฟ้าของการเคลื่อนที่ของสะพานและโหลดจะเคลื่อนที่ไปตามเวิร์กช็อปตามงานด้านเทคโนโลยี เมื่อถึงสถานที่ที่กำหนด เครนจะหยุด โหลดจะลดลง จากนั้นจึงดำเนินการทางเทคโนโลยีที่จำเป็น

แผนภาพจลนศาสตร์ของกลไกการเคลื่อนที่ของรถเข็นพร้อมเครนเหนือศีรษะแสดงในรูปที่ 2 กลไกการเคลื่อนที่ของรถเข็นทำตามรูปแบบโดยมีกระปุกเกียร์อยู่ตรงกลางระหว่างล้อขับเคลื่อน
ไดรฟ์จากมอเตอร์ไฟฟ้า D ผ่านดิสก์เบรก T, กระปุกเกียร์ P, คลัตช์ M และเพลา B จะถูกส่งไปยังล้อที่กำลังวิ่ง รอกเบรกใช้เพื่อให้รถเข็นอยู่กับที่
รถเข็นมีล้อเลื่อนสี่ล้อและล้อขับเคลื่อนสองล้อ ล้อเคลื่อนที่ของรถเข็นเครนมักทำด้วยซี่โครงสองซี่
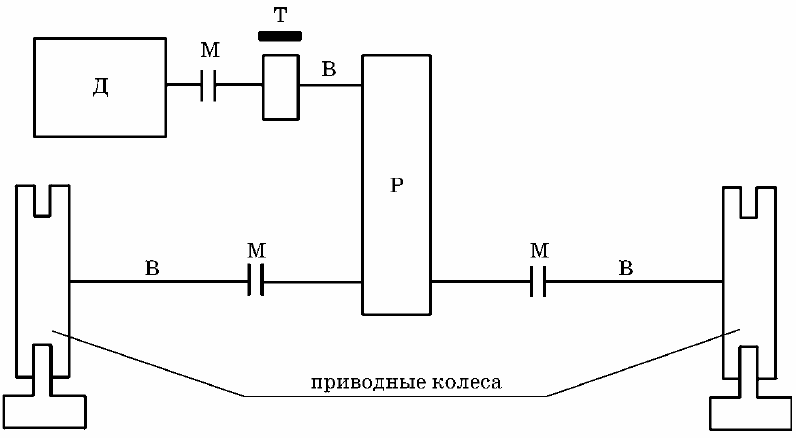
ข้าว. 2. แผนภาพการเคลื่อนไหวของกลไกการเคลื่อนที่ของรถเข็น
เวลาในการเคลื่อนย้ายรถเข็นไปยังตำแหน่งที่กำหนดจะพิจารณาจากเวลาในการเร่งและชะลอรถเข็นด้วยความเร่งที่กำหนดตามเงื่อนไขของกระบวนการทางเทคโนโลยี เครื่องวัดความเร็วรอบขณะเคลื่อนย้ายรถเข็นควรมีรูปแบบดังแสดงในรูปที่ 3
มันเป็นสิ่งจำเป็นเพื่อให้แน่ใจว่ากลไกโบกี้เริ่มต้นอย่างราบรื่นตามความเร็วที่กำหนดพร้อมความเร่งที่ต้องการ เพื่อให้มั่นใจถึงความแม่นยำของตำแหน่งที่จำเป็น จำเป็นต้องลดความเร็วของไดรฟ์ไฟฟ้าอย่างราบรื่นพร้อมกับเปลี่ยนเป็นความเร็วที่ลดลง หลังจากนั้นรถเข็นจะหยุด
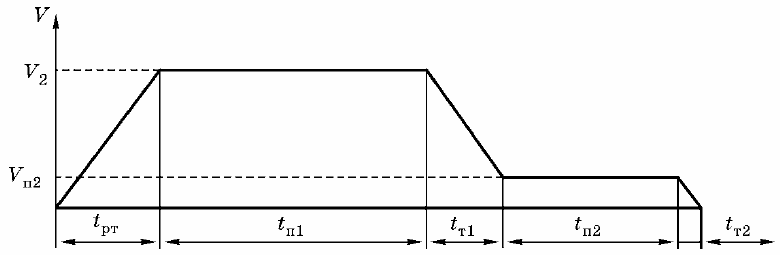
ข้าว. 3. กราฟวัดความเร็วรอบของกลไกการเคลื่อนที่ของรถเข็น
การเคลื่อนที่ของโบกี้ที่กระทบต่อโครงสร้างโลหะในข้อต่อราง การเร่งความเร็วและการชะลอตัวอย่างรุนแรง การสั่นสะเทือนตามธรรมชาติของโครงสร้างโลหะเมื่อโหลดเครื่องจักรทำให้เกิดผลกระทบเชิงกลที่รุนแรงมากต่ออุปกรณ์ไฟฟ้าที่อยู่บนโบกี้เครนสะพาน ตามนี้ ไดรฟ์ไฟฟ้าสำหรับการเคลื่อนย้ายรถเข็นต้องเป็นไปตามข้อกำหนดต่อไปนี้:
1) ไดรฟ์ไฟฟ้าต้องมีความสามารถในการเริ่มกลไกในการเคลื่อนที่ ย้อนกลับทิศทางการเคลื่อนที่และหยุดกลไกด้วยความเร่งที่ต้องการ (m / s2) และความแม่นยำของตำแหน่งที่ถูกต้อง (มม.)
2) ไดรฟ์ไฟฟ้าต้องให้การควบคุมความเร็วที่ราบรื่นลงจากหลัก
3) แรงบิดของเครื่องยนต์ที่พัฒนาขึ้นจะต้องให้การทำงานของกลไกที่ความเข้มที่กำหนด
4) ที่จำนวนเครื่องยนต์ที่สตาร์ทต่อชั่วโมงไม่ควรมีความร้อนสูงเกินไปของขดลวดเนื่องจากกลไกสามารถหยุดทำงานเป็นเวลานานได้
5) ต้องเลือกมอเตอร์ให้สอดคล้องกับสภาพการใช้งาน นั่นคือ ต้องมีการออกแบบที่เหมาะสม และขดลวดต้องทนความร้อนและมีฉนวนป้องกันความชื้น
6) มอเตอร์ขับเคลื่อนต้องมีมวลมู่เล่ที่เล็กที่สุดซึ่งมีผลกระทบอย่างมากต่อการไหลของชั่วคราวในระหว่างการสตาร์ทบ่อยครั้ง
7) มอเตอร์ขับเคลื่อนต้องตรงกับกำลังของกลไกการทำงานและมีความจุเกินที่จำเป็น
8) ไดรฟ์ไฟฟ้าต้องสร้างกระบวนการชั่วคราวด้วยระยะเวลาขั้นต่ำ
9) ต้องคำนึงถึงความปลอดภัยและความสะดวกในการบำรุงรักษาในการออกแบบไดรฟ์ไฟฟ้า

โมเมนต์คงที่สำหรับกลไกการเคลื่อนที่ที่ทำงานบนรางแนวนอนในโรงงานผลิตถูกสร้างขึ้นโดยแรงเสียดทานแบบเลื่อนในตลับลูกปืนและแรงเสียดทานแบบหมุนของล้อโบกี้ที่กลิ้งบนรางของเครนเหนือศีรษะ ช่วงเวลาคงที่ของกลไกระหว่างการเคลื่อนที่ไปข้างหน้าของรถเข็นจะพิจารณาจากความสามารถในการยกของเครน โมเมนต์คงที่ของกลไกระหว่างการเคลื่อนที่ย้อนกลับของโบกี้นั้นคำนวณสำหรับการบรรทุกที่ไม่สมบูรณ์
สำหรับการขับเคลื่อนด้วยไฟฟ้าของรถเข็นเครนเหนือศีรษะ มอเตอร์โรเตอร์แบบกรงกระรอกแบบอะซิงโครนัส (รวมถึง เป็นส่วนหนึ่งของตัวแปลงความถี่) มอเตอร์เหนี่ยวนำโรเตอร์แบบพันแผลและมอเตอร์กระแสตรงแบบกระตุ้นอิสระ